作业机械的作业完成率确定方法、装置及作业机械与流程
本发明涉及作业监控,尤其涉及一种作业机械的作业完成率确定方法、装置及作业机械。
背景技术:
1、目前市场上对垃圾车、清洁车、市政车辆、巡逻车等作业机械的作业里程、作业完成率进行监控的数字化监控系统,大多是将作业机械的gps轨迹点与系统中预先确定的作业路线进行匹配,来确定车辆的作业轨迹,这种方法可能会导致车辆在靠近某条作业路线上的非作业路线上行驶时,将gps轨迹点错误的匹配到这条作业路线,导致作业里程、作业完成率计算不准确。
技术实现思路
1、本发明提供一种作业机械的作业完成率确定方法、装置及作业机械,用以解决现有技术中通过作业机械的gps轨迹点与系统中预先确定的作业路线进行匹配,导致作业里程、作业完成率计算不准确的缺陷。
2、第一方面,本发明提供一种作业机械的作业完成率确定方法,包括:
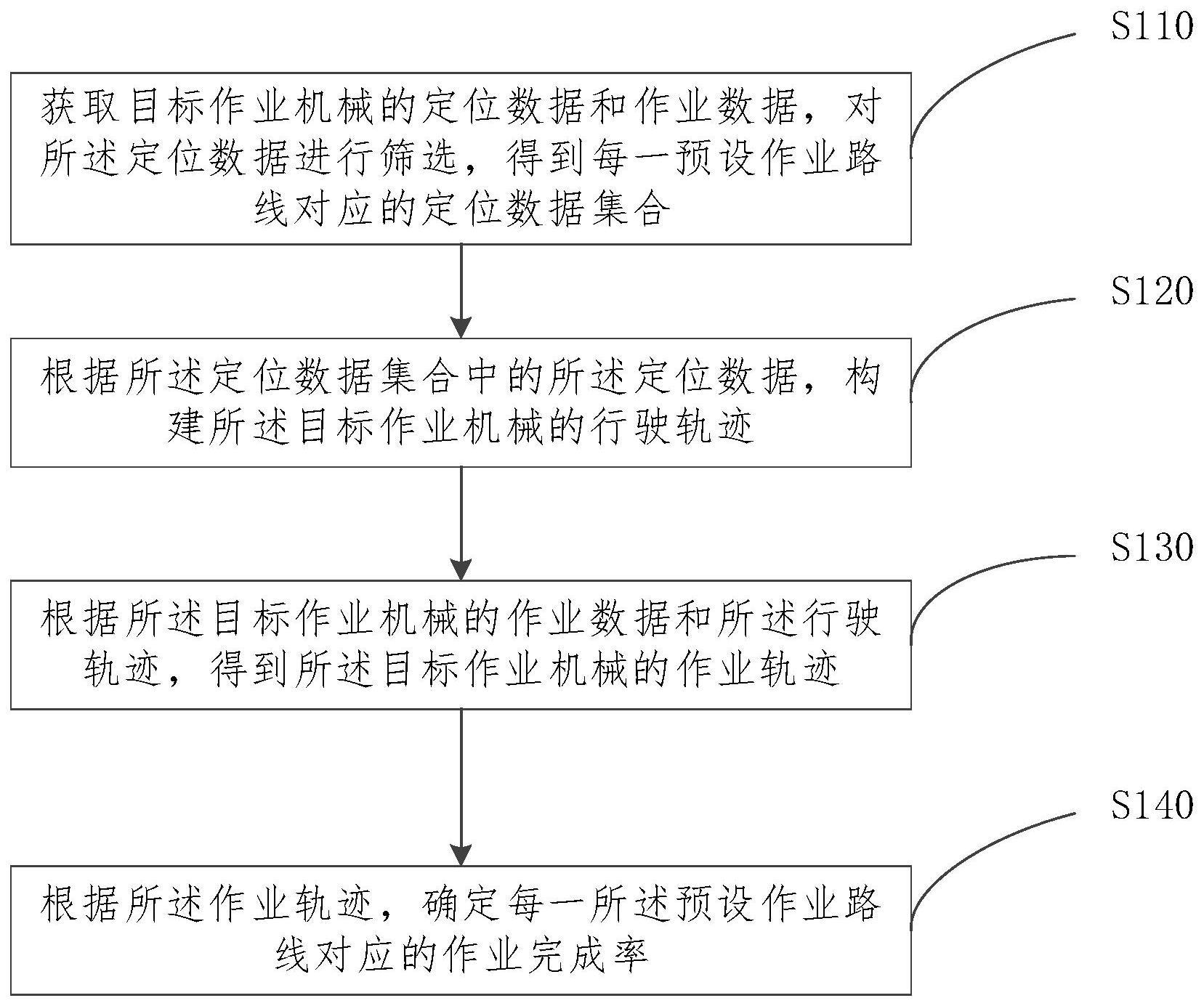
3、获取目标作业机械的定位数据和作业数据,对所述定位数据进行筛选,得到每一预设作业路线对应的定位数据集合;
4、根据所述定位数据集合中的所述定位数据,构建所述目标作业机械的行驶轨迹;
5、根据所述目标作业机械的作业数据和所述行驶轨迹,得到所述目标作业机械的作业轨迹;
6、根据所述作业轨迹,确定每一所述预设作业路线对应的作业完成率。
7、根据本发明提供的一种所述的作业机械的作业完成率确定方法,所述根据所述定位数据集合中的所述定位数据,构建所述目标作业机械的行驶轨迹,包括:
8、获取预设的路段数据;
9、根据所述定位数据和所述路段数据,基于隐马尔可夫模型路网匹配算法确定与所述定位数据集合对应的至少一目标路段;
10、对所述目标路段进行组合,得到所述目标作业机械的行驶轨迹。
11、根据本发明提供的一种所述的作业机械的作业完成率确定方法,所述根据所述定位数据和所述路段数据,基于隐马尔可夫模型路网匹配算法确定与所述定位数据集合对应的至少一目标路段,包括;
12、根据所述定位数据和所述路段数据,确定每一所述定位数据对应的候选路段;
13、确定所述定位数据与所述候选路段上预设的候选点之间的观测概率以及所述目标作业机械在所述候选路段之间转移的状态转移概率;
14、根据所述观测概率和所述状态转移概率,确定所述定位数据集合对应的至少一目标路段。
15、根据本发明提供的一种所述的作业机械的作业完成率确定方法,所述根据所述观测概率和所述状态转移概率,确定所述定位数据集合对应的至少一目标路段,包括:
16、将所述观测概率和所述状态转移概率带入预设动态规划算法,得到所述目标作业机械的最佳行驶路径对应的目标候选点;
17、对所述目标候选点对应的所述候选路段进行组合,确定所述定位数据集合对应的至少一目标路段。
18、根据本发明提供的一种所述的作业机械的作业完成率确定方法,所述根据所述目标作业机械的作业数据和所述行驶轨迹,得到所述目标作业机械的作业轨迹,包括:
