机器人的视觉检测方法及系统
本发明涉及机器人的,尤其涉及一种机器人的视觉检测方法及系统。
背景技术:
1、随着科技的发展,机器人逐步应用于海洋研究中,机器人充分利用了自身在水中活动的特征对水下环境进行探测,此时,机器人通过声呐对水下环境进行位置探测以及距离探测,通过声呐反馈的距离确定机器人相对于水下物体之间的距离,可是,针对水下环境的实际情况并无法得知,并且现有的机器人无法针对水下环境进行建模。
技术实现思路
1、本发明的目的在于克服现有技术的不足,本发明提供了一种机器人的视觉检测方法及系统,对下方图像进行立体建模,并且虚拟水下环境,从而根据声呐和多个摄像头复现水下环境,并且将下方图像以实际的环境进行立体式建模,以便于机器人根据虚拟的水下环境进行调整,从而保证了机器人在水下活动的安全性。
2、为了解决上述技术问题,本发明实施例提供了一种机器人的视觉检测方法,应用于机器人;
3、所述机器人的视觉检测方法,包括:
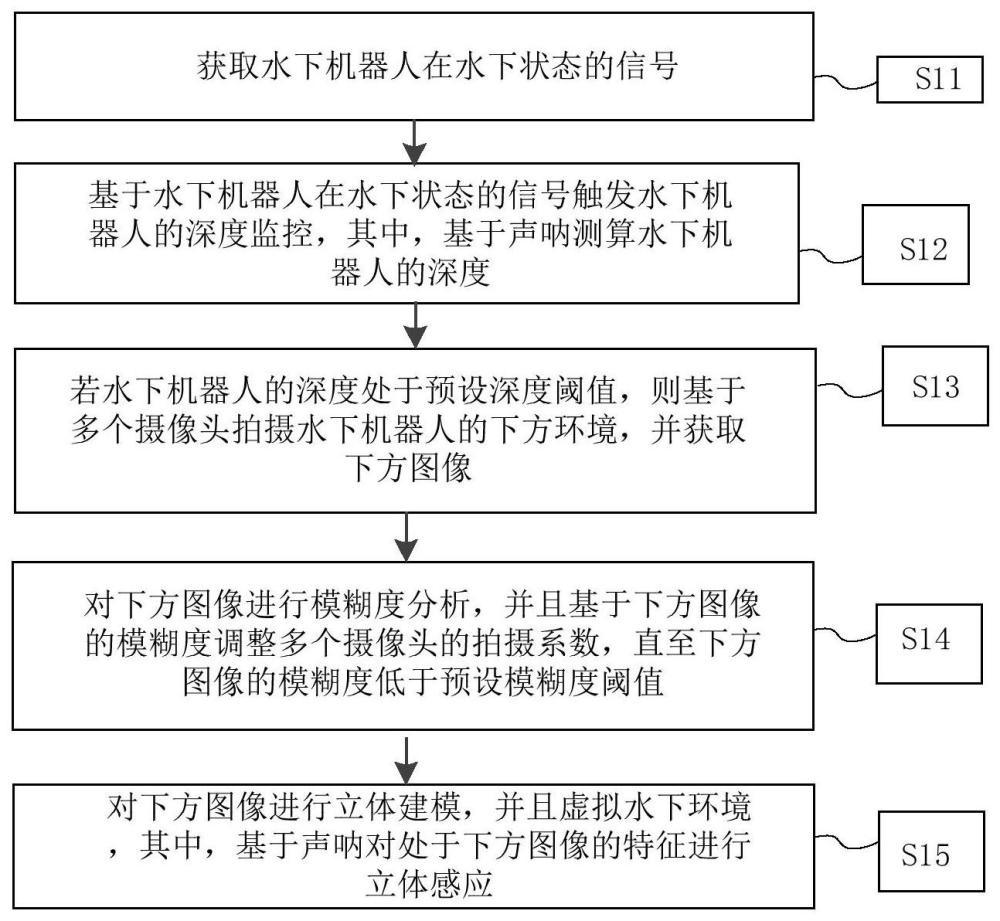
4、获取机器人在水下状态的信号;
5、基于机器人在水下状态的信号触发机器人的深度监控,其中,基于声呐测算机器人的深度;
6、若机器人的深度处于预设深度阈值,则基于多个摄像头拍摄机器人的下方环境,并获取下方图像;
7、对下方图像进行模糊度分析,并且基于下方图像的模糊度调整多个摄像头的拍摄系数,直至下方图像的模糊度低于预设模糊度阈值;
8、对下方图像进行立体建模,并且虚拟水下环境,其中,基于声呐对处于下方图像的特征进行立体感应。
9、另外,本发明实施例还提供了一种机器人的视觉检测系统,所述机器人的视觉检测系统包括:
10、获取模块,用于获取机器人在水下状态的信号;
11、深度模块,用于基于机器人在水下状态的信号触发机器人的深度监控,其中,基于声呐测算机器人的深度;
12、图像模块,用于若机器人的深度处于预设深度阈值,则基于多个摄像头拍摄机器人的下方环境,并获取下方图像;
13、分析模块,用于对对下方图像进行模糊度分析,并且基于下方图像的模糊度调整多个摄像头的拍摄系数,直至下方图像的模糊度低于预设模糊度阈值;
14、感应模块,用于对下方图像进行立体建模,并且虚拟水下环境,其中,基于声呐对处于下方图像的特征进行立体感应。
15、在本发明实施例中,通过本发明实施例中的方法,基于机器人在水下状态的信号触发机器人的深度监控,其中,基于声呐测算机器人的深度;若机器人的深度处于预设深度阈值,则基于多个摄像头拍摄机器人的下方环境,以便于在一定深度下启动多个摄像头的拍摄,从而保证了下方图像,为了进一步保证下方图像的清晰,对下方图像进行模糊度分析,并且基于下方图像的模糊度调整多个摄像头的拍摄系数,直至下方图像的模糊度低于预设模糊度阈值,从而保证了下方图像的清晰以及降低水对拍摄的影响,此时,对下方图像进行立体建模,并且虚拟水下环境,从而根据声呐和多个摄像头复现水下环境,并且将下方图像以实际的环境进行立体式建模,以便于机器人根据虚拟的水下环境进行调整,从而保证了机器人在水下活动的安全性,并且确定水下环境的实际情况。
