一种拖挂式房车车身缺陷视觉检测方法与流程
本发明涉及图像处理,具体涉及一种拖挂式房车车身缺陷视觉检测方法。
背景技术:
1、拖挂式房车是一种便携式的居住单位,由挂车以及车厢组成,通常用于野外露营和长途旅行,可提供一种移动型的住宿方式。拖挂式房车在生产过程中,车身表面可能由于运输、搬运、机械外力等外界环境因素造成车身质量缺陷。当车身质量存在缺陷时,可能引起房车的保温、隔热、隔音和防水这些方面出现问题,降低产品口碑,影响品牌质量,因此需要对生产的房车车身进行缺陷检测。
2、针对拖挂式房车进行车身缺陷检测的方式有很多,其中三维激光扫描、超声波检测、智能传感器检测等方式的精度较高,但是检测设备成本太高。数字图像的检测方式具有成本低,精度高的优点。在传统的数字图像检测车身表面缺陷时,通过数字相机和图像软件对车身表面进行拍摄获取车身数据,通过图像处理算法进行缺陷检测。其主要问题是忽略拍摄时车身表面反光区域的影响,并且仅通过图像rgb信息缺陷检测稳定性不高,本发明针对数字图像检测方法的主要问题进行改进,提高检测的精度和鲁棒性。
技术实现思路
1、为解决上述技术问题,本发明的目的在于提供一种拖挂式房车车身缺陷视觉检测方法,所采用的技术方案具体如下:
2、本发明一个实施例提供了一种拖挂式房车车身缺陷视觉检测方法,该方法包括以下步骤:
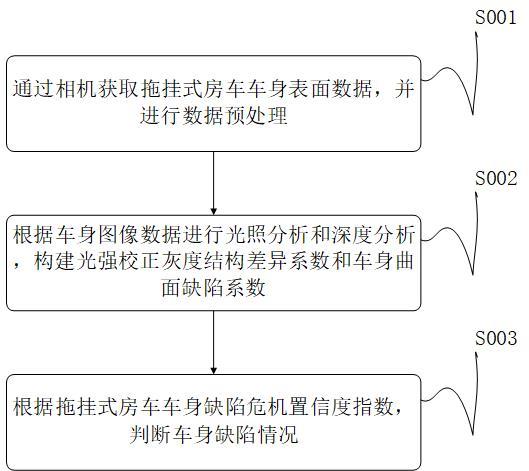
3、获取拖挂式房车车身表面的图像数据;
4、采用光照估计模型得到所述图像数据中各像素点的光照强度值;获取光照估计图;对光照估计图进行扁平化操作获取光照序列;根据光照序列中各点的光照强度值获取各点的车身光照突显系数;获取光照突显序列;将光照突显序列划分亮度突显区域、暗度突显区域及正常区域;根据亮度突显区域及暗度突显区域像素点的灰度值结合光照突显序列获取亮度突显区域及暗度突显区域像素点的灰度校正值;根据亮度突显区域、暗度突显区域像素点的灰度校正值以及正常区域像素点的灰度值获取灰度校正图;根据灰度校正图像素点的灰度分布获取车身光强校正灰度结构差异系数;根据车身光强校正灰度结构差异系数获取潜在缺陷区域;根据拖挂式房车车身表面的图像数据获取车身表面的曲面方程;根据车身表面的曲面方程获取潜在缺陷区域各像素点的车身曲面缺陷系数;
5、根据潜在缺陷区域各像素点的车身曲面缺陷系数及车身光强校正灰度结构差异系数获取拖挂式房车车身缺陷危机置信度;结合拖挂式房车车身缺陷危机置信度完成对车身缺陷的视觉检测。
6、优选的,所述根据光照序列中各点的光照强度值获取各点的车身光照突显系数,包括的具体方法为:
7、对于光照序列中的各点,将任一点作为待测点,计算剔除待测点后光照序列的光照强度的均值和标准差;计算待测点的光照强度与所述均值的差值;计算所述差值与所述标准差的比值;将所述比值与整个光照序列的光照强度均值的乘积作为待测点的车身光照突显系数。
8、优选的,所述将光照突显序列划分亮度突显区域、暗度突显区域及正常区域,包括的具体方法为:
9、将光照突显序列中车身光照突显系数从大到小进行排序;选取前车身光照突显系数对应的像素点划分到亮度突显区域;选取后车身光照突显系数对应的像素点划分到暗度突显区域;其余车身光照突显系数对应的像素点划分到正常区域;其中,为预设值。
10、优选的,所述根据亮度突显区域及暗度突显区域像素点的灰度值结合光照突显序列获取亮度突显区域及暗度突显区域像素点的灰度校正值,包括的具体方法为:
11、对于亮度突显区域和暗度突显区域的各像素点,计算光照突显序列的极值与255的比值,计算所述比值与各像素点的车身光照突显系数的乘积;将各像素点的灰度值与所述乘积的差值作为各像素点的灰度校正值。
12、优选的,所述根据灰度校正图像素点的灰度分布获取车身光强校正灰度结构差异系数,表达式为:
13、
14、式中,表示灰度校正图像中第个像素点对应的车身光强校正灰度结构差异系数,表示对比窗口在搜索框内滑动的次数,表示灰度校正图像中第个像素对应的中心矩阵,表示灰度校正图像中第个像素点对应的对比窗口在搜索框内第次滑动时的对比矩阵,表示矩阵的范数,为灰度校正图像。
15、优选的,所述根据车身光强校正灰度结构差异系数获取潜在缺陷区域,包括的具体方法为:
16、设定光强校正灰度结构差异系数阈值,将车身光强校正灰度结构差异系数大于光强校正灰度结构差异系数阈值的像素点划分到潜在缺陷区域中。
17、优选的,所述根据拖挂式房车车身表面的图像数据获取车身表面的曲面方程,具体方法为:
18、采用弹幕深度估计模型根据拖挂式房车车身表面的图像数据获取车身表面深度图;将获取的深度图进行泊松曲面重建,获取车身表面的曲面方程。
19、优选的,所述根据车身表面的曲面方程获取潜在缺陷区域各像素点的车身曲面缺陷系数,表达式为:
20、
21、式中,表示潜在缺陷区域中第个像素点的车身曲面缺陷系数,表示根据第个像素点划分曲面区域中像素点的个数,、分别表示第个像素点曲面区域对应像素点的最小横、纵坐标,、表示第个像素点曲面区域对应像素点的最大横、纵坐标,表示偏导函数,、分别表示、的偏导数。
22、优选的,所述根据潜在缺陷区域各像素点的车身曲面缺陷系数及车身光强校正灰度结构差异系数获取拖挂式房车车身缺陷危机置信度,具体方法为:
23、将潜在缺陷区域所有像素点车身曲面缺陷系数和车身光强校正灰度结构差异系数的乘积的均值作为拖挂式房车车身缺陷危机置信度。
24、优选的,所述结合拖挂式房车车身缺陷危机置信度完成对车身缺陷的视觉检测,具体方法为:
25、设定车身缺陷危机置信度阈值、,当车身缺陷危机置信度指数时,判定拖挂式房车车身状况良好;当车身缺陷危机置信度指数时,判定拖挂式房车车身存在轻微缺陷;当时,判定拖挂式房车车身缺陷严重。
26、本发明至少具有如下有益效果:
27、本实施例通过工业相机获取拖挂式房车车身图像数据,通过对车身图像进行光照强度估计,得到图像中的亮度和暗度区域,并对其进行光照补偿,构建车身光强校正灰度结构差异系数;与传统图像处理方式相比,考虑了环境中光照强度对车身图像数据的影响,提高了检测方法的鲁棒性。
28、同时,通过车身光强校正灰度结构差异系数设定阈值构建潜在缺陷序列,并结合车身图像深度信息得到潜在缺陷序列中对应像素点的车身曲面缺陷凹陷系数,最终得到拖挂式房车车身缺陷危机置信度指数。结合车身图像数据的深度信息,进一步提高检测算法的准确率。
技术特征:
1.一种拖挂式房车车身缺陷视觉检测方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的一种拖挂式房车车身缺陷视觉检测方法,其特征在于,所述根据光照序列中各点的光照强度值获取各点的车身光照突显系数,包括的具体方法为:
3.根据权利要求1所述的一种拖挂式房车车身缺陷视觉检测方法,其特征在于,所述将光照突显序列划分亮度突显区域、暗度突显区域及正常区域,包括的具体方法为:
4.根据权利要求1所述的一种拖挂式房车车身缺陷视觉检测方法,其特征在于,所述根据亮度突显区域及暗度突显区域像素点的灰度值结合光照突显序列获取亮度突显区域及暗度突显区域像素点的灰度校正值,包括的具体方法为:
5.根据权利要求1所述的一种拖挂式房车车身缺陷视觉检测方法,其特征在于,所述根据灰度校正图像素点的灰度分布获取车身光强校正灰度结构差异系数,表达式为:
6.根据权利要求1所述的一种拖挂式房车车身缺陷视觉检测方法,其特征在于,所述根据车身光强校正灰度结构差异系数获取潜在缺陷区域,包括的具体方法为:
7.根据权利要求1所述的一种拖挂式房车车身缺陷视觉检测方法,其特征在于,所述根据拖挂式房车车身表面的图像数据获取车身表面的曲面方程,具体方法为:
8.根据权利要求1所述的一种拖挂式房车车身缺陷视觉检测方法,其特征在于,所述根据车身表面的曲面方程获取潜在缺陷区域各像素点的车身曲面缺陷系数,表达式为:
9.根据权利要求1所述的一种拖挂式房车车身缺陷视觉检测方法,其特征在于,所述根据潜在缺陷区域各像素点的车身曲面缺陷系数及车身光强校正灰度结构差异系数获取拖挂式房车车身缺陷危机置信度,具体方法为:
10.根据权利要求1所述的一种拖挂式房车车身缺陷视觉检测方法,其特征在于,所述结合拖挂式房车车身缺陷危机置信度完成对车身缺陷的视觉检测,具体方法为:
技术总结
本发明涉及图像处理技术领域,提出了一种拖挂式房车车身缺陷视觉检测方法,包括:获取拖挂式房车车身表面的图像数据;估计各像素点的光照强度值;获取车身光照突显系数;根据车身光照突显度划分区域;获取区域像素点的灰度校正值;构建车身光强校正灰度结构差异系数获取潜在缺陷区域;对图像数据进行深度分析获取车身曲面缺陷系数;获取拖挂式房车车身缺陷危机置信度;从而完成对车身缺陷的视觉检测。本发明旨在解决传统图像处理中光照对车身图像数据的影响,提高检测算法的鲁棒性。
技术研发人员:张振汉,肖建华,刘喜龙,武娜
受保护的技术使用者:山东奥斯登房车有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!