巡逻机器人的点云噪声过滤方法、装置、介质及设备与流程
本发明涉及机器人,尤其涉及巡逻机器人的点云噪声过滤方法、装置、介质及设备。
背景技术:
1、自主移动机器人是指具有自主寻找路径并行走能力的机器人,其通过激光雷达采集激光点云来判断行走过程中的障碍物。当自主移动机器人通过窄通道或者左右两侧距离障碍物较近时,受限于机器人壳体外形的影响,激光雷达会在障碍物和壳体之间产生点云噪声。这些点云噪声会导致机器人将障碍物与机器人之间的空闲区域错误识别为障碍物,进而导致机器人在一些狭窄通道等场景下无法正常通过。因此需要对这些点云噪声进行滤波处理。
2、现有的滤波处理方法包括但不限于体素滤波处理、统计滤波处理以及法向量滤波处理。其中,体素滤波处理是指将点云划分为一个个体素,比如三维网格,并将每个个体素内的点云均值作为该体素的代价点。统计滤波处理是根据每个点所在领域内的点的统计特征,比如平均值和标准差,判断点是否为利群点。法向量滤波处理是指根据点云中每个点的法向量来判断离群点。
3、然而,单一的滤波方法难以滤除上述窄通道或者左右两侧距离障碍物较近时所产生的点云噪声。其中,体素滤波通过计算每个三维网格内的点云均值来选取代表点云,其本质是一种降采样方法,缺点是可能会导致点云信息的丢失,一方面不能完全滤除点云噪声,另一方面会将细小障碍物完全滤除。而统计滤波和法向量滤波需要遍历激光雷达所采集到的每个激光点的相关信息,计算量大,难以实现导航过程中较高的实时性要求。
技术实现思路
1、本发明实施例提供了一种巡逻机器人的点云噪声过滤方法、装置、介质及设备,以解决现有技术在进行点云噪声滤除时存在的点云信息丢失、计算量大、实时性低的问题。
2、一种巡逻机器人的点云噪声过滤方法,所述方法包括:
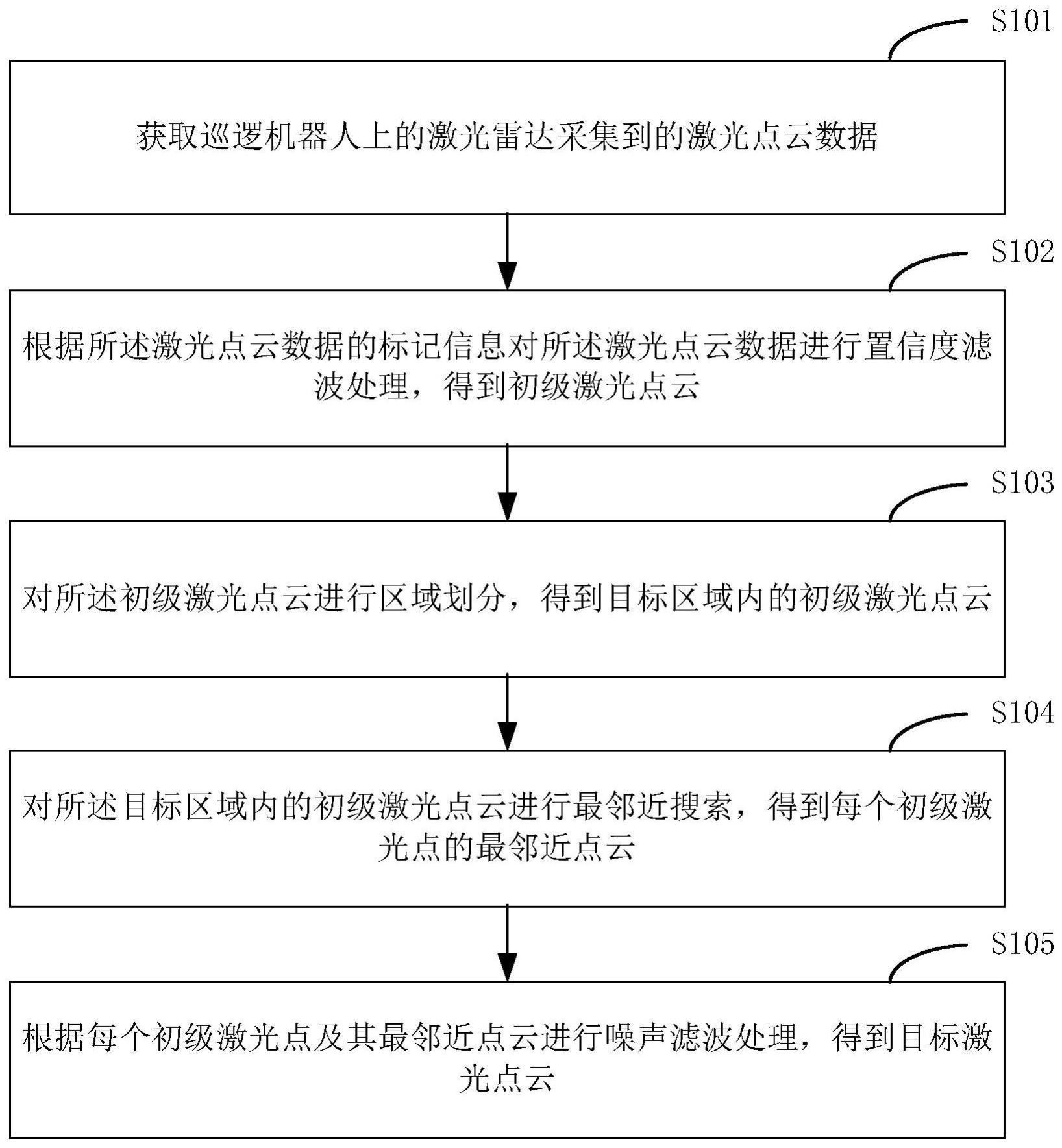
3、获取巡逻机器人上的激光雷达采集到的激光点云数据;
4、根据所述激光点云数据的标记信息对所述激光点云数据进行置信度滤波处理,得到初级激光点云;
5、对所述初级激光点云进行区域划分,得到目标区域内的初级激光点云;
6、对所述目标区域内的初级激光点云进行最邻近搜索,得到每个初级激光点的最邻近点云;
7、根据每个初级激光点及其最邻近点云进行噪声滤波处理,得到目标激光点云。
8、可选地,所述根据所述激光点云数据的标记信息对所述激光点云数据进行置信度滤波处理,得到初级激光点云包括:
9、遍历所述激光点云数据中的每一个激光点,获取所述激光点对应的标记信息中的噪点置信度;
10、当所述噪点置信度大于0时,过滤所述激光点;
11、当所述噪点置信度为0时,保留所述激光点。
12、可选地,所述对所述初级激光点云进行区域划分,得到目标区域内的初级激光点云包括:
13、遍历所述初级激光点云中的每一个初级激光点,根据所述初级激光点的横轴坐标和纵轴坐标计算正切值角度;
14、根据所述正切值角度获取预设方位上的初级激光点云;
