毫米波雷达仿真模型参数敏感性评价方法与流程
本发明涉及自动驾驶仿真领域,特别涉及毫米波雷达仿真模型参数敏感性评价方法。
背景技术:
1、车载毫米波雷达有着精确探测目标距离和速度的能力,对恶劣天气的适应能力强,因而在自动驾驶的环境感知系统中起重要作用。现有自动驾驶模拟仿真平台通常提供有大量毫米波雷达仿真模型,为了使其具备实际应用价值,需要对毫米波雷达仿真模型的真实性进行验证。
2、在实现本发明的过程中,申请人发现现有技术存在以下技术问题:
3、现有技术对毫米波雷达仿真模型参数敏感性评价方法,仅通过毫米波雷达建模与真实毫米波雷达之间输出参数的数据一致性进行单一评价,而毫米波雷达仿真模型往往具有多个建模参数,这些参数对于毫米波雷达仿真模型的物理特性真实性的影响程度,需要进行量化的评价才有助于指导毫米波雷达建模的进一步优化。
技术实现思路
1、为了解决现有技术存在的上述问题,本发明提供了一种毫米波雷达仿真模型参数敏感性评价方法,根据真实毫米波雷达数据和仿真毫米波雷达数据确定毫米波雷达仿真模型的保真度,并根据保真度,采用基于方差的敏感性分析方法对各个敏感性分析输入参数进行分析,量化得到各个敏感性分析输入参数对应的一阶影响指数和总效应指数,并以此评估各个敏感性分析输入参数对毫米波雷达仿真模型的保真度影响程度。本发明提供的技术方案如下:
2、根据本发明实施例的一个方面,提供一种毫米波雷达仿真模型参数敏感性评价方法,其特征在于,所述方法包括:
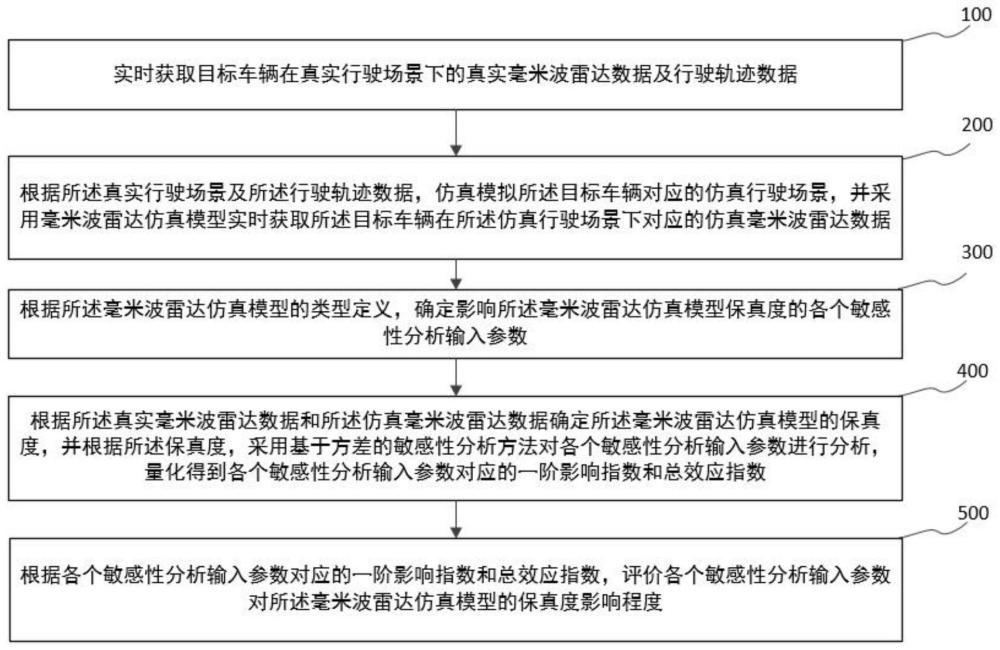
3、实时获取目标车辆在真实行驶场景下的真实毫米波雷达数据及行驶轨迹数据;
4、根据所述真实行驶场景及所述行驶轨迹数据,仿真模拟所述目标车辆对应的仿真行驶场景,并采用毫米波雷达仿真模型实时获取所述目标车辆在所述仿真行驶场景下对应的仿真毫米波雷达数据;
5、根据所述毫米波雷达仿真模型的类型定义,确定影响所述毫米波雷达仿真模型保真度的各个敏感性分析输入参数;
6、根据所述真实毫米波雷达数据和所述仿真毫米波雷达数据确定所述毫米波雷达仿真模型的保真度,并根据所述保真度,采用基于方差的敏感性分析方法对各个敏感性分析输入参数进行分析,量化得到各个敏感性分析输入参数对应的一阶影响指数和总效应指数;
7、根据各个敏感性分析输入参数对应的一阶影响指数和总效应指数,评价各个敏感性分析输入参数对所述毫米波雷达仿真模型的保真度影响程度。
8、在一个优选的实施例中,所述真实毫米波雷达数据包括目标车辆在所述真实行驶场景下相对真实毫米波雷达的径向距离、速度值和方位角值中的至少一种;所述仿真毫米波雷达数据包括目标车辆在所述仿真行驶场景下相对所述仿真毫米波雷达的径向距离、速度值和方位角值中的至少一种;且,所述真实毫米波雷达数据与所述仿真毫米波雷达数据包括的数据类型匹配。
9、在一个优选的实施例中,所述根据所述真实毫米波雷达数据和所述仿真毫米波雷达数据确定所述毫米波雷达仿真模型的保真度的步骤,包括:
10、当所述真实毫米波雷达数据和所述仿真毫米波雷达数据包括的数据类型均为径向距离时,根据二者径向距离的欧式距离值确定所述毫米波雷达仿真模型的保真度;
11、当所述真实毫米波雷达数据和所述仿真毫米波雷达数据包括的数据类型均为速度值时,根据二者速度值的速度差值绝对值确定所述毫米波雷达仿真模型的保真度;
12、当所述真实毫米波雷达数据和所述仿真毫米波雷达数据包括的数据类型均为方位角值时,根据二者方位角值差值的余弦值确定所述毫米波雷达仿真模型的保真度;
13、当所述真实毫米波雷达数据和所述仿真毫米波雷达数据包括的数据类型包括径向距离、速度值和方位角值中的任意组合时,根据二者径向距离、速度值或方位角值确定对应的欧式距离值、速度差值绝对值、或余弦值,并根据各数据类型对应的预设权重,共同确定所述毫米波雷达仿真模型的保真度。
14、在一个优选的实施例中,所述毫米波雷达仿真模型对应的雷达方程包括雷达自身性能输入参数及外部环境输入参数。
