电动汽车滑行制动能量回收驾驶性预测模型及建模方法与流程
本发明涉及电动汽车测试,具体涉及一种电动汽车滑行制动能量回收驾驶性预测模型及建模方法。
背景技术:
1、电动汽车对能源的高效利用是发挥其节能和环保优势的关键,是解决环境污染和能源短缺问题最有效的途径和方法。自电动汽车诞生以来,其续航性能也一直是关注的重点,电动汽车为了利用这些宝贵的能量来提高续航里程,设计了一套可以将汽车前进的动能通过某种方式存储起来,并在需要时转化为动力供车辆使用的系统——滑行能量回收系统。
2、具体地,电动汽车滑行能量回收系统通过电机回馈转矩达到制动减速和能量再生的目的,在制动效能和经济性方面有先天优势,但由于制动过程中有电机驱动系统的加入,其在驾驶性评价方面与传统燃油车存在差异,并且,影响制动减速过程中驾驶性评价的因素也更加复杂。现有技术中,通常以驾驶员体验评价反馈操作感觉、驾驶舒适度等,或通过制动距离、制动强度、制动时间等客观参数来表征制动性,但由于个体驾驶习惯差异和主观偏见的存在,体验反馈结题一致性不高,而客观参数评价缺乏主观反馈,评价维度单一且存在指标局限,无法完全表征驾驶性。
技术实现思路
1、本发明意在提供一种电动汽车滑行制动能量回收驾驶性预测模型及建模方法,能够对滑行制动能量回收系统的驾驶性进行全面、准确的评价及表征,并且评价一致性较高。
2、为达到上述目的,本发明提供的基础方案为:
3、方案一
4、电动汽车滑行制动能量回收驾驶性预测模型的建模方法,包括以下步骤:
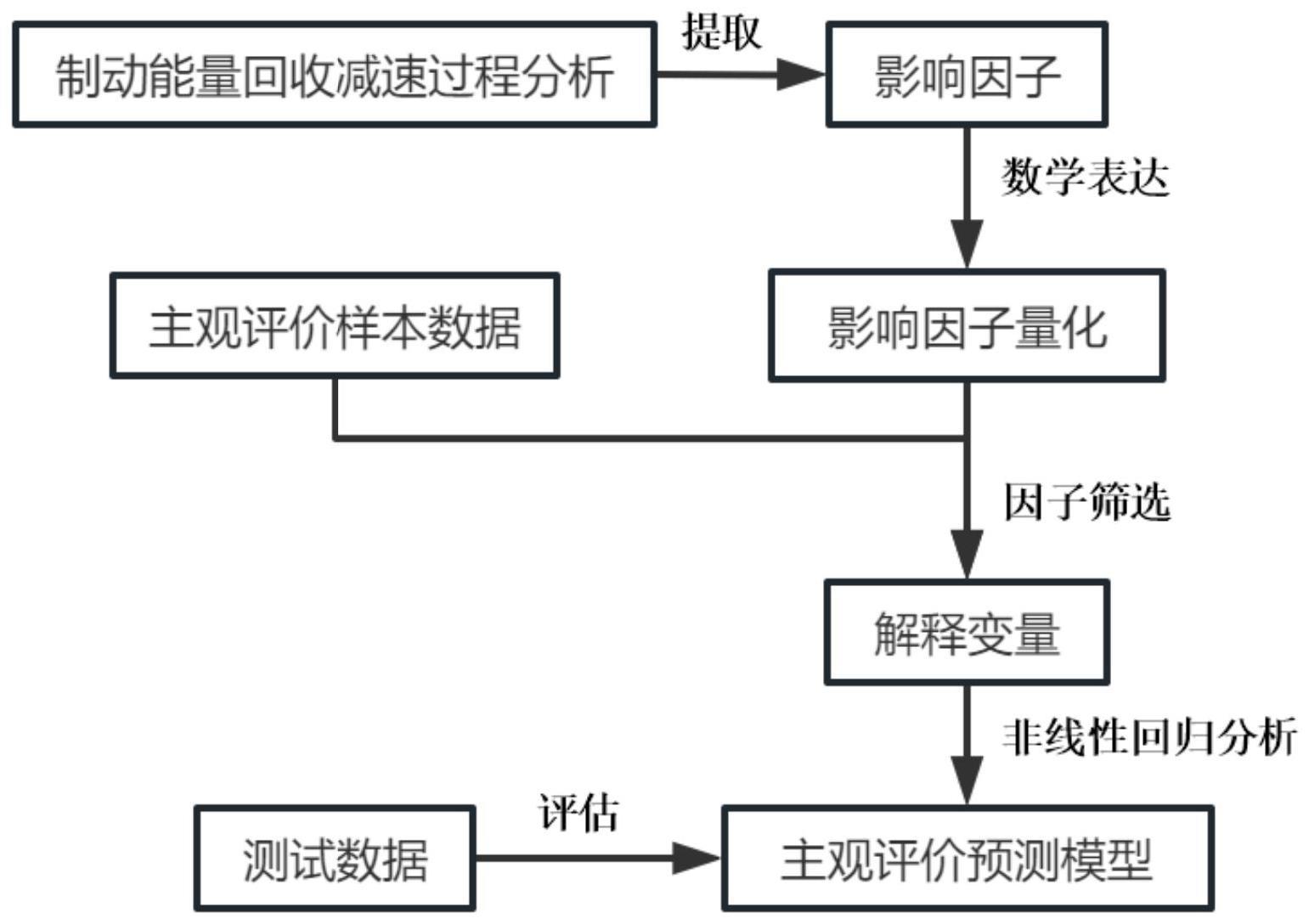
5、步骤1,分析电动汽车滑行能量回收系统的滑行制动过程,并从中提取出影响因子和主观评价样本数据;所述影响因子为与电动汽车滑行能量回收系统的滑行减速特性相关的特征指标;
6、步骤2,量化影响因子,并结合主观评价样本数据,进行影响因子筛选;
7、步骤3,建立主观评价预测模型,并将筛选得到的影响因子作为主观预测模型的解释变量;采用各解释变量优化主观评价预测模型,并得到最终的主观评价预测模型。
8、方案二
9、电动汽车滑行制动能量回收驾驶性预测模型,采用如方案一所述的电动汽车滑行制动能量回收驾驶性预测模型的建模方法建模得到;包括线性化模型:
10、其中,β1、β2、…、β7分别是最大减速度x1的一次项回归参数、最大减速度变化率x2的一次项回归参数、减速滑行距离x3的一次项回归参数、最大减速度x1的二次项回归参数、最大减速度变化率x2的二次项回归参数、减速滑行距离x3的二次项回归参数、减速度变化率稳态占比x4的回归参数,ε为扰动项。
11、本发明的工作原理及优点在于:
12、本方案中,提出了滑行制动过程中影响驾驶性的影响因子,并定义了影响因子的量化计算方法,再将量化的影响因子进行相关性分析,筛选出与主观评价结果高度相关的因子,最后通过非线性回归方法建立驾驶性主观评价预测模型,实现电动汽车能量回收过程中驾驶性的预测,解释比例可达到77%以上,模型拟合优度良好。其中,本方案基于与电动汽车滑行能量回收系统的滑行减速特性相关的特征指标(影响因子),并结合主观评价样本数据,进行主观评价预测模型构建,能够充分且全面地考量主观和客观两个维度的数据,能够对滑行制动能量回收系统的驾驶性进行全面、准确的评价及表征,评价一致性较高。
技术特征:
1.电动汽车滑行制动能量回收驾驶性预测模型的建模方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的电动汽车滑行制动能量回收驾驶性预测模型的建模方法,其特征在于,还包括步骤4:将测试数据输入主观评价预测模型,对主观评价预测模型进行评估。
3.根据权利要求1所述的电动汽车滑行制动能量回收驾驶性预测模型的建模方法,其特征在于,所述主观评价样本数据包括减速强度评价数据、减速响应评价数据和减速冲击评价数据。
4.根据权利要求3所述的电动汽车滑行制动能量回收驾驶性预测模型的建模方法,其特征在于,所述影响因子包括与减速强度评价数据对应的最大减速度amax、减速度极差ra、减速度均方根arms;与减速响应评价数据对应的达到减速度拐点所需时间、减速滑行距离;与减速冲击评价数据对应的最大减速度变化率jmax、减速度变化率极差rj、减速度变化率均方根jmax、减速度变化率稳态占比jsteady ration。
5.根据权利要求4所述的电动汽车滑行制动能量回收驾驶性预测模型的建模方法,其特征在于,在量化影响因子时,按照下式进行量化:
6.根据权利要求1所述的电动汽车滑行制动能量回收驾驶性预测模型的建模方法,其特征在于,在进行影响因子筛选时,通过相关性分析法进行筛选;所述相关性分析法包括以下子步骤:
7.根据权利要求6所述的电动汽车滑行制动能量回收驾驶性预测模型的建模方法,其特征在于,所述解释变量的筛选条件包括:选取相关性分析法中相关系数≥0.8的影响因子作为解释变量。
8.根据权利要求6所述的电动汽车滑行制动能量回收驾驶性预测模型的建模方法,其特征在于,步骤3中,建立的主观评价预测模型为:
9.根据权利要求8所述的电动汽车滑行制动能量回收驾驶性预测模型的建模方法,其特征在于,步骤3中,最终的主观评价预测模型为:
10.电动汽车滑行制动能量回收驾驶性预测模型,其特征在于,采用如权利要求1-9任一项所述的电动汽车滑行制动能量回收驾驶性预测模型的建模方法建模得到;包括线性化模型:其中,β1、β2、…、β7分别是最大减速度x1的一次项回归参数、最大减速度变化率x2的一次项回归参数、减速滑行距离x3的一次项回归参数、最大减速度x1的二次项回归参数、最大减速度变化率x2的二次项回归参数、减速滑行距离x3的二次项回归参数、减速度变化率稳态占比x4的回归参数,ε为扰动项。
技术总结
本发明涉及电动汽车测试技术领域,公开了一种电动汽车滑行制动能量回收驾驶性预测模型及建模方法,包括以下步骤:步骤1,分析电动汽车滑行能量回收系统的滑行制动过程,并从中提取出影响因子和主观评价样本数据;所述影响因子为与电动汽车滑行能量回收系统的滑行减速特性相关的特征指标;步骤2,量化影响因子,并结合主观评价样本数据,进行影响因子筛选;步骤3,建立主观评价预测模型,并将筛选得到的影响因子作为主观预测模型的解释变量;采用各解释变量优化主观评价预测模型,并得到最终的主观评价预测模型。本发明能够对滑行制动能量回收系统的驾驶性进行全面、准确的评价及表征,并且评价一致性较高。
技术研发人员:易侃,黄俊富,李朝斌,张强,陈罗
受保护的技术使用者:中国汽车工程研究院股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!