一种基于激光点云正投影的船闸禁停区船舶目标检测方法与流程
本发明涉及水运交通,具体地指一种基于激光点云正投影的船闸禁停区船舶目标检测方法。
背景技术:
1、随着云计算、自动驾驶技术的蓬勃发展,激光雷达等传感器的成熟应用,船舶检测数字化、智能化成为发展趋势。然而,道路与室内环境是平直型区域,而船闸是深槽型区域,对激光雷达而言,目标在平直型区域运动,其遮挡、残缺与点云的稀疏程度等属性变化主要来自于头尾方向,而目标在深槽型区域上下运动时意味着这些属性变化主要来自于竖直方向上,这种不同意味着很多现有方法将不适用。因此对深槽型区域,尤其在大落差的船闸场景下的激光点云船舶目标检测成为极大的挑战。
2、目前应用较为广泛的点云检测算法pointrcnn、pv-rcnn、parta2-net等在常见场景下性能尚可,但对于船闸此类深槽型区域性能移植性差,并且此类算法直接对点云进行检测,检测速度慢,硬件部署难。
3、综上所述,在船闸禁停区,研究一种稳定,部署简易,检测速度快,准确性高的激光点云船舶目标检测方法迫在眉睫。
技术实现思路
1、本发明的目的在于克服上述不足,提供一种部署简易、检测速度快、准确性高的基于激光点云正投影的船闸禁停区船舶目标检测方法,以解决背景技术中提出的问题。
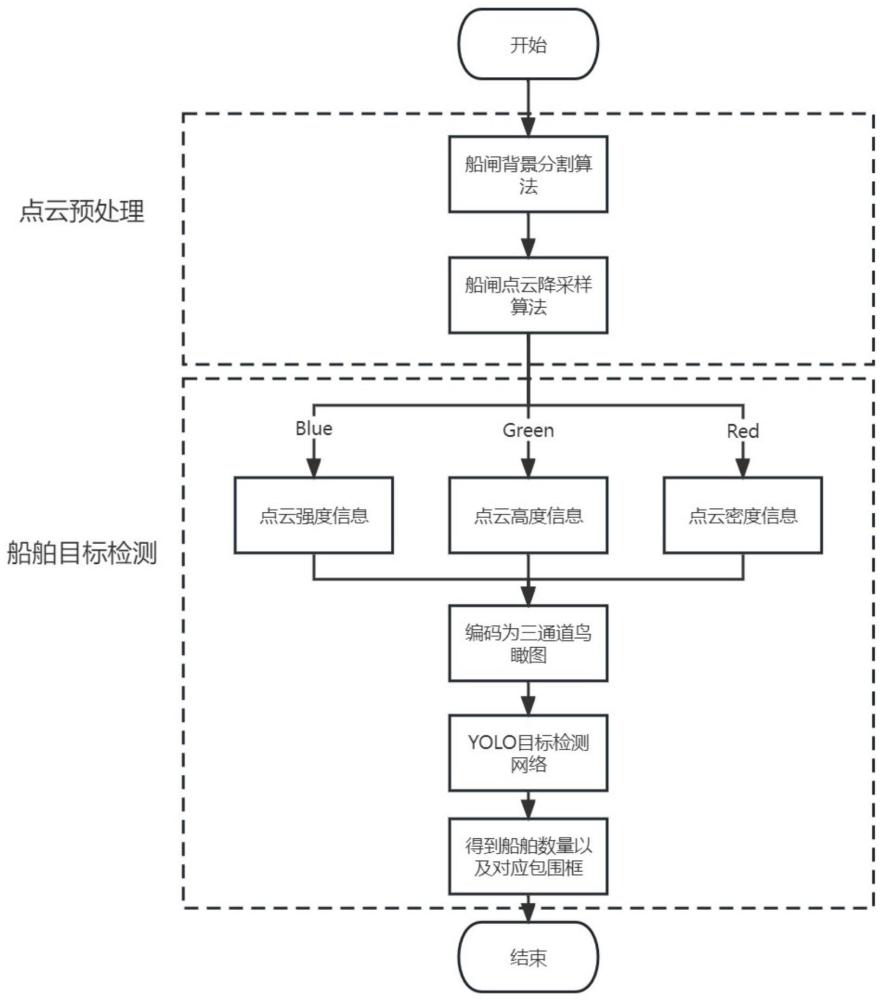
2、本发明为解决上述技术问题,所采用的技术方案是:一种基于激光点云正投影的船闸禁停区船舶目标检测方法,它包括以下步骤:
3、步骤s1:通过船闸背景分割算法得到船闸禁停区域点云;
4、步骤s2:通过船闸点云降采样算法减少点云数量并获得更加均匀的船舶点云;
5、步骤s3:通过人工设计的特征将点云数据转为鸟瞰图;
6、步骤s4:将鸟瞰图作为yol0的输入,输出船舶数量以及船舶包围框。
7、优选地,所述步骤s1的具体方法包括以下子步骤:
8、s11:获取船闸水位值water_height、两个闸壁的平面信息flat1,flat2;
9、s12:以(flat1,flat2)为有效区域,将点云坐标信息在有效区域之外的点去除,得到滤除闸壁的船舶点云;
10、s13:以(water_height,zmax)为有效区域,将点云坐标信息在有效区域之外的点去除,得到滤除水面的船舶点云,其中zmax为z方向的最大值。
11、优选地,所述步骤s2的具体方法包括以下子步骤:
12、s21:取点云数据x方向、y方向、z方向的最大值及最小值,记为xmin,xmax,ymin,ymax,zmin,zmax;
13、s22:以(xmin,xmax),(ymin,ymax),(zmin,zmax)为边界,分辨率为参数,建立船闸点云栅格;
14、s23:以每个船闸栅格为单位,计算栅格内所有点的均值作为结果。
15、优选地,所述步骤s3的具体方法为:
16、三通道信息分别由点云强度信息、点云高度信息、点云密度信息编码得到,编码方式如下:
17、我们定义在roi区域内的点云集合为:
18、pω=p={[x,y,z]t|x∈(xmin,xmax),y∈(ymin,ymax),z∈(zmin,zmax)}#,其中(xmin,xmax),(ymin,ymax),(zmin,zmax)为原点云三个维度的筛选阈值区间;
19、将点云数据在xoy平面上进行网格化,其中每一个网格sij都为鸟瞰图(rgb)中的一个像素;我们定义属于网格sij内的点云集合为:
20、
21、其中i为任意正整数;
22、dx=(xmax-xmin)/width,dy=(ymax-ymin)/height#
23、width,height分别为鸟瞰图的宽和高;
24、则鸟瞰图的每一个通道编码:
25、
26、
27、
28、其中为网格sij内的点云强度集合,water_height为水位在全局地图中的高度,n为属于网格sij内的点云个数。
29、本发明的有益效果:
30、1.本发明解决了传统船舶目标检测检测速度慢、检测精度低、易受环境因素干扰等问题,采用激光雷达获取船闸禁停区船舶点云数据,并进行点云预处理,再将三维点云转为二维鸟瞰图,输入目标检测网络,具有检测速度快、检测精度高、易于操作等优点。
31、2.本发明首次在船闸场景下将3d激光雷达转换为2d鸟瞰图的方式来做目标检测,自动发现目标,提高通航效率。
32、3.本发明在船闸禁停区实施船舶目标检测,保障闸门的安全,提高了通航的安全。
技术特征:
1.一种基于激光点云正投影的船闸禁停区船舶目标检测方法,其特征在于:它包括以下步骤:
2.根据权利要求书1所述的一种基于激光点云正投影的船闸禁停区船舶目标检测方法,其特征在于:所述步骤s1的具体方法包括以下子步骤:
3.根据权利要求书1所述的一种基于激光点云正投影的船闸禁停区船舶目标检测方法,其特征在于:所述步骤s2的具体方法包括以下子步骤:
4.根据权利要求书1所述的一种基于激光点云正投影的船闸禁停区船舶目标检测方法,其特征在于:所述步骤s3的具体方法为:
技术总结
本发明公开一种基于激光点云正投影的船闸禁停区船舶目标检测方法,它包括以下步骤:步骤S1:通过船闸背景分割算法得到船闸禁停区域点云;步骤S2:通过船闸点云降采样算法减少点云数量并获得更加均匀的船舶点云;步骤S3:通过人工设计的特征将点云数据转为鸟瞰图;步骤S4:将鸟瞰图作为YOLO的输入,输出船舶数量以及船舶包围框;本发明解决了传统船舶目标检测检测速度慢、检测精度低、易受环境因素干扰等问题,采用激光雷达获取船闸禁停区船舶点云数据,并进行点云预处理,再将三维点云转为二维鸟瞰图,输入目标检测网络,具有检测速度快、检测精度高、易于操作等优点。
技术研发人员:陈坤,任明武,胡航,郑文浩,高术,任德鑫,秦一帆,侯博,杨全林,谢城,黎攀,董雷
受保护的技术使用者:长江三峡通航管理局
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!