基于改进YOLOv5算法的危化品车辆检测方法
本发明涉及目标检测,尤其涉及一种基于改进yolov5算法的危化品车辆检测方法。
背景技术:
1、随着危化品的生产、运输、使用越来越规范,各行各业对危化品的需求与日俱增。然而,危险化学品运输车辆事故频发,造成了严重的人员伤亡和财产损失,对环境安全和人体健康构成极大威胁,引起了社会的高度关注。由于危化品运输车辆数量日益增加、运输线路复杂,其安全难以保证,因此危化品运输车辆在行驶过程中的实时监测成为一个重要的研究方向。
2、目标检测作为计算机视觉领域的核心任务之一,旨在从图像或视频中自动识别指定的目标物体,并进行定位和分类。该技术的出现在危化品车辆检测方面带来了显著的好处。首先,它能够快速准确地识别危化品车辆,节省了大量人力资源和时间成本,提高检测效率。其次,通过自动化的过程,减少了人工干预的需求,降低了误判的风险,提高了检测的可靠性和准确性。除此之外,危化品车辆检测技术在实际应用中有着广泛的应用前景,特别是在交通管理、公共安全等领域。例如,在交通管理中,该技术可以用于实时检测危化品车辆,避免其进入市区或其他限制区域,从而保障城市居民的生命安全和财产安全;在公共安全领域,该技术可以用于监控和检测危化品车辆的行驶轨迹和运输线路,防止其被恐怖分子或其他人员利用进行破坏和攻击。
3、目前,车辆目标检测方法大致可以分为两类,即两阶段目标检测算法和单阶段目标检测算法。其中,choudhury等人提出了一种基于haar特征的级联算法进行车辆检测,该算法通过将视频帧中的多个感兴趣区域的haar特征组合成一个级联,使用分类器判断所对应的候选区域是否包含目标车辆。张富凯等人通过提出单阶段的深度神经网络df-yolov3模型实现对车辆的实时检测,该算法通过融合6个不同尺度的卷积特征图和残差网络中相应尺度的特征图,作为用来进行预测任务的特征金字塔完成车辆检测任务。王等人提出一种基于深度置信网络的车辆检测算法,通过设计并使用二阶平面作为输入的2d-dbn架构,利用双线性投影确定深度架构大小的方法来提高车辆检测的成功率。费等人针对网络对于未训练数据识别差的问题,以hashnet为基础,使用双线性模块替换原网络中的alexnet部分,提高模型的细粒度特征提取能力,然后通过匹配特征生成的哈希码和数据库中的哈希码实现对车辆的细粒度特征提取能力检测。尹等人提出一种基于特征融合和扩张卷积的单阶段多框检测器fd-ssd算法,该算法采用vgg-16作为主干网络提取特征的同时,使用可变形卷积网络更好的适应小物体形状。yawen等人提出通过尺度不变特征变换(the scale-invariant feature transform,sift)算法提取目标车辆的特征,结合高斯金字塔与滑动窗口机制,利用支持向量机对特征向量进行分类,最后采用非极大值抑制算法对目标车俩进行检测。liu等人提出ssd(single shot multibox detector,ssd)目标检测算法,该算法通过对特征提取网络各层输出的特征图进行分类与边框回归,融合了不同尺度的特征图以获取准确的目标位置。董等人提出一种改进的轻量型yolov5车辆检测算法,该算法在其颈部引入c3ghost和ghost模块,以减少特征通道融合过程中的浮点运算(flop)并增强特征表达能力。
4、尽管基于深度学习的目标检测算法在车辆检测领域已经取得了显著的突破,但是在实际应用中,车辆识别的高准确性和实时性仍然受到车辆重叠、目标过小的影响。因此,设计出一种检测精度高且计算开销低的危化品车辆检测算法势在必行。
技术实现思路
1、本发明目的在于提供针对传统车辆检测技术检测精度低、效率低以及维护成本高问题,提出了一种改进的危化品车辆检测方法,执行结果准确性更高。为实现上述目的,本发明提供如下技术方案:
2、一种基于改进yolov5算法的危化品车辆检测方法,包括如下步骤:
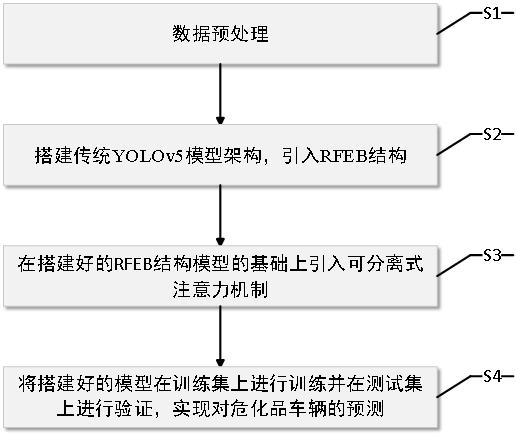
3、s1、对已获取到数据寄命名为hazardous vehicles,对其进行预处理,得到处理后的数据集包含oil truck、big truck、tiny truck、car四个类别。过使用标注工具lableme对图像进行标注,并将标注结果转换为文本格式,包括目标id、位置坐标及宽高信息。最后,按照6:2:2的比例划分数据集,分别用于训练、验证和测试模型;