19、根据所述目标作业机械的作业数据,确定与所述定位数据集合对应的目标作业数据;
20、根据所述目标作业数据,确定所述目标作业机械的作业开始时间和作业结束时间;
21、根据所述作业开始时间和所述作业结束时间对所述行驶轨迹进行插值处理,得到所述目标作业机械的作业轨迹。
22、根据本发明提供的一种所述的作业机械的作业完成率确定方法,所述根据所述目标作业数据,确定所述目标作业机械的作业开始时间和作业结束时间,包括:
23、根据所述目标作业数据,确定所述目标作业机械的作业状态;
24、根据所述作业状态,确定所述目标作业机械的作业开始时间和作业结束时间。
25、根据本发明提供的一种所述的作业机械的作业完成率确定方法,所述根据所述作业开始时间和所述作业结束时间对所述行驶轨迹进行插值处理,得到所述目标作业机械的作业轨迹,包括:
26、将所述作业开始时间和所述作业开始时间对应的路段数据代入预设的第一插值公式,得到所述目标作业机械的作业开始位置;
27、将所述作业结束时间和所述作业结束时间对应的路段数据代入预设的第二插值公式,得到所述目标作业机械的作业结束位置;
28、根据所述作业开始位置和所述作业结束位置,得到所述目标作业机械的作业轨迹。
29、根据本发明提供的一种所述的作业机械的作业完成率确定方法,所述对所述定位数据进行筛选,得到每一预设作业路线对应的定位数据集合,包括:
30、对所述定位数据进行筛选,得到与每一预设作业路线之间的距离小于预设距离阈值且时间差小于预设时间阈值的目标定位数据,将所有所述目标定位数据作为定位数据集合。
31、第二方面,本发明还提供一种作业机械的作业完成率确定装置,包括:
32、筛选模块,用于获取目标作业机械的定位数据和作业数据,对所述定位数据进行筛选,得到每一预设作业路线对应的定位数据集合;
33、行驶轨迹确定模块,用于根据所述定位数据集合中的所述定位数据,构建所述目标作业机械的行驶轨迹;
34、作业轨迹确定模块,用于根据所述目标作业机械的作业数据和所述行驶轨迹,得到所述目标作业机械的作业轨迹;
35、完成率确定模块,用于根据所述作业轨迹,确定每一所述预设作业路线对应的作业完成率。
36、第三方面,本发明还提供一种作业机械,包括作业机械本体,所述作业机械本体中设置有作业机械的作业完成率确定处理器;还包括存储器及存储在所述存储器上并可在所述作业机械的作业完成率确定处理器上运行的程序或指令,所述程序或指令被所述作业机械的作业完成率确定处理器执行时实现任一项所述作业机械的作业完成率确定方法的步骤。
37、本发明提供的作业机械的作业完成率确定方法、装置及作业机械,获取目标作业机械的定位数据和作业数据,对所述定位数据进行筛选,得到每一预设作业路线对应的定位数据集合;根据所述定位数据集合中的所述定位数据,构建所述目标作业机械的行驶轨迹;根据所述目标作业机械的作业数据和所述行驶轨迹,得到所述目标作业机械的作业轨迹;根据所述作业轨迹,确定每一所述预设作业路线对应的作业完成率。本发明通过定位数据集和作业数据确定目标作业机械的作业轨迹,近而确定作业完成率,避免将车辆在非作业路径上行驶的轨迹错误匹配到作业路线上,能够提高作业完成率的计算精度。