15、对所述预设方位上的初级激光点云进行区域划分,得到目标区域内的初级激光点云。
16、可选地,所述对所述预设方位上的初级激光点云进行区域划分,得到目标区域内的初级激光点云包括:
17、获取构成目标区域对应的四个顶点坐标;
18、遍历所述预设方位上的初级激光点云中的每一个初级激光点,比较所述初级激光点的坐标信息与所述四个顶点坐标;
19、当所述初级激光点落在所述四个顶点坐标范围内时,保留所述初级激光点,否则过滤所述初级激光点。
20、可选地,所述目标区域为包含巡逻机器人的全部机身、并以巡逻机器人为中心的矩形区域。
21、可选地,所述对所述目标区域内的初级激光点云进行最邻近搜索,得到每个初级激光点的最邻近点云包括:
22、根据kd-tree最邻近搜索算法构建数据结构;
23、将所述目标矩形区域内的初级激光点云导入所述kd-tree最邻近搜索算法中,对每一初级激光点进行最邻近搜索;
24、获取每个初级激光点的周围最近邻的若干个激光点,构成所述初级激光点的最邻近点云。
25、可选地,所述根据每个初级激光点及其最邻近点云进行噪声滤波处理,得到目标激光点云包括:
26、对于每一个初级激光点及其最邻近点云,计算所述最邻近点云中的每个点与所述初级激光点之间的欧式距离,得到所述初级激光点的距离数组;
27、遍历所述初级激光点的距离数组内的每一个欧式距离,比较所述欧式距离与预设的距离阈值;
28、若所述欧式距离大于所述距离阈值,则将离散点数目加1,否则,保持离散点数目不变,获取下一个欧式距离进行比较;
29、当遍历完所述初级激光点的距离数组内的所有欧式距离时,比较所述离散点数目与预设的数目阈值;
30、若所述离散点数目大于所述数目阈值,则所述激光点为离散点,滤除所述初级激光点,否则,保留所述初级激光点。
31、一种巡逻机器人的点云噪声过滤装置,所述装置包括:
32、获取模块,用于获取巡逻机器人上的激光雷达采集到的激光点云数据;
33、置信度滤波模块,用于根据所述激光点云数据的标记信息对所述激光点云数据进行置信度滤波处理,得到初级激光点云;
34、区域划分模块,用于对所述初级激光点云进行区域划分,得到目标区域内的初级激光点云;
35、搜索模块,用于对所述目标区域内的初级激光点云进行最邻近搜索,得到每个初级激光点的最邻近点云;
36、噪声滤波模块,用于根据每个初级激光点及其最邻近点云进行噪声滤波处理,得到目标激光点云。
37、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的巡逻机器人的点云噪声过滤方法。
38、一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的巡逻机器人的点云噪声过滤方法。
