一种无人驾驶配送车智慧管理方法及系统与流程
本发明涉及配送路径规划,具体涉及一种无人驾驶配送车智慧管理方法及系统。
背景技术:
1、无人驾驶配送是一种便捷、快速高效的新型配送方式,可以减轻城区末端配送压力,提高快递的配送效率,但在配送过程中,会受到局部区域特征与全局区域特征的影响,导致无法及时配送,配送的路径存在不确定性。
2、在现有技术中,为了优化配送路径,提高无人配送效率,可以采用粒子群优化算法等传统的路径规划算法进行优化,但使得无人驾驶配送车局部自主规划能力差、全局路径规划实时性差、容易陷入局部最优的问题,无法求得准确的最优解,路径规划的误差较大,对智能路线规划管理的效率和精度较差。
技术实现思路
1、为了解决现有技术中未考虑局部信息特征和全局信息特征变化情况,不能确定适当的惯性权重更新参数来规划最优路径的技术问题,本发明的目的在于提供一种无人驾驶配送车智慧管理方法及系统,所采用的技术方案具体如下:
2、本发明提出了一种无人驾驶配送车智慧管理方法,所述方法包括:
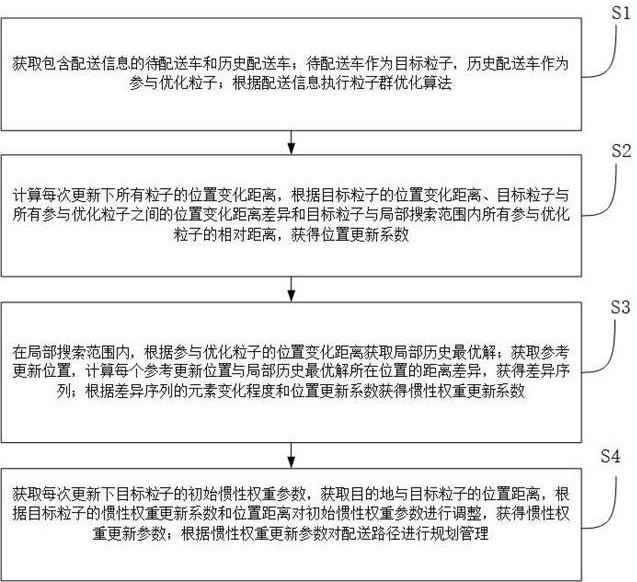
3、获取包含配送信息的待配送车和历史配送车;所述待配送车作为目标粒子,所述历史配送车作为参与优化粒子;根据所述配送信息执行粒子群优化算法;
4、计算每次更新下所有粒子的位置变化距离,根据所述目标粒子的位置变化距离、所述目标粒子与所有参与优化粒子之间的位置变化距离差异和所述目标粒子与局部搜索范围内所有参与优化粒子的相对距离,获得位置更新系数;
5、在局部搜索范围内,根据所述参与优化粒子的位置变化距离获取局部历史最优解;获取参考更新位置,计算每个所述参考更新位置与所述局部历史最优解所在位置的距离差异,获得差异序列;根据所述差异序列的元素变化程度和所述位置更新系数获得惯性权重更新系数;
6、获取每次更新下目标粒子的初始惯性权重参数,获取目的地与所述目标粒子的位置距离,根据所述目标粒子的所述惯性权重更新系数和所述位置距离对初始惯性权重参数进行调整,获得惯性权重更新参数;根据所述惯性权重更新参数对配送路径进行规划管理。
7、进一步地,所述位置更新系数包括:
8、在局部搜索范围内,计算所述目标粒子与所有参与优化粒子位置间的欧氏距离均值作为所述相对距离;
9、根据所述目标粒子的位置变化距离、所述位置变化距离差异和所述相对距离获得位置更新系数;
10、所述位置变化距离差异与所述位置更新系数为正相关关系,所述位置变化距离、所述相对距离与所述位置更新系数均为负相关关系。
11、进一步地,所述位置变化距离包括:
12、在每次更新下,计算粒子更新前后位置间的欧氏距离获得所述位置变化距离。
13、进一步地,所述局部历史最优解的获取方法包括:
14、在局部搜索范围内,所述参与优化粒子的位置变化距离最小时所处的位置,获取局部历史最优解。
15、进一步地,所述差异序列的获取方法包括:
16、获取所述目标粒子每次更新过程之前预设数量个已更新过程的位置作为所述参考更新位置;
17、计算所述参考更新位置与所述局部历史最优解所在位置的距离作为所述距离差异,将所述距离差异由大到小进行排序获得所述差异序列。
18、进一步地,所述惯性权重更新系数的获取方法包括:
19、所述元素变化程度包括第一元素变化程度和第二元素变化程度;
20、计算所述差异序列中极差,获得所述第一元素变化程度;
21、计算所述差异序列的均值和最小值的差异获得所述第二元素变化程度;
22、根据所述元素变化程度和所述位置更新系数获得惯性权重更新系数;
23、所述第一元素变化程度和所述第二元素变化程度均与所述惯性权重更新系数为正相关关系;所述位置更新系数与所述惯性权重更新系数为负相关关系。
24、进一步地,所述惯性权重更新参数的获取方法包括:
25、根据所述目标粒子与所述目的地的所述位置距离判断所述目标粒子的局部搜索范围是否为目标范围;
26、归一化所述惯性权重更新系数,若大于预设判断阈值,且所述目标粒子的局部搜索范围为所述目标范围,对所述初始惯性权重参数进行调小,若小于或者等于预设判断阈值,对所述初始惯性权重参数进行调大,获得所述惯性权重更新参数。
