一种基于机器学习的合成孔径雷达图像风向反演方法
本发明属于遥感,尤其涉及一种基于机器学习的合成孔径雷达图像风向反演方法。
背景技术:
1、合成孔径雷达是一种遥感技术,在海面风场和波浪监测的具有明显优势,尤其是对热带气旋。国内的合成孔径雷达高分三号,01星于2016年成功在轨运行,现已实现三星组网观测。c波段的高分三号具有多达12种的成像模式,可以观测各种海面动力学,例如风、波浪、涡流、内波、上升流和热带气旋等。从合成孔径雷达图像中可以获得全天候和全天条件下的海面风场,空间分辨率可达米级,优于散射计。合成孔径雷达获得的风场信息有助于增强对海洋-大气边界层,特别是沿海地区的海洋学过程的理解。
2、现有研究基于经验关系已经开发了几个风场反演的地球物理模型,是归一化雷达后向散射截面与方位角、风矢量和入射角的函数。地球物理模型函数中有两个未知变量(即风速和方向),需要先获取其中一个变量,才能反演另一个变量。
3、目前解决地球物理模型函数在合成孔径雷达中应用的困难,主要有三种方法。第一种方法是直接采用全球数值天气预报模型(nwp)和散射计的风向。尽管该方法应用方便,但其缺点是基于nwp/散射仪的风向的典型空间尺度约为25km,与合成孔径雷达图像的空间尺度不匹配。此外,基于sar/散射计的风向具有一定的时间差。第二种方法是从合成孔径雷达强度谱中提取风向。这种方法仅适用于均匀图像,还容易受其他海面现象的干扰。第三种方法是通过使用图像处理技术,如局部梯度法和小波分析,利用合成孔径雷达图像中的线性特征获取风向。第二种和第三种方法都需要依赖外部数据来剔除风向的180°模糊。
技术实现思路
1、针对现有技术存在的不足,本发明提出一种基于机器学习的合成孔径雷达图像风向反演方法,以解决现有技术中需要借助外部数据反演合成孔径雷达风矢量的技术问题。
2、具体地,一种基于机器学习的合成孔径雷达图像风向反演方法,步骤如下:
3、获取具有明显风条纹的高分三号合成孔径雷达波模式1a级产品数据;
4、将所述波模式数据进行频谱变换,根据谱分布特征得到带有180°模糊的海面风向;
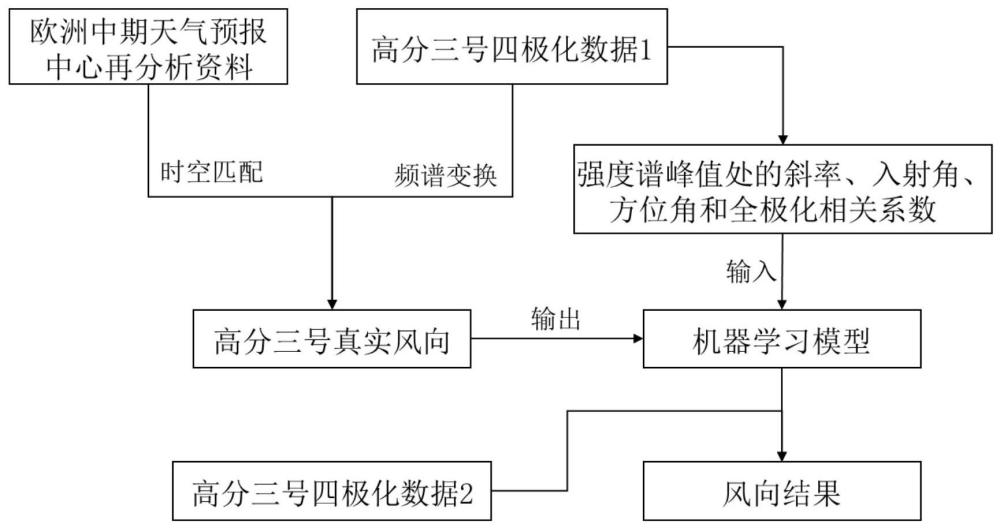
5、利用时空匹配的欧洲中期天气预报中心再分析数据对带有180°模糊的海面风向进行去模糊,得到真实风向;
6、计算四个极化数据之间的极化相关系数;
7、以合成孔径雷达的强度谱峰值处的斜率、入射角、方位角和四个极化相关系数作为输入,风向作为输出,通过机器学习建立高分三号合成孔径雷达风向反演模型。
8、进一步的,所述波模式1a级产品数据的极化方式为四极化,包括:垂直发射垂直接收(vv)、垂直发射水平接收(vh)、水平发射垂直接收(hv)和水平发射水平接收(hh)。像素大小为5m,入射角范围从20至41°。
9、进一步的,使用的频谱变换方法包括但不限于:二维傅里叶变换、二维墨西哥帽小波变换。对波模式的vv极化数据进行频谱变换得到带有180°模糊的风向。
10、进一步的,所述海面风向是海面10m高度的风向。
11、进一步的,使用的欧洲中期天气预报中心再分析数据的版本是第五代,空间分辨率为0.25°,时间分辨率为1小时。
12、进一步的,四个极化数据包括:vv和vh、vv和hh、hh和hv、hv和vh之间的极化相关系数,计算公式为:
13、
14、式中pcc是复数,表示pp和qq极化中的相关性和相位差。散射矩阵s由散射元件组成,并表示如下:
15、
16、式中svv是复数,表示vv极化的振幅和相位,其指示散射信号的强度和相位延迟,其他三个元素表示对应极化方式的测量数据。
17、进一步的,所述通过机器学习建立高分三号合成孔径雷达风向反演模型,包括以下步骤:
18、步骤1、确定lightgbm的损失函数为多元加性回归树(mart),对于输入训练样本集l,其mart损失函数定义如下:
19、
20、其中yi表示样本xi的真实标签值,f(xi)表示样本xi的预测值,δ(i)是第i轮中第i个样本的相对重要性,λ是正则化项的权重,φ是输出模型参数。
