一种复杂结构目标与简单形体目标雷达鉴别方法
本发明属于雷达目标识别,具体涉及极化雷达同时检测到复杂结构目标和简单形体目标时,通过对获取的数据进行处理和分析,实现对复杂结构目标和简单形体目标的鉴别。
背景技术:
1、在现代雷达应用中,目标识别一直是一个重要而复杂的问题。实际应用中存在着各种各样的目标,这些目标的形状、大小、材料以及运动模式等各有差异,例如船只和浮标,然而各种因素作用下它们的雷达回波区分度却不明显。雷达系统在复杂多变的环境中有效探测目标后,还需要快速而准确地对所探测到的目标进行识别。其中,深入分析研究目标结构特征,同时根据机器学习方法利用数据进行驱动,可以实现快速准确的目标识别。
2、复杂结构目标通常具有多个散射中心,不规则的形状以及多样化的材质组成,这导致其回波信号呈现出复杂多变的特点。相比之下,简单形体目标具有较为规则的几何形状,其雷达回波信号更加规律可预测。可见,利用结构特征实现目标识别具有理论基础。目前已有学者分析结构特性进行相关鉴别研究,例如有学者利用复杂和简单目标在高分辨一维距离像上的径向长度差异来鉴别二者。然而,这并不适用于多个简单目标串联在一起的情况;也有学者通过极化分解利用复杂和简单目标的极化特征进行目标鉴别,然而极化分解需要满足非时变的散射条件。
3、综上,目前已有利用结构特征进行目标识别的相关研究,但部分特征适应性低,且较难提取。此外,许多研究仅从单域特征进行研究,限制了鉴别性能的提升,且稳健性有待提高。因此,尚未出现一种经过实际数据验证的多域特征联合、稳健性较强且易于工程实现的复杂结构目标与简单形体目标鉴别方法。
技术实现思路
1、本发明的目的是:提出一种复杂结构目标与简单形体目标的雷达鉴别方法,针对雷达接收到的回波中既包含复杂结构目标信号,也包含简单形体目标信号的情况,能够实现二者的有效鉴别。
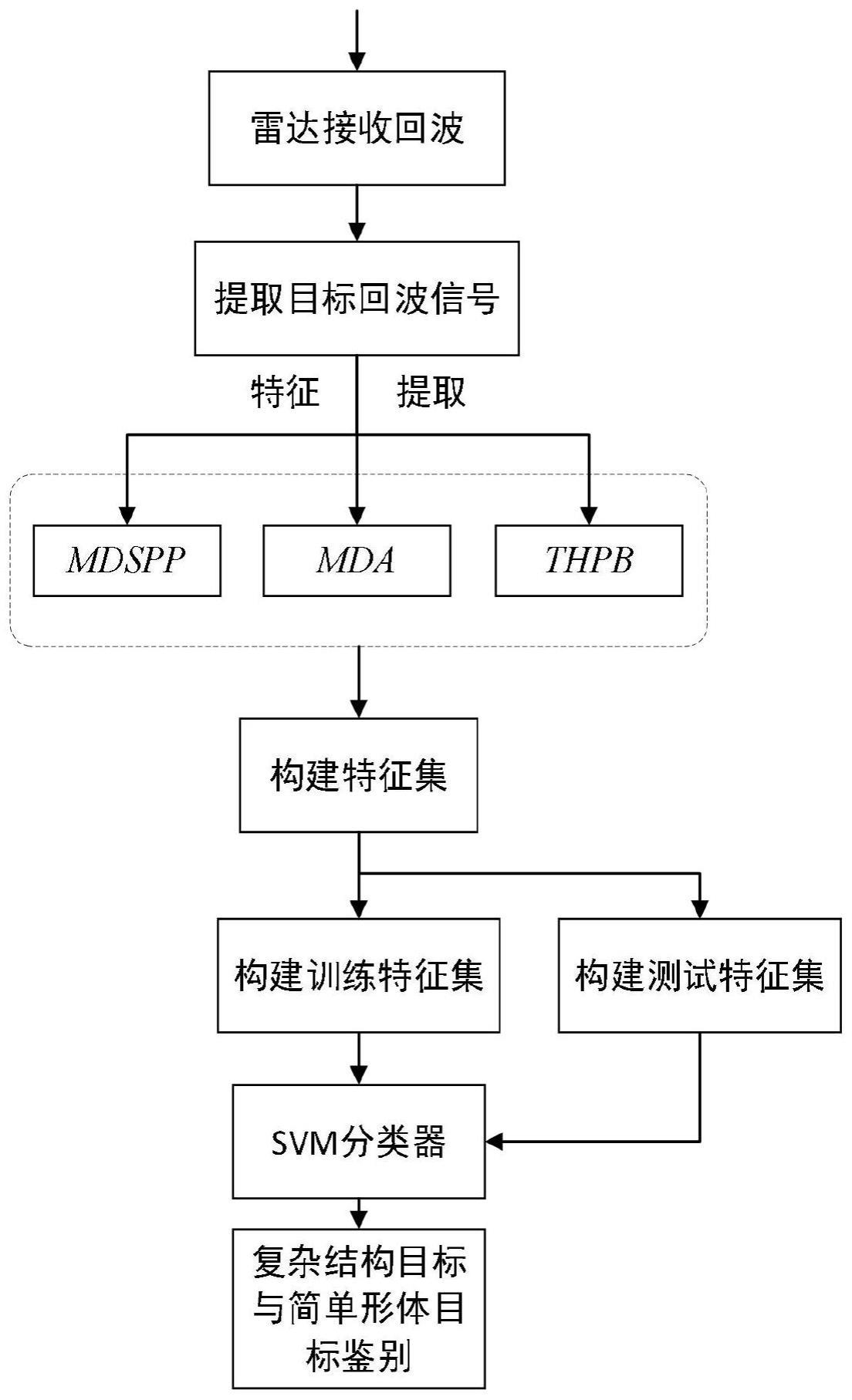
2、本发明的技术方案是:一种复杂结构目标与简单形体目标的雷达鉴别方法,具体包括如下步骤:
3、步骤1,利用改进的频域目标长度特征提取方法对雷达接收回波的高分辨距离像(high resolutionrange profile,hrrp)进行预处理,利用目标和杂波的频谱差异从海杂波中提取目标回波信号;
4、步骤2,基于步骤1得到各目标所占距离单元,分别计算每个目标的距离像特征:总半峰宽、平均差分幅度,以及极化特征:最强点平均位置差;
5、步骤3,将训练数据集经步骤1-2处理后得到训练特征集,进一步代入支持向量机(support vectormachine,svm)进行训练,得到训练后的svm分类器;
6、步骤4,使用上述分类器对雷达回波信号经所述预处理得到的样本特征进行分类,以区分复杂结构目标与简单形体目标。
7、进一步地,步骤1中的预处理方法具体操作为:使用滑窗在高分辨距离像上由左至右滑动,依次对滑窗内回波数据作傅里叶变换,以变换后幅度谱|x(f)|的均值μ和标准差σ乘积作为检验统计量t;然后,将检验统计量大于门限t1的距离单元选取为目标距离单元,其他为海杂波单元,并将各目标区域后移半个滑窗长度;最后对各目标区域间隔进行检验,排除某目标区域在中间弱散射区出现截断的情况。
8、进一步地,滑窗长度m取经验值3。
9、进一步地,门限t1为检验统计量样本均值乘以门限因子α。
