一种面向搜索任务的空域合并方法及装置与流程
本申请属于机载传感器管理,特别涉及一种面向搜索任务的空域合并方法及装置。
背景技术:
1、体系对抗环境下,空域信息瞬息万变,机会稍瞬即逝,需要传感器管理系统根据当前空中态势和任务决策科学合理地分配传感器资源,实际执行任务中面临的往往是多个并发的任务,在编队资源极其有限的情况下,如何充分利用编队内的有限资源,对所需搜索的未知空域任务进行最大覆盖,实现编队传感器资源利用率的最大化,对传感器管理中的空域搜索任务分配提出了挑战。
技术实现思路
1、为了解决上述问题,本申请提供了一种面向搜索任务的空域合并方法及装置,在编队资源有限的情况下,可充分利用传感器剩余能力,帮助作战无人机编队节省资源,提升空域搜索任务的完成率,实现对空中态势的及时有效感知。
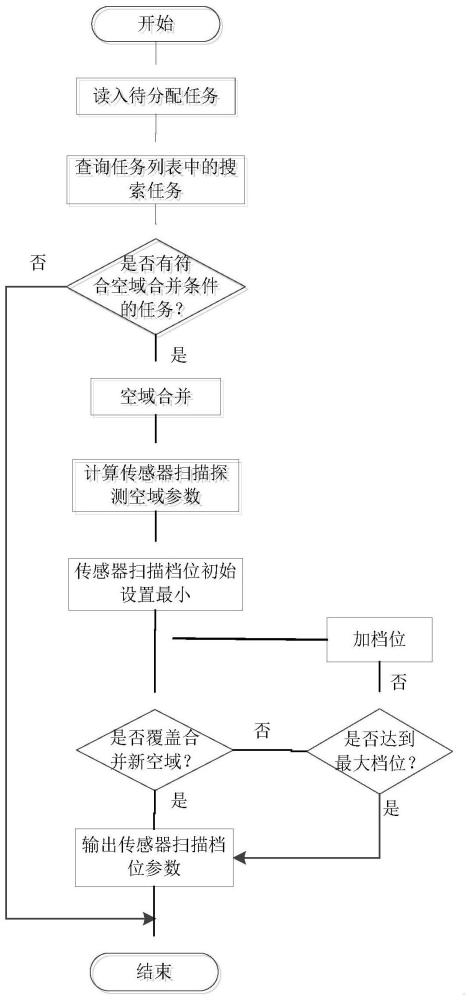
2、本申请第一方面提供了一种面向搜索任务的空域合并方法,主要包括:
3、步骤s1、依次遍历任务列表中的待分配的搜索任务及其执行平台;
4、步骤s2、确定所述执行平台在执行所述待分配的搜索任务时的传感器最大视野范围;
5、步骤s3、确定所述视野范围是否涵盖任务列表中其他待分配的搜索任务所对应的空域范围,如果是,则将该其他待分配的搜索任务加入到合并列表中;
6、步骤s4、将所述待分配的搜索任务与所述合并列表中其他待分配的搜索任务所对应的空域进行空域合并,以进行空域合并的所有空域的几何中心作为合并空域的传感器扫描中心,以待分配的搜索任务所对应的空域中心参数作为探测航路引导点;
7、步骤s5、确定能够覆盖所述合并空域的适配传感器扫描档位;
8、步骤s6、以合并空域的传感器扫描中心、探测航路引导点及适配的传感器扫描档位作为所述执行平台的新的搜索任务,重复上述步骤,直至所述任务列表中的待分配的搜索任务全部被遍历完成。
9、优选的是,步骤s1进一步包括:
10、自前向后依次遍历任务列表中的待分配的搜索任务及其执行平台;或自后向前依次遍历任务列表中的待分配的搜索任务及其执行平台。
11、优选的是,所述面向搜索任务的空域合并方法还包括:
12、通过自前向后依次遍历任务列表中的待分配的搜索任务及其执行平台,确定第一合并后的搜索任务及其执行平台,同时,通过自后向前依次遍历任务列表中的待分配的搜索任务及其执行平台,确定第二合并后的搜索任务及其执行平台,以执行平台数量最小作为最终的合并后的搜索任务及其执行平台。
13、优选的是,步骤s5进一步包括:
14、从最小搜索档位到最大搜索档位循环判断能够满足覆盖所述合并空域的适配传感器扫描档位。
15、本申请第二方面提供了一种面向搜索任务的空域合并装置,主要包括:
16、遍历模块,用于依次遍历任务列表中的待分配的搜索任务及其执行平台;
17、最大视野范围确定模块,用于确定所述执行平台在执行所述待分配的搜索任务时的传感器最大视野范围;
18、合并列表生成模块,用于确定所述视野范围是否涵盖任务列表中其他待分配的搜索任务所对应的空域范围,如果是,则将该其他待分配的搜索任务加入到合并列表中;
19、空域合并模块,用于将所述待分配的搜索任务与所述合并列表中其他待分配的搜索任务所对应的空域进行空域合并,以进行空域合并的所有空域的几何中心作为合并空域的传感器扫描中心,以待分配的搜索任务所对应的空域中心参数作为探测航路引导点;
