一种基于无人机全景模型的施工进度管控方法与流程
本发明涉及无人机拍摄,具体来说,涉及一种基于无人机全景模型的施工进度管控方法。
背景技术:
1、目前大部分施工单位针对项目的整体进度掌控是通过原材料的进场登记,通过综合分析钢筋及混凝土的用量结合施工经验进行统计。这种方法对于一般民建项目,施工技术含量不高,施工难度不大的情况还能基本解决,但是对于较大的工程项目想要快速、准确获取楼宇的施工进度信息难度较大,而且准确性得不到保障。
2、针对上述问题,目前还没有有效的解决办法。
技术实现思路
1、针对相关技术中的上述技术问题,本发明提出一种基于无人机全景模型的施工进度管控方法,能够克服现有技术的上述不足。
2、为实现上述技术目的,本发明的技术方案是这样实现的:
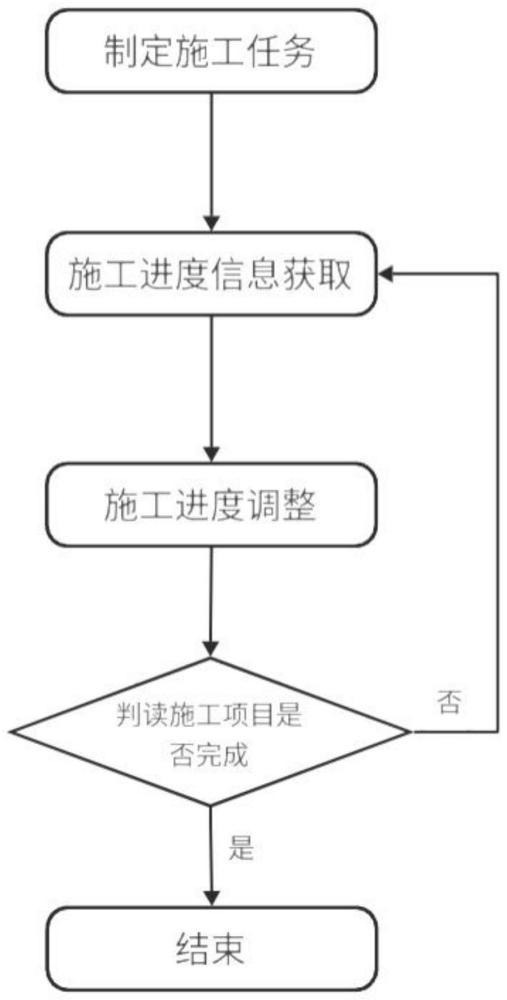
3、一种基于无人机全景模型的施工进度管控方法,包括如下步骤:
4、s1制定施工任务,在无人机倾斜摄影管理平台上上传需要进行施工的项目全景目标模型,并通过无人机倾斜摄影管理平台制定施工进度任务,即将项目全景目标模型拆分成多个阶段的全景任务子模型;
5、s2施工进度信息获取,在无人机倾斜摄影管理平台上对项目全景目标模型进行锚点设置,通过无人机定期获取现场相应阶段的施工信息并传输给无人机倾斜摄影管理平台,无人机倾斜摄影管理平台根据接收得数据信息构建当前施工全景模型,并与对应阶段的全景任务子模型进行进度对比分析;
6、s3施工进度调整,无人机倾斜摄影管理平台根据进度对比分析的信息,重新制定施工进度任务;
7、s4重复步骤s2-s3,直到施工项目完成。
8、进一步地,步骤s1中施工进度任务需要根据施工项目的规模、施工工期进行制定。
9、进一步地,步骤s2对无人机获取的施工信息进行处理,包括如下三种模式:
10、模式一:对项目全景目标模型进行若干个锚点设置,添加经纬度信息,通过经纬度信息结合无人机采集到的信息,定位到所需锚点位置并得到所需图像信息;
11、模式二:对项目全景目标模型进行原点设置,添加经纬度信息定位其他多个锚点,在已有原点绝对经纬度的情况下,通过矢量计算得到其他锚点的相对位置,结合无人机采集到的信息定位到所需锚点位置,并得到所需图像信息;
12、模式三:通过图像识别进行锚点定位,在无人机采集到的信息中定位到所需锚点位置并得到所需图像信息。
13、进一步地,模式一中添加的经纬度信息为绝对经纬度信息;模式二中添加的经纬度信息为相对经纬度信息。
14、进一步地,步骤s2中的无人机倾斜摄影管理平台通过无人机搭载多传感器获取测区影像信息,再通过建模软件获取建筑物顶面点云信息,最后结合python点云解析算法最终通过计算获取建筑物的实际高度。
15、进一步地,在制定每阶段的施工进度任务时,均设定有第一预警阈值和第二预警阀值;在进行每阶段的施工进度对比分析后,若当前施工进度超过相应阶段的施工进度任务一定值时,即超过第一预警阈值,无人机倾斜摄影管理平台会提示预警信息;若当前施工进度小于相应阶段的施工进度任务时,即小于第二预警阀值,无人机倾斜摄影管理平台会提示预警信息;若第二预警阀值≤当前施工进度≤第一预警阈值,则当前施工进度正常。