4、s2、搭建传统yolov5模型架构,并在back bone部分引入rfeb(residual featureenhancement block)结构感受野扩展模块它采用膨胀的残差结构作为基块,并构建了局部和全局残差结构。通过组合多个rfeb结构,有效地扩大了感受野。在不同层级上,使用不同的扩张率进行扩张卷积,以匹配不同尺寸目标的检测需求;
5、s2.1、本发明的rfeb结构通过采用不同的扩张率来解决深层特征图中小物体消失的问题。具体而言,我们使用扩张率为1、2、3的基块作为rfeb结构的组成部分,并将其用于接收主干网络中有效特征层p3、p4、p5的输出。这种重新组织的结构能够有效地处理小物体的特征信息。
6、s3、在yolov5模型架构和rfeb结构后,引入可分离式注意力机制,通过将尺度感知、空间感知和任务感知的注意力机制统一到头部中,以提高head的感知能力和检测精度;
7、s3.1、在一阶段检测器中,采用了两次可分离式注意力机制的顺序叠加。每个注意力机制顺序包含尺度感知注意力模块、空间感知注意力模块和任务感知注意力模块。通过这种重新组织的方式,我们能够更好地利用注意力机制来提取特征,并在检测任务中取得更好的效果;
8、s4、利用搭建好的模型在训练集上进行训练并在测试集上进行验证,实现对危化品车辆的预测。
9、本发明的有益效果:
10、本发明的优点和效果在于面向危化品车辆检测算法,解决了检测器感受野与目标物体不匹配问题,以及提高了模型对危化品车辆特征的表达能力,具体表现为:
11、(1)在主干网络中,rfeb结构通过设计不同dilated convolution结构解决小物体和感受野在低分辨率特征图上的不匹配问题;
12、(2)在模型头部,本发明通过引入可分离式注意力机制,通过将尺度感知、空间感知和任务感知的注意力机制统一到头部中,以提高head的感知能力和检测精度。
技术特征:
1.一种基于改进yolov5算法的危化品车辆检测方法,其特征在于,包括如下步骤:
2.如权利要求1所述的基于改进yolov5算法的危化品车辆检测方法,其特征在于,所述步骤s1具体为:
3.如权利要求1所述的基于改进yolov5算法的危化品车辆检测方法,其特征在于,所述步骤s2具体为:
4.如权利要求3所述的基于改进yolov5算法的危化品车辆检测方法,其特征在于,所述步骤s2.1中,具有三个基本块rfeb结构公式描述为:
5.如权利要求1所述的基于改进yolov5算法的危化品车辆检测方法,其特征在于,所述步骤s3具体为:
6.如权利要求1所述的基于改进yolov5算法的危化品车辆检测方法,其特征在于,所述步骤s3中,可分离式注意力机制通过尺度感知、空间感知和任务感知注意力模块对特征图进行处理;尺度感知注意力模块增强了对前景物体尺度差异的敏感性,空间感知注意力模块关注前景物体在不同空间位置上的特征,任务感知注意力模块根据下游任务的需求形成不同的激活;这三个注意力机制顺序应用,并与原始特征向量f加权融合。
7.如权利要求1所述的基于改进yolov5算法的危化品车辆检测方法,其特征在于,所述步骤s4具体为:
技术总结
本发明公开了一种基于改进YOLOv5算法的危化品车辆检测方法,包括S1、对已获取到数据寄命名为Hazardous Vehicles,进行预处理,得到处理后的数据集划分为四个类别;S2、搭建传统YOLOv5模型架构,并在主干网络部分引入RFEB模块;S3、引入可分离式注意力机制,通过将尺度感知、空间感知和任务感知的注意力机制统一到头部中;S4、利用搭建好的模型在训练集上进行训练并在测试集上进行验证,实现对危化品车辆的预测。与现有技术相比,本发明在主干网络中,RFEB结构通过设计不同dilated convolution结构解决小物体和感受野在低分辨率特征图上的不匹配问题;在模型头部,通过引入可分离式注意力机制,通过将尺度感知、空间感知和任务感知的注意力机制统一到头部中,以提高Head的感知能力和检测精度。
技术研发人员:陈伯伦,王珊珊,刘步实,王凌,李哲,刘晓娈
受保护的技术使用者:淮阴工学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!