一种多运动模式下肢步态特征二维化识别方法
本申请涉及分类器学习能力,具体涉及一种多运动模式下肢步态特征二维化识别方法。
背景技术:
1、全球人口老龄化程度日趋加剧,各国的社会负担逐渐增加,随着老人年龄的增长,人体的骨骼肌逐渐萎缩,使得老人行动能力逐渐减弱、易跌倒和外出意愿下降,进而导致骨骼肌加速萎缩,久而久之会形成一个恶性循环。研究表明,老人步行能力与其预期寿命关系密切,通过提升老人步行能力,可以有效缓解老人随年龄增长带来的诸多生理与心理问题。外骨骼机器人是一种具有机电一体化设计的可穿戴机器人,主要由传动系统、感知控制系统和能源系统组成,其功能是通过增强下肢肌肉和骨骼的力量及活动范围,帮助行走不便的人进行站立、行走和攀爬等活动,这使得步行助力外骨骼机器人受到了广泛关注,其成功研制有望打破恶性循环,提升老人的行走能力和行走意愿,确保有一个身心健康的高质量晚年生活。
2、当前,外骨骼机器人技术仍存在许多挑战,如符合人体工程学的结构设计、高效的人机协调控制系统、可靠性和安全性等问题,其中在外骨骼控制系统的设计中,由于人体下肢运动模式多样,每种运动模式又细分为多个步态相位,不同个体间的步态也具有较大差异性,并且,采集到的肌电信号与步态相位之间的关系往往是非线性的,传统的线性分类器难以捕捉到复杂的特征模式,这使得外骨骼机器人在行走过程中,无法准确的识别其处于什么样的步态相位,从而对外骨骼智能控制系统的设计也带来了困难。
技术实现思路
1、本申请的目的是针对以上问题,提供一种多运动模式下肢步态特征二维化识别方法,包括如下步骤:
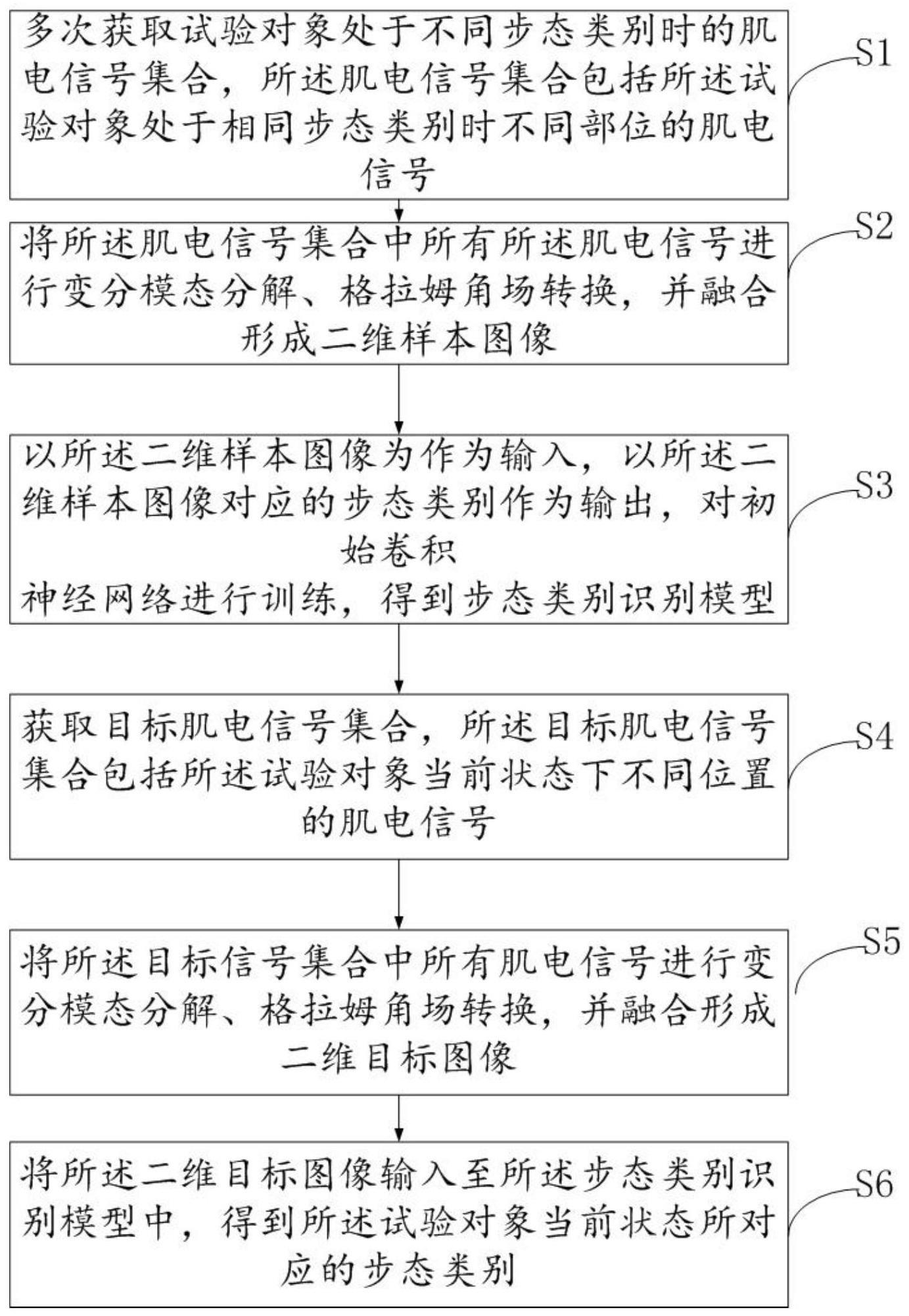
2、多次获取试验对象处于不同步态类别时的肌电信号集合,所述肌电信号集合包括所述试验对象处于相同步态类别时不同部位的肌电信号;
3、将所述肌电信号集合中所有所述肌电信号进行变分模态分解、格拉姆角场转换,并融合形成二维样本图像;
4、以所述二维样本图像为作为输入,以所述二维样本图像对应的步态类别作为输出,对初始卷积神经网络进行训练,得到步态类别识别模型;
5、获取目标肌电信号集合,所述目标肌电信号集合包括所述试验对象当前状态下不同部位的肌电信号;
6、将所述目标信号集合中所有肌电信号进行变分模态分解、格拉姆角场转换,并融合形成二维目标图像;
7、将所述二维目标图像输入至所述步态类别识别模型中,得到所述试验对象当前状态所对应的步态类别。
8、根据本申请提供的技术方案,所述多次获取试验对象处于不同步态类别时的肌电信号集合步骤包括:
9、采集试验对象处于不同运动模式时,不同部位的原始肌电信号;并同时录制所述实验对象处于不同运动模式时的视频数据;
10、对所述原始肌电信号进行预处理,得到第一肌电信号;
11、根据所述视频数据,将各个所述第一肌电信号分解为多个具有不同步态相位的肌电信号;将具有相同运动模式、相同步态相位的肌电信号形成所述肌电信号集合,所述步态类别包括不同运动模式下的不同步态相位;