技术特征:
1.一种作业机械的作业完成率确定方法,其特征在于,包括:
2.根据权利要求1所述的作业机械的作业完成率确定方法,其特征在于,所述根据所述定位数据集合中的所述定位数据,构建所述目标作业机械的行驶轨迹,包括:
3.根据权利要求2所述的作业机械的作业完成率确定方法,其特征在于,所述根据所述定位数据和所述路段数据,基于隐马尔可夫模型路网匹配算法确定与所述定位数据集合对应的至少一目标路段,包括;
4.根据权利要求3所述的作业机械的作业完成率确定方法,其特征在于,所述根据所述观测概率和所述状态转移概率,确定所述定位数据集合对应的至少一目标路段,包括:
5.根据权利要求1所述的作业机械的作业完成率确定方法,其特征在于,所述根据所述目标作业机械的作业数据和所述行驶轨迹,得到所述目标作业机械的作业轨迹,包括:
6.根据权利要求5所述的作业机械的作业完成率确定方法,其特征在于,所述根据所述目标作业数据,确定所述目标作业机械的作业开始时间和作业结束时间,包括:
7.根据权利要求5所述的作业机械的作业完成率确定方法,其特征在于,所述根据所述作业开始时间和所述作业结束时间对所述行驶轨迹进行插值处理,得到所述目标作业机械的作业轨迹,包括:
8.根据权利要求1所述的作业机械的作业完成率确定方法,其特征在于,所述对所述定位数据进行筛选,得到每一预设作业路线对应的定位数据集合,包括:
9.一种作业机械的作业完成率确定装置,其特征在于,包括:
10.一种作业机械,其特征在于,包括作业机械本体,所述作业机械本体中设置有作业机械的作业完成率确定处理器;还包括存储器及存储在所述存储器上并可在所述作业机械的作业完成率确定处理器上运行的程序或指令,所述程序或指令被所述作业机械的作业完成率确定处理器执行时实现如权利要求1至8任一项所述作业机械的作业完成率确定方法的步骤。
技术总结
本发明提供一种作业机械的作业完成率确定方法、装置及作业机械,属于作业监控技术领域,方法包括获取目标作业机械的定位数据和作业数据,对所述定位数据进行筛选,得到每一预设作业路线对应的定位数据集合;根据所述定位数据集合中的所述定位数据,构建所述目标作业机械的行驶轨迹;根据所述目标作业机械的作业数据和所述行驶轨迹,得到所述目标作业机械的作业轨迹;根据所述作业轨迹,确定每一所述预设作业路线对应的作业完成率。本发明通过定位数据集和作业数据确定目标作业机械的作业轨迹,近而确定作业完成率,避免将车辆在非作业路径上行驶的轨迹错误匹配到作业路线上,能够提高作业完成率的计算精度。
技术研发人员:张志敏,谭永波
受保护的技术使用者:三一环境产业有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!