技术特征:
1.一种机器人的视觉检测方法,其特征在于,应用于机器人;
2.根据权利要求1所述的机器人的视觉检测方法,其特征在于,所述获取机器人在水下状态的信号,包括:
3.根据权利要求2所述的机器人的视觉检测方法,其特征在于,所述触发机器人的密封测试,包括:
4.根据权利要求1所述的机器人的视觉检测方法,其特征在于,所述基于机器人在水下状态的信号触发机器人的深度监控,其中,基于声呐测算机器人的深度,包括:
5.根据权利要求1所述的机器人的视觉检测方法,其特征在于,所述若机器人的深度处于预设深度阈值,则基于多个摄像头拍摄机器人的下方环境,并获取下方图像,包括:
6.根据权利要求5所述的机器人的视觉检测方法,其特征在于,所述若机器人的深度处于预设深度阈值,则基于多个摄像头拍摄机器人的下方环境,并获取下方图像,还包括:
7.根据权利要求6所述的机器人的视觉检测方法,其特征在于,所述对下方图像进行模糊度分析,并且基于下方图像的模糊度调整多个摄像头的拍摄系数,直至下方图像的模糊度低于预设模糊度阈值,包括:
8.根据权利要求7所述的机器人的视觉检测方法,其特征在于,所述对下方图像进行立体建模,并且虚拟水下环境,其中,基于声呐对处于下方图像的特征进行立体感应,包括:
9.根据权利要求8所述的机器人的视觉检测方法,其特征在于,所述对下方图像进行立体建模,并且虚拟水下环境,其中,基于声呐对处于下方图像的特征进行立体感应,还包括:
10.一种机器人的视觉检测系统,其特征在于,所述机器人的视觉检测系统应用于如权利要求1-9中任一所述的机器人的视觉检测方法,所述机器人的视觉检测系统包括:
技术总结
本发明公开了一种机器人的视觉检测方法及系统,其中,基于声呐测算机器人的深度;若机器人的深度处于预设深度阈值,则基于多个摄像头拍摄机器人的下方环境,以便于在一定深度下启动多个摄像头的拍摄,从而保证了下方图像,为了进一步保证下方图像的清晰,对下方图像进行模糊度分析,并且基于下方图像的模糊度调整多个摄像头的拍摄系数,直至下方图像的模糊度低于预设模糊度阈值,从而保证了下方图像的清晰以及降低水对拍摄的影响,此时,对下方图像进行立体建模,并且虚拟水下环境,从而根据声呐和多个摄像头复现水下环境,并且将下方图像以实际的环境进行立体式建模。
技术研发人员:李丽丽,王丽杨,李红霞
受保护的技术使用者:顺德职业技术学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!