39、本发明实施例通过获取巡逻机器人上的激光雷达采集到的激光点云数据;根据所述激光点云数据的标记信息对所述激光点云数据进行置信度滤波处理,得到初级激光点云,有利于快速去除明显异常点,减少后续点云噪声滤波的计算量;对所述初级激光点云进行区域划分,得到目标矩形区域内的初级激光点云;对所述目标区域内的初级激光点云进行最邻近搜索,得到每个初级激光点的最邻近点云;根据每个初级激光点及其最邻近点云进行噪声滤波处理,得到目标激光点云;可极大地减少点云噪声滤波的计算量,提高滤波效率以及实时性,且实现了在保留障碍物点云信息的基础上滤除点云噪声,避免了点云丢失的问题。
技术特征:
1.一种巡逻机器人的点云噪声过滤方法,其特征在于,包括:
2.如权利要求1所述的巡逻机器人的点云噪声过滤方法,其特征在于,所述根据所述激光点云数据的标记信息对所述激光点云数据进行置信度滤波处理,得到初级激光点云包括:
3.如权利要求1所述的巡逻机器人的点云噪声过滤方法,其特征在于,所述对所述初级激光点云进行区域划分,得到目标区域内的初级激光点云包括:
4.如权利要求3所述的巡逻机器人的点云噪声过滤方法,其特征在于,所述对所述预设方位上的初级激光点云进行区域划分,得到目标区域内的初级激光点云包括:
5.如权利要求4所述的巡逻机器人的点云噪声过滤方法,其特征在于,所述目标区域为包含巡逻机器人的全部机身、并以巡逻机器人为中心的矩形区域。
6.如权利要求1至5任一项所述的巡逻机器人的点云噪声过滤方法,其特征在于,所述对所述目标区域内的初级激光点云进行最邻近搜索,得到每个初级激光点的最邻近点云包括:
7.如权利要求1至5任一项所述的巡逻机器人的点云噪声过滤方法,其特征在于,所述根据每个初级激光点及其最邻近点云进行噪声滤波处理,得到目标激光点云包括:
8.一种巡逻机器人的点云噪声过滤装置,其特征在于,所述装置包括:
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的巡逻机器人的点云噪声过滤方法。
10.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的巡逻机器人的点云噪声过滤方法。
技术总结
本发明公开了一种巡逻机器人的点云噪声过滤方法,包括:获取巡逻机器人上的激光雷达采集到的激光点云数据;根据所述激光点云数据的标记信息对所述激光点云数据进行置信度滤波处理,得到初级激光点云;对所述初级激光点云进行区域划分,得到目标区域内的初级激光点云;对所述目标区域内的初级激光点云进行最邻近搜索,得到每个初级激光点的最邻近点云;根据每个初级激光点及其最邻近点云进行噪声滤波处理,得到目标激光点云。本发明极大地减少了点云噪声滤波的计算量,提高了滤波效率以及实时性,且实现了在保留障碍物点云信息的基础上滤除点云噪声,避免了点云丢失的问题。
技术研发人员:杨昆,柏林,刘彪,舒海燕,袁添厦,祝涛剑,沈创芸,王恒华,方映峰
受保护的技术使用者:广州高新兴机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!