21、步骤2、离散处理,lightgbm通过离散连续的数值特征来减少内存使用并加快训练过程。对于连续特征f,lightgbm被划分为n个直方图区间bin1,bin2,......,binn。对于样本i∈[1,n],fi被映射到相应的直方图区间上:
22、
23、其中tk是根据直方图划分方法获得的阈值。
24、步骤3、统计直方图梯度,lightgbm以直方图组为单位,同时计算各组的梯度累积值。
25、(1)首先,计算左右子节点中所有样本的梯度之和和和二阶导数之和。
26、
27、其中gl和gr分别是左子树和右子树中所有样本的梯度和;hl和hr是hessian矩阵的和或所有样本的二阶导数和;δ(i)是当前样本的相对比重;il和ir是分别分配给左子树和右子树的样本集。
28、(2)选择最优特征及其相应的划分点。具体地,列举所有特征和该特征内的所有可能的分割点,计算损失增益,最后,选择最大化损失增益的特征和分割点。
29、(3)递归地生长新的叶节点,直到达到最大深度或者节点中的样本数量小于某个阈值。
30、步骤4、预测过程在每个测试样本上,通过向下搜索经过训练的决策树的层来计算最终的叶节点,并将叶节点的输出作为模型的预测结果。
31、进一步的,利用新的合成孔径雷达数据输入机器学习模型得到风向结果,将风速结果与时空匹配的其他方法、其他载荷风场数据进行对比,其他方法包括但不限于:欧洲中期天气预报中心再分析资料、全球数值预报数据、频谱法反演风向,其他载荷风场数据包括但不限于:散射计风向、辐射计风向,验证算法的有效性。
技术特征:
1.一种基于机器学习的合成孔径雷达图像风向反演方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于机器学习的合成孔径雷达图像风向反演方法,其特征在于,所述雷达波模式产品数据的极化方式为四极化,包括:垂直发射垂直接收vv、垂直发射水平接收vh、水平发射垂直接收hv和水平发射水平接收hh;波模式数据的像素大小为5m,入射角范围为20°-41°。
3.根据权利要求1所述的基于机器学习的合成孔径雷达图像风向反演方法,其特征在于,使用的频谱变换方法包括至少包括二维傅里叶变换、二维墨西哥帽小波变换之一;对波模式的vv极化数据进行频谱变换得到带有180°模糊的风向。
4.根据权利要求1所述的基于机器学习的合成孔径雷达图像风向反演方法,其特征在于,所述海面风向是海面10m高处的风向。
5.根据权利要求1所述的基于机器学习的合成孔径雷达图像风向反演方法,其特征在于,使用的欧洲中期天气预报中心再分析数据的版本是第五代,空间分辨率为0.25°,时间分辨率为1小时。
6.根据权利要求1所述的基于机器学习的合成孔径雷达图像风向反演方法,其特征在于,四个极化数据的极化相关系数包括:vv和vh、vv和hh、hh和hv、hv和vh,计算公式为:
7.根据权利要求1所述的基于机器学习的合成孔径雷达图像风向反演方法,其特征在于,所述通过机器学习建立雷达风向反演模型的机器学习模型为lightgbm,通过以下步骤进行学习:
技术总结
本发明属于遥感技术领域,公开了一种基于机器学习的合成孔径雷达图像风向反演方法,包括以下步骤:获取高分三号数据及其时空匹配的欧洲中期天气预报中心再分析资料;使用频谱变换方法和欧洲中期天气预报中心再分析资料从高分三号数据获取准确风向;计算四个极化信号之间的极化相关系数;以合成孔径雷达的强度谱峰值处的斜率、入射角、方位角和四极化相关系数作为输入,风向作为输出,通过机器学习建立高分三号合成孔径雷达风向反演模型。本发明提供了一种在没有任何外部信息的情况下从四极化高分三号合成孔径雷达图像中反演风向的方案,为实现合成孔径雷达不借助外界信息反演海面矢量风奠定了基础。
技术研发人员:赵现斌,艾未华,郭超刚,胡申森,谭仲辉,胡雄
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!