27、进一步地,所述根据所述目标粒子与所述目的地的所述位置距离判断所述目标粒子的局部搜索范围是否为目标范围的方法包括:
28、若所述位置距离小于或者等于所述目标粒子的局部搜索范围尺寸,则判断对应局部搜索范围为所述目标范围。
29、进一步地,所述预设判断阈值设置为0.3。
30、本发明还提出了一种无人驾驶配送车智慧管理系统,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现任意一项所述一种无人驾驶配送车智慧管理方法的步骤。
31、本发明具有如下有益效果:
32、本发明根据每次更新下目标粒子的位置变化距离、目标粒子与所有参与优化粒子间的位置变化距离差异和目标粒子与局部搜索范围内参与优化粒子的相对距离获得位置更新系数;可以判断目标粒子周围是否存在大量其他参与优化粒子的寻优路径,导致目标粒子的寻优效果不好,有陷入局部最优的可能;根据每个选取参考更新位置与局部历史最优解所在位置的距离差异获得差异序列的元素变化程度,确定目标粒子与局部历史最优解之间的位置关系,判断陷入局部最优的可能性,进而获得惯性权重更新系数;为了更高效寻找目标粒子的最优路径,获取每次更新下目标粒子的初始惯性权重参数,获取目的地与所述目标粒子的位置距离,根据目标粒子的惯性权重更新系数和位置距离对初始惯性权重参数进行调整,获得惯性权重更新参数对配送路径进行规划。本发明通过不断自适应调整目标粒子的惯性权重更新参数进行粒子群优化算法,进一步解决了目标粒子容易陷入局部最优的问题,提高了对路径规划管理的效率和准确性。
技术特征:
1.一种无人驾驶配送车智慧管理方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种无人驾驶配送车智慧管理方法,其特征在于,所述位置更新系数包括:
3.根据权利要求2所述的一种无人驾驶配送车智慧管理方法,其特征在于,所述位置变化距离包括:
4.根据权利要求1所述的一种无人驾驶配送车智慧管理方法,其特征在于,所述局部历史最优解的获取方法包括:
5.根据权利要求1所述的一种无人驾驶配送车智慧管理方法,其特征在于,所述差异序列的获取方法包括:
6.根据权利要求1所述的一种无人驾驶配送车智慧管理方法,其特征在于,所述惯性权重更新系数的获取方法包括:
7.根据权利要求1所述的一种无人驾驶配送车智慧管理方法,其特征在于,所述惯性权重更新参数的获取方法包括:
8.根据权利要求7所述的一种无人驾驶配送车智慧管理方法,其特征在于,所述根据所述目标粒子与所述目的地的所述位置距离判断所述目标粒子的局部搜索范围是否为目标范围的方法包括:
9.根据权利要求7所述的一种无人驾驶配送车智慧管理方法,其特征在于,所述预设判断阈值设置为0.3。
10.一种无人驾驶配送车智慧管理系统,所述系统包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1~9任意一项所述一种无人驾驶配送车智慧管理方法的步骤。
技术总结
本发明涉及配送路径规划技术领域,具体涉及一种无人驾驶配送车智慧管理方法及系统。该发明根据每次更新下目标粒子的位置变化距离、目标粒子与所有参与优化粒子间的位置变化距离差异和目标粒子与局部搜索范围内参与优化粒子的相对距离获得位置更新系数;根据选取参考更新位置与局部历史最优解所在位置的距离差异获得差异序列的元素变化程度;进而获得惯性权重更新系数;结合目的地与目标粒子的位置距离对每次更新下目标粒子的初始惯性权重参数进行调整,获得惯性权重更新参数对配送路径进行规划。本发明根据每次更新下目标粒子的位置变化特征对初始惯性权重参数进行调整,加快目标粒子路径的寻优效率,提高对无人驾驶配送车路径规划管理的准确性。
技术研发人员:杨扬,胡心怡
受保护的技术使用者:上海伯镭智能科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!