20、传感器扫描档位确定模块,用于确定能够覆盖所述合并空域的适配传感器扫描档位;
21、搜索任务合并模块,用于以合并空域的传感器扫描中心、探测航路引导点及适配的传感器扫描档位作为所述执行平台的新的搜索任务;
22、重复执行上述模块,直至所述任务列表中的待分配的搜索任务全部被遍历完成。
23、优选的是,所述遍历模块包括:
24、前向遍历单元,用于自前向后依次遍历任务列表中的待分配的搜索任务及其执行平台;
25、后向遍历单元,用于自后向前依次遍历任务列表中的待分配的搜索任务及其执行平台。
26、优选的是,所述面向搜索任务的空域合并装置还包括:
27、最优执行平台确定模块,用于通过自前向后依次遍历任务列表中的待分配的搜索任务及其执行平台,确定第一合并后的搜索任务及其执行平台,同时,通过自后向前依次遍历任务列表中的待分配的搜索任务及其执行平台,确定第二合并后的搜索任务及其执行平台,以执行平台数量最小作为最终的合并后的搜索任务及其执行平台。
28、优选的是,所述传感器扫描档位确定模块包括:
29、档位调节单元,用于从最小搜索档位到最大搜索档位循环判断能够满足覆盖所述合并空域的适配传感器扫描档位。
30、本申请将单平台传感器能力细化,在搜索任务分配过程中,识别出具备同时执行多个任务能力的平台,并将多任务所包含的空域进行合并分配,以此提升编队内有限传感器资源与传感器能力的利用率以及任务的完成率,在保证任务执行效能最优的情况下实现资源的最大化利用。
技术特征:
1.一种面向搜索任务的空域合并方法,其特征在于,包括:
2.如权利要求1所述的面向搜索任务的空域合并方法,其特征在于,步骤s1进一步包括:
3.如权利要求1所述的面向搜索任务的空域合并方法,其特征在于,所述面向搜索任务的空域合并方法还包括:
4.如权利要求1所述的面向搜索任务的空域合并方法,其特征在于,步骤s5进一步包括:
5.一种面向搜索任务的空域合并装置,其特征在于,包括:
6.如权利要求5所述的面向搜索任务的空域合并装置,其特征在于,所述遍历模块包括:
7.如权利要求5所述的面向搜索任务的空域合并装置,其特征在于,所述面向搜索任务的空域合并装置还包括:
8.如权利要求5所述的面向搜索任务的空域合并装置,其特征在于,所述传感器扫描档位确定模块包括:
技术总结
本申请属于机载传感器管理技术领域,特别涉及一种面向搜索任务的空域合并方法及装置。该方法包括:步骤S1、依次遍历任务列表中的待分配的搜索任务及其执行平台;步骤S2、确定执行平台的传感器最大视野范围;步骤S3、确定视野范围是否涵盖任务列表中其他待分配的搜索任务所对应的空域范围,如果是,则将该搜索任务加入到合并列表中;步骤S4、将合并列表中的搜索任务所对应的空域进行空域合并;步骤S5、确定能够覆盖合并空域的适配传感器扫描档位;步骤S6、以合并空域的传感器扫描中心、探测航路引导点及适配的传感器扫描档位作为执行平台的新的搜索任务。本申请在保证任务执行效能最优的情况下实现资源的最大化利用。
技术研发人员:赵爽宇,刘雪,张少卿,高荷福
受保护的技术使用者:中国航空工业集团公司沈阳飞机设计研究所
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!