一种隧道场景下的图像质量优化方法与流程
本发明属于图像算法,具体涉及一种隧道场景下的图像质量优化方法。
背景技术:
1、在隧道内获取的素材通常存在亮度底、光照不均衡和噪声大等特点,这会影响到后续的车辆识别和跟踪。目前,虽然存在一些图像增强方法,但是对于隧道场景下的图像质量问题并未得到有效解决。在实际应用中,隧道内图片质量不佳会导致以下三个负面影响:
2、1、无法有效使用开源数据集,开源数据集通常是光照较好的数据;
3、2、各隧道获取的可见光存在较大的区别,增加了场景的复杂度和可见光素材的多样性;
4、3、暗光场景下的数据辨识度较低,标注困难。
技术实现思路
1、针对上述背景技术介绍中存在的问题,本发明的目的在于提供了一种隧道场景下的图像质量优化方法,提高隧道场景下车辆跟踪的精度和效率,降低数据标注工作量,以及增加模型和算法的复用性。
2、本发明采用的技术方案是:
3、一种隧道场景下的图像质量优化方法,其具体步骤如下:
4、s1,进行车辆reid模型、车辆分类模型、画质优化模型的训练;
5、s2,获取隧道场景下的图片,切割出车辆目标区域;
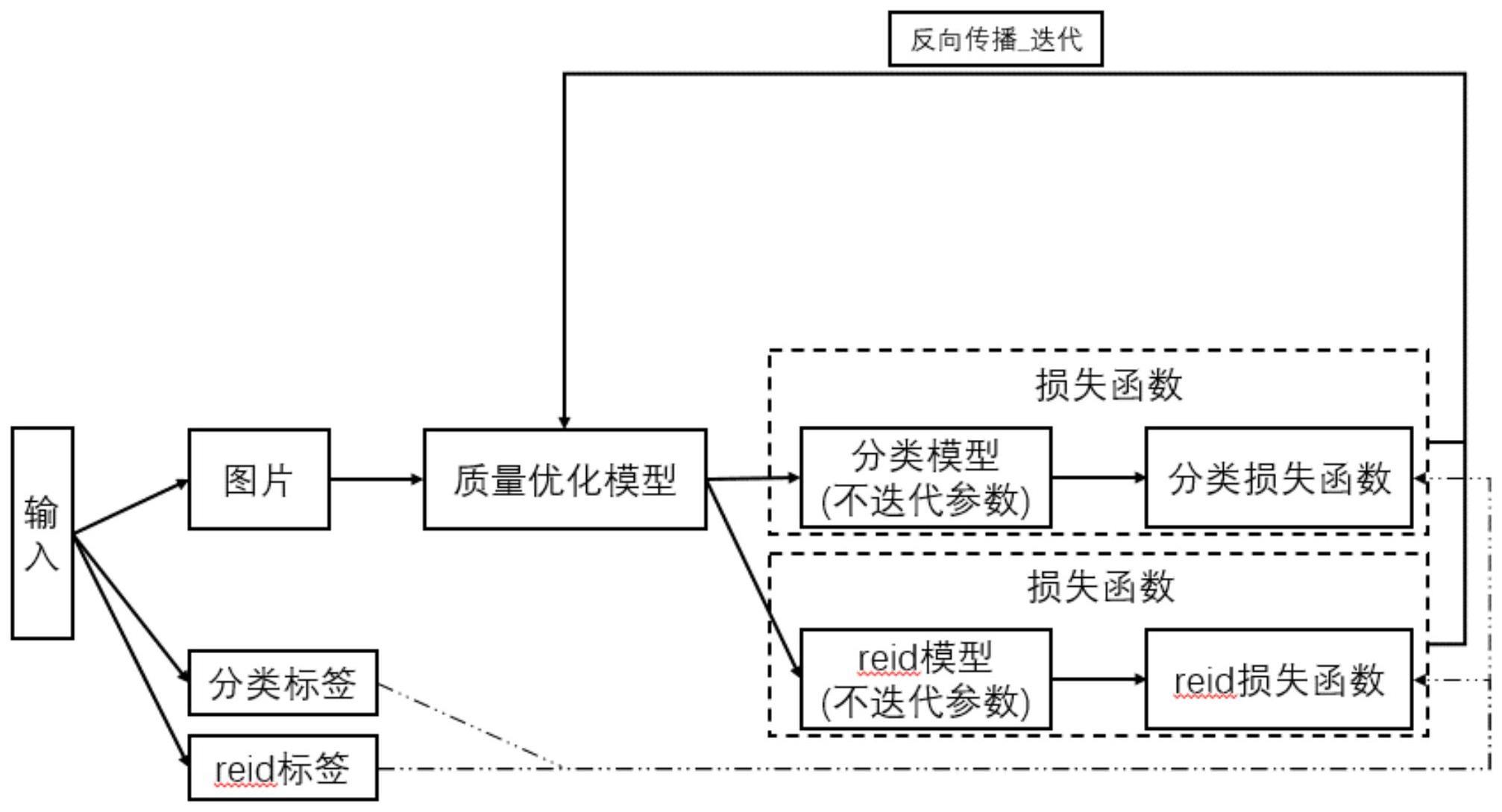
6、s3,将车辆目标区域输入到画质优化模型中,并将车辆reid模型结合reid损失函数、车辆分类模型结合分类损失函数中一种或两者结合作为画质优化模型的损失函数对车辆目标区域的画质进行优化输出优化图。本发明通过将画质优化模型中的损失函数设定为车辆reid模型结合reid损失函数、车辆分类模型结合分类损失函数中一种或两者结合,对隧道内数据进行质量优化,提升画质,主要为暗光增强,良好的画质,有助于提升检测/识别的精度。
7、进一步,还包括步骤s4,对步骤s3中的优化图进行车辆reid计算、车辆分类计算,获取车辆特征向量,车辆分类信息。
8、进一步,步骤s1中所述车辆reid模型、车辆分类模型的训练步骤包括:
9、s01,获取隧道内的开源数据并初步优化处理后作为训练数据;
10、s02,将步骤s01中的训练数据分别输入到车辆reid模型、车辆分类模型中进行训练;
11、s03,获得车辆reid模型、reid损失函数、车辆分类模型、分类损失函数的参数并固化。本发明的车辆reid模型、reid损失函数、车辆分类模型、分类损失函数的参数训练好后作为固定的函数,不迭代参数,即只参与反向传播,但是不迭代,不改变参数。
12、进一步,步骤s01中所述开源数据是常规光照下的可见光数据。
13、进一步,步骤s01中初步优化处理包括去噪、暗光增强。
14、进一步,所述车辆reid模型的主干为resnet50网络,输出特征维度为512,损失函数使用loss=softmax_loss+center_loss;
15、其中,center_loss是一种开源的特征损失函数,具体公式如下:
16、
17、其中,n代表同一批次的样本数,xi代表第i个样本,c代表xi所属类别的中心,代表xi和c的特征距离;
18、softmax_loss也是一种开源损失函数,具体公式如下:
19、
20、其中,t代表同一批次的样本数,yj代表当前样本的标签;sj的公式如下:
21、
22、其中,aj代表第j个输出节点的概率值(输出节点数与类别数相等);m代表类别数,也就是节点数。
23、进一步,所述车辆分类模型,主干为mobilenetv3网络,损失函数为softmax_loss。
24、进一步,步骤s1中画质优化模型的训练步骤包括:
25、s11,使用隧道场景下的暗光图片,切割出车辆目标区域作为训练数据;