12、多次重复上述步骤,得到多个所述肌电信号集合。
13、根据本申请提供的技术方案,对经格拉姆角场转换之后形成的数据做归一化处理,得到第一数据;
14、将所述第一数据由笛卡尔坐标系转换为极坐标系,得到第二数据;
15、将第二数据输入至格拉姆角场求和场的公式中,计算格拉姆角场求和场,将所有格拉姆角场求和场融合形成所述二维样本图像。
16、根据本申请实施例提供的技术方案,所述原始肌电信号通过无线肌电采集系统采集得到,所述无线肌电采集系统具有七个通道,以使得同时对多个部位进行采集。
17、根据本申请提供的技术方案,所述运动模式包括:平地行走模式、跑步模式、上楼梯模式和下楼梯模式。
18、根据本申请提供的技术方案,所述部位包括:下肢肌肉中股内侧肌、股外侧肌、半腱肌、股直肌、内侧腓肠肌、外侧腓肠肌以及比目鱼肌。
19、根据本申请提供的技术方案,所述预处理包括滤波处理、整流处理;所述滤波处理为fir带通信号滤波处理,fir带通信号滤波处理设置有截止频率,所述截止频率的低频设为20hz,所述截止频率的高频设为500hz。
20、根据本申请提供的技术方案,所述fir带通信号滤波处理使用平滑滤波处理的方式,所述平滑滤波处理的方式为rms算法。
21、与现有技术相比,本申请的有益效果:本发明提供了多运动模式下基于肌电信号分解的下肢步态特征二维化识别方法,该方法首先要多次获取试验对象处于不同步态类别时的肌电信号集合,每一个肌电信号集合都包括试验对象处于相同步态类别时不同部位的肌电信号,对每一个肌电信号集合中的肌电信号依次进行变分模态分解、格拉姆角场转化,并融合成二维样本图像,以此作为输入,以该二维样本图像对应的步态类别作为输出,对初始卷积神经网络进行训练,得到步态类别识别模型,然后获取包含试验对象当前状态下不同部位的肌电信号的目标肌电信号集合,对目标肌电信号集合中的所有肌电信号依次进行变分模态分解、格拉姆角场转化,并融合成二维目标图像,将该二维目标图像输入至步态类别识别模型中,就能够得到试验对象当前状态所对应的步态类别;
22、在使用的过程中,首先要获取实验对象处于不同步态类别时的肌电信号集合,然后对该肌电信号集合进行变分模态分解、格拉姆较场转换,在经过这两步处理并融合之后,得到二维样本图像,将该二维样本图像作为输入,以该二维样本图像相对应的步态类别作为输出,输入至初始卷积神经网络中,并进行训练,得到步态类别识别模型,在具体应用的时候,首先要获取目标肌电信号集合,其中,目标肌电信号集合中包括有试验对象在当前状态下不同部位的肌电信号,对目标肌电信号集合中的肌电信号也同样做变分模态分解、格拉姆较场转换的处理,在处理之后融合形成二维目标图像,将该二维目标图像输入至步态类别识别模型中,就能够得知试验对象在当前的状态下处于什么样的步态类别,通过本申请中的方式,能够学习和表示非线性关系,因此能够更好的识别肌电信号于步态类别之间的复杂模式,并且通过卷积神经网络