10、进一步地,门限因子α根据场景内己方校准目标尺寸、雷达角度信息和距离分辨率进行调整。
11、进一步地,检验过程为,判断是否满足前后两区域间超过检测门限η的单元数所占比例小于k;若满足上述条件,则判定为杂波区;否则判定为截断区,进而将前后两区域合并为同一目标区域。
12、进一步地,检测门限η由海杂波幅度分布和虚警概率决定;
13、进一步地,k取经验值0.1;
14、进一步地,步骤2具体包括如下子步骤:
15、步骤21,搜寻目标区域中所有大于检测门限η的散射峰,计算其半峰宽,即大于峰高中点的散射单元数,求和得到该目标总半峰宽;
16、步骤22,计算目标区域内差分幅度,并用区域内最值进行归一化,取均值得到该目标平均差分幅度;
17、步骤23,搜寻目标在hh、vv极化通道散射最强点所在距离单元数,计算其绝对差;随机抽取多个脉冲处理所得结果,取均值得到该目标最强点平均位置差;
18、进一步地,步骤3中的训练数据集为外场实测数据集。
19、本发明的有益效果:
20、一、本发明利用的是雷达获得的高分辨距离像数据,易于获取、存储,进而便于特征计算;且由本发明技术方案可见,实现步骤计算量小,因此,本发明易于工程实现。
21、二、本发明经实测数据验证,适用于多种场景,适应性强;
22、三、本发明经实测数据验证,由于使用多域特征,在目标样本类型单一、覆盖应用情况不充分情况下,仍能达到较好效果,因此本发明稳健性强。
技术特征:
1.一种复杂结构目标与简单形体目标的雷达鉴别方法,其特征在于,具体包括如下步骤:
2.根据权利要求1所述的方法,其特征在于,步骤1中的预处理方法具体操作为:
3.根据权利要求2所述的方法,其特征在于,滑窗长度m取经验值3。
4.根据权利要求2所述的方法,其特征在于,门限t1为检验统计量样本均值乘以门限因子α。
5.根据权利要求4所述的方法,其特征在于,门限因子α根据场景内己方校准目标尺寸、雷达角度信息和距离分辨率进行调整。
6.根据权利要求2所述的方法,其特征在于,对各目标区域间隔进行检验的过程为,判断是否满足前后两区域间超过检测门限η单元数所占比例小于k;
7.根据权利要求6所述的方法,其特征在于,检测门限η由海杂波幅度分布和虚警概率决定。
8.根据权利要求6所述的方法,其特征在于,k取经验值0.1。
9.根据权利要求1所述的方法,其特征在于,步骤2具体包括如下子步骤:
10.根据权利要求1所述的方法,其特征在于,步骤3中的训练数据集为外场实测数据集。
技术总结
本发明属于雷达目标识别技术领域,具体涉及一种复杂结构目标与简单形体目标的雷达鉴别方法,包括利用改进的频域目标长度特征提取方法对雷达接收回波的高分辨距离像进行预处理,利用目标和杂波的频谱差异从海杂波中提取目标回波信号;分别计算每个目标的距离像特征以及极化特征,将训练特征集代入支持向量机得到训练后的SVM分类器;使用分类器对雷达回波信号经预处理得到的样本特征进行分类,以区复杂结构目标与简单形体目标。本发明针对雷达接收到的回波中既包含复杂结构目标信号,也包含简单形体目标的情况,能够实现复杂结构目标与简单形体目标的有效鉴别。
技术研发人员:杨勇,韩静雯,王雪松,李永祯,庞晨,连静,王威
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!