26、s12,将步骤s11中的训练数据输入到画质优化模型中进行训练,并将车辆reid模型结合reid损失函数、车辆分类模型结合分类损失函数中一种或两者结合作为画质优化模型的损失函数;
27、s13,获得画质优化模型的参数。本发明的画质优化模型的参数会随着模型训练,迭代变化。
28、进一步,所述画质优化模型为unet模型。
29、进一步,所述车辆reid模型结合reid损失函数和车辆分类模型结合分类损失函数两者结合时需进行加权后作为损失函数。
30、本发明与现有技术相比,其显著优点包括:
31、1、采用了画质优化(主要是暗光增强)的方案,能够显著提高隧道场景下图像质量,并增加模型和算法的复用性;
32、2、使用训练好的模型作为损失函数,相较于传统解析画质损失函数,能够更有效地提高图像质量;
33、3、实施方式简单易行,适用于隧道场景下的图像质量优化。
技术特征:
1.一种隧道场景下的图像质量优化方法,其具体步骤如下:
2.根据权利要求1所述的一种隧道场景下的图像质量优化方法,其特征在于:还包括步骤s4,对步骤s3中的优化图进行车辆reid计算、车辆分类计算,获取车辆特征向量,车辆分类信息。
3.根据权利要求1或2所述的一种隧道场景下的图像质量优化方法,其特征在于:步骤s1中所述车辆reid模型、车辆分类模型的训练步骤包括:
4.根据权利要求3所述的一种隧道场景下的图像质量优化方法,其特征在于:步骤s01中所述开源数据是常规光照下的可见光数据。
5.根据权利要求3所述的一种隧道场景下的图像质量优化方法,其特征在于:步骤s01中初步优化处理包括去噪、暗光增强。
6.根据权利要求3所述的一种隧道场景下的图像质量优化方法,其特征在于:所述车辆reid模型的主干为resnet50网络,输出特征维度为512,损失函数为loss=softmax_loss+center_loss;
7.根据权利要求6所述的一种隧道场景下的图像质量优化方法,其特征在于:所述车辆分类模型,主干为mobilenetv3网络,损失函数为softmax_loss。
8.根据权利要求1所述的一种隧道场景下的图像质量优化方法,其特征在于:步骤s1中画质优化模型的训练步骤包括:
9.根据权利要求8所述的一种隧道场景下的图像质量优化方法,其特征在于:所述画质优化模型为unet模型。
10.根据权利要求1所述的一种隧道场景下的图像质量优化方法,其特征在于:所述车辆reid模型结合reid损失函数和车辆分类模型结合分类损失函数两者结合时需进行加权后作为损失函数。
技术总结
本发明提供了一种隧道场景下的图像质量优化方法,其具体步骤如下:S1,进行车辆reid模型、车辆分类模型、画质优化模型的训练;S2,获取隧道场景下的图片,切割出车辆目标区域;S3,将车辆目标区域输入到画质优化模型中,并将车辆reid模型结合reid损失函数、车辆分类模型结合分类损失函数中一种或两者结合作为画质优化模型的损失函数对车辆目标区域的画质进行优化输出优化图。本发明通过将画质优化模型中的损失函数设定为车辆reid模型结合reid损失函数、车辆分类模型结合分类损失函数中一种或两者结合,对隧道内数据进行质量优化,提升画质,主要为暗光增强,良好的画质,有助于提升检测/识别的精度。
技术研发人员:郭凯,方珊珊,钟俊,周智,李远玥,陈进,王冠斌,罗如意,林融冰,王晓东,吕悦
受保护的技术使用者:湖北省智慧交通研究院有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!