还可以提高计算效率,以实现能够较快的预测和响应速度,这对于外骨骼机器人的实时行走控制和动态调整非常重要,并且还可以利用较少的特征工程和标注数据量,通过端到端的学习方式自动提取和学习特征,这减轻了数据收集和标注的工作负担,并使得训练过程更加高效和灵活;与传统的识别方式相比,同时还提高了步态识别的效率,为外骨骼机器人智能控制方法提供了技术支撑,有助于提高外骨骼人机系统的高效性和协调性。
技术特征:
1.一种多运动模式下肢步态特征二维化识别方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的多运动模式下肢步态特征二维化识别方法,其特征在于,所述多次获取试验对象处于不同步态类别时的肌电信号集合步骤包括:
3.根据权利要求2所述的多运动模式下肢步态特征二维化识别方法,其特征在于,对经格拉姆角场转换之后形成的数据做归一化处理,得到第一数据;
4.根据权利要求2所述的多运动模式下肢步态特征二维化识别方法,其特征在于,所述原始肌电信号通过无线肌电采集系统采集得到,所述无线肌电采集系统具有七个通道,以使得同时对多个部位进行采集。
5.根据权利要求2所述的多运动模式下肢步态特征二维化识别方法,其特征在于,所述运动模式包括:平地行走模式、跑步模式、上楼梯模式和下楼梯模式。
6.根据权利要求1所述的多运动模式下肢步态特征二维化识别方法,其特征在于,所述部位包括:下肢肌肉中股内侧肌、股外侧肌、半腱肌、股直肌、内侧腓肠肌、外侧腓肠肌以及比目鱼肌。
7.根据权利要求2所述的多运动模式下肢步态特征二维化识别方法,其特征在于,所述预处理包括滤波处理、整流处理;所述滤波处理为fir带通信号滤波处理,fir带通信号滤波处理设置有截止频率,所述截止频率的低频设为20hz,所述截止频率的高频设为500hz。
8.根据权利要求7所述的多运动模式下肢步态特征二维化识别方法,其特征在于,所述fir带通信号滤波处理使用平滑滤波处理的方式,所述平滑滤波处理的方式为rms算法。
技术总结
本申请提供一种多运动模式下肢步态特征二维化识别方法,属于分类器学习能力领域,所述方法包括:获取对象处于不同步态类别时的肌电信号集合,对集合中的所有肌电信号进行变分模态分解、格拉姆角场转换,融合形成二维样本图像,以二维样本图像作为输入,以其对应的步态类别作为输出,对初始卷积神经网络进行训练,得到步态类别识别模型,然后获取目标肌电信号集合,对集合内的信号做相同的处理,输入至步态类别识别模型中,可得到当前状态对应的步态类别;本申请在经过初始卷积神经网络处理之后的数据,在不同模式下步态识别率相较于传统识别方法分别有所提升,有助于提高外骨骼人机系统的高效性和协调性。
技术研发人员:陈俊霖,王珊,刘启明,代玉星,李涛,张俊飞,郭士杰,王旭升
受保护的技术使用者:河北工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!