15、在一个优选的实施例中,所述毫米波雷达仿真模型的类型为基于理想模型的毫米波雷达模型,其对应的雷达方程表达式如公式1:
16、
17、其中,pr为雷达接收到回波信号的回波功率,pt为雷达的发射功率,g为雷达的发射端和接收端增益,λ为雷达发射电磁波的波长,σ为目标物的反射截面积,r为目标物与雷达之间的距离,l为雷达整体系统损失系数。
18、在一个优选的实施例中,所述毫米波雷达仿真模型和所述目标车辆在所述仿真行驶场景中的相对位置关系,与所述毫米波雷达和所述目标车辆在所述真实行驶场景下的相对位置关系相匹配。
19、在一个优选的实施例中,所述目标车辆在真实行驶场景下绕圈行驶。
20、与现有技术相比,本发明提供的一种毫米波雷达仿真模型参数敏感性评价方法具有以下优点:
21、本发明提供的毫米波雷达仿真模型参数敏感性评价方法,通过实时获取目标车辆在真实行驶场景下的真实毫米波雷达数据及行驶轨迹数据;根据真实行驶场景及行驶轨迹数据,仿真模拟目标车辆对应的仿真行驶场景,并采用毫米波雷达仿真模型实时获取目标车辆在仿真行驶场景下对应的仿真毫米波雷达数据;根据毫米波雷达仿真模型的类型定义,确定影响毫米波雷达仿真模型保真度的各个敏感性分析输入参数;根据真实毫米波雷达数据和仿真毫米波雷达数据确定毫米波雷达仿真模型的保真度,并根据保真度,采用基于方差的敏感性分析方法对各个敏感性分析输入参数进行分析,量化得到各个敏感性分析输入参数对应的一阶影响指数和总效应指数;根据各个敏感性分析输入参数对应的一阶影响指数和总效应指数,评价各个敏感性分析输入参数对毫米波雷达仿真模型的保真度影响程度,从而在实现毫米波雷达仿真模型保真度评估的同时,还实现毫米波雷达仿真模型中各敏感性分析输入参数对其保真度的影响评估。
技术特征:
1.一种毫米波雷达仿真模型参数敏感性评价方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述真实毫米波雷达数据包括目标车辆在所述真实行驶场景下相对真实毫米波雷达的径向距离、速度值和方位角值中的至少一种;所述仿真毫米波雷达数据包括目标车辆在所述仿真行驶场景下相对所述仿真毫米波雷达的径向距离、速度值和方位角值中的至少一种;且,所述真实毫米波雷达数据与所述仿真毫米波雷达数据包括的数据类型匹配。
3.根据权利要求2所述的方法,其特征在于,所述根据所述真实毫米波雷达数据和所述仿真毫米波雷达数据确定所述毫米波雷达仿真模型的保真度的步骤,包括:
4.根据权利要求1所述的方法,其特征在于,所述毫米波雷达仿真模型对应的雷达方程包括雷达自身性能输入参数及外部环境输入参数。
5.根据权利要求1所述的方法,其特征在于,所述毫米波雷达仿真模型的类型为基于理想模型的毫米波雷达模型,其对应的雷达方程表达式如公式1:
6.根据权利要求1所述的方法,其特征在于,所述毫米波雷达仿真模型和所述目标车辆在所述仿真行驶场景中的相对位置关系,与所述毫米波雷达和所述目标车辆在所述真实行驶场景下的相对位置关系相匹配。
7.根据权利要求1所述的方法,其特征在于,所述目标车辆在真实行驶场景下绕圈行驶。
技术总结
本发明公开了一种毫米波雷达仿真模型参数敏感性评价方法,涉及自动驾驶仿真领域。本发明提供的方法,根据真实毫米波雷达数据和仿真毫米波雷达数据确定毫米波雷达仿真模型的保真度,并根据保真度,采用基于方差的敏感性分析方法对各个敏感性分析输入参数进行分析,量化得到各个敏感性分析输入参数对应的一阶影响指数和总效应指数,并以此评估各个敏感性分析输入参数对毫米波雷达仿真模型的保真度影响程度,从而在实现毫米波雷达仿真模型保真度评估的同时,还实现毫米波雷达仿真模型中各敏感性分析输入参数对其保真度的影响评估。
技术研发人员:王浩宇,邓伟文,王莹,丁娟,刘美江
受保护的技术使用者:浙江天行健智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!