16、进一步地,步骤s2中的进度对比分析,分析结果通过无人机倾斜摄影管理平台以三维模型、图表和动画的形式可视化呈现。
17、本发明的有益效果:本发明利用无人机搭载多台传感器从不同角度对目标区域进行采集,高效快速的获取海量的数据信息,获得的数据可真实反应地物的外观、纹理、位置、高度等属性,能灵活、快速、准确的获取目标区域大规模点云数据,从而构建高精度模型;通过不同时期的全景模型的同一锚点位置图像进行对比,快速统计被测区内较高建筑物的施工进度,为施工进度的监测提供了强有力的帮助,该方法还可以更好的提升工程建设的质量及完工程度,提高工作效率和准确性,具有非常大实用价值。
技术特征:
1.一种基于无人机全景模型的施工进度管控方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于无人机全景模型的施工进度管控方法,其特征在于,步骤s1中施工进度任务需要根据施工项目的规模、施工工期进行制定。
3.根据权利要求1所述的基于无人机全景模型的施工进度管控方法,其特征在于,步骤s2对无人机获取的施工信息进行处理,包括如下三种模式:
4.根据权利要求3所述的基于无人机全景模型的施工进度管控方法,其特征在于,模式一中添加的经纬度信息为绝对经纬度信息;模式二中添加的经纬度信息为相对经纬度信息。
5.根据权利要求4所述的基于无人机全景模型的施工进度管控方法,其特征在于,步骤s2中的无人机倾斜摄影管理平台通过无人机搭载多传感器获取测区影像信息,再通过建模软件获取建筑物顶面点云信息,最后结合python点云解析算法最终通过计算获取建筑物的实际高度。
6.根据权利要求5所述的基于无人机全景模型的施工进度管控方法,其特征在于,在制定每阶段的施工进度任务时,均设定有第一预警阈值和第二预警阀值;在进行每阶段的施工进度对比分析后,若当前施工进度超过相应阶段的施工进度任务一定值时,即超过第一预警阈值,无人机倾斜摄影管理平台会提示预警信息;若当前施工进度小于相应阶段的施工进度任务时,即小于第二预警阀值,无人机倾斜摄影管理平台会提示预警信息;若第二预警阀值≤当前施工进度≤第一预警阈值,则当前施工进度正常。
7.根据权利要求1所述的基于无人机全景模型的施工进度管控方法,其特征在于,步骤s2中的进度对比分析,分析结果通过无人机倾斜摄影管理平台以三维模型、图表和动画的形式可视化呈现。
技术总结
本发明公开了一种基于无人机全景模型的施工进度管控方法,包括制定施工任务,施工进度信息获取,施工进度调整。利用无人机搭载多台传感器从不同角度对目标区域进行采集,高效快速的获取海量的数据信息,获得的数据可真实反应地物的外观、纹理、位置、高度等属性,能灵活、快速、准确的获取目标区域大规模点云数据,从而构建高精度模型;通过不同时期的全景模型的同一锚点位置图像进行对比,快速统计被测区内较高建筑物的施工进度,为施工进度的监测提供了强有力的帮助,该方法还可以更好的提升工程建设的质量及完工程度,提高工作效率和准确性,具有非常大实用价值。
技术研发人员:牛晓楠,牛俊永,李相虎,庞明亮,宋红景,胡文锋,薛情
受保护的技术使用者:中铁建设集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!