一种测试数据模式划分方法、装置、设备及存储介质与流程
本申请涉及数据处理,提供一种测试数据模式划分方法、装置、设备及存储介质。
背景技术:
1、众所周知,飞机在投入使用之前,会经历设计、制造、安装、调试、试验和试飞等多个过程域阶段,其中,任务传感器是各个过程域阶段重要的数据采集设备,而利用各个过程域的测试数据来评估任务传感器的精度是否达标,是保证飞机安全的重要指标。然而,在各个过程域中,由于飞机是通过不同的测试条件来进行测试,因此,数据模式的分布会存在较大差异,进而,致使测试数据出现多模式的特征。然而,数据模式的差异难以用一个“全局模型”来对各个过程域进行分析,进而,致使任务传感器的精度评估结果会受到较大影响。
2、因此,如何在多过程域的测试数据复杂模式情况下,通过模式划分来准确评估任务传感器的精度成了目前亟待解决的问题。
技术实现思路
1、本申请提供一种测试数据模式划分方法、装置、设备及存储介质,用于解决多过程域的测试数据复杂模式导致任务传感器精度评估不准确的问题。
2、一方面,提供一种测试数据模式划分方法,所述方法包括:
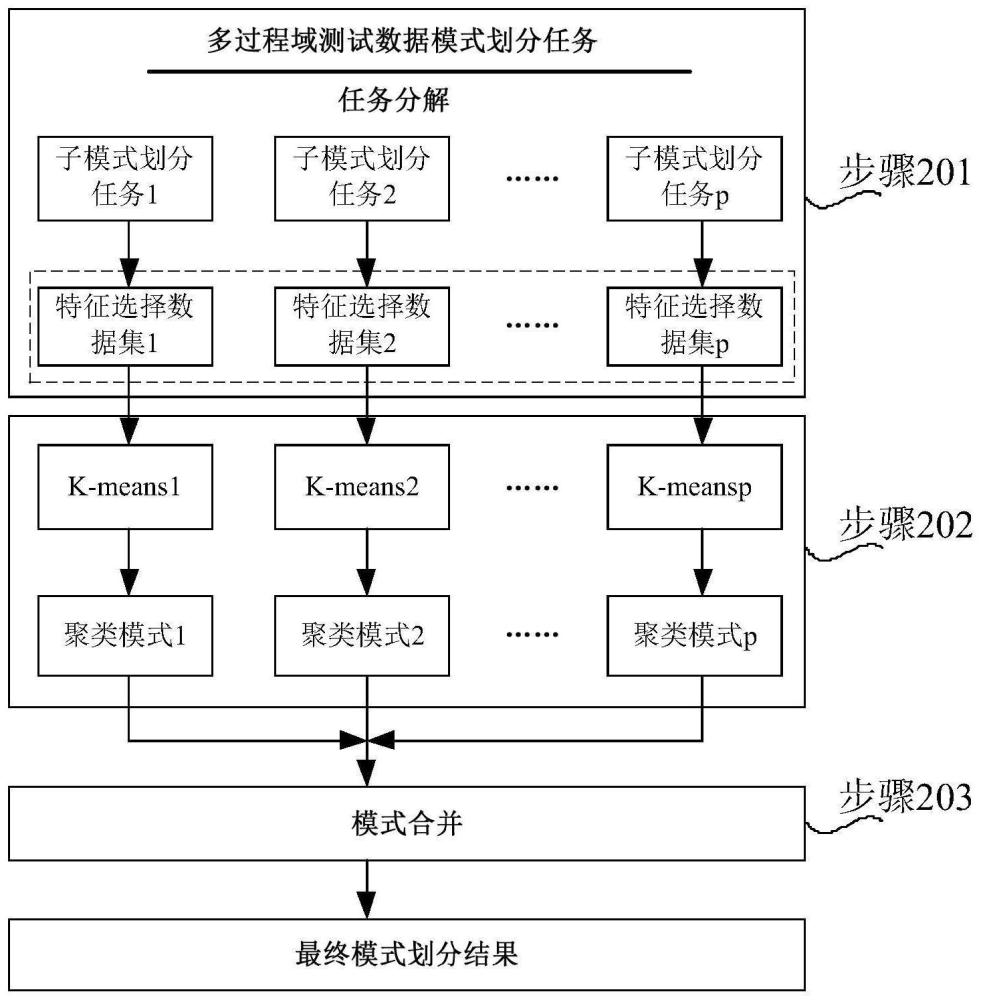
3、针对飞机的任一过程域,根据模式任务特征,将所述过程域的总模式划分任务分解为多个不同尺度的子模式划分任务;其中,所述模式任务特征为所述飞机的飞行特性;
4、根据各个子模式划分任务对应的特征参数,对所述过程域的测试数据进行k-means无监督聚类,并行确定出所述各个子模式划分任务对应的模式划分结果;其中,所述特征参数为影响所述各个子模式划分任务对应的模式动态变化的关键特征;
5、对所述各个子模式划分任务对应的模式划分结果进行合并,获得所述过程域对应的最终模式划分结果。
6、可选的,所述针对飞机的任一过程域,根据模式任务特征,将所述过程域的总模式划分任务分解为多个不同尺度的子模式划分任务的步骤,包括:
7、针对所述飞机的试飞过程域,根据第一模式机理特征和第一预设专家经验参数,确定所述试飞过程域的纵向变化特征与横向变化特征;
8、根据所述纵向变化特征与所述横向变化特征,将所述试飞过程域的总模式划分任务分解为多个不同尺度的子模式划分任务。
9、可选的,在根据各个子模式划分任务对应的特征参数,对所述过程域的测试数据进行k-means无监督聚类,并行确定出所述各个子模式划分任务对应的模式划分结果之前,所述方法还包括:
10、对所述过程域的测试数据进行对齐,获得对齐后的测试数据;
11、以所述齐后的测试数据中的最大采样频率为基准,对所述对齐后的测试数据进行均值插值,获得插值后的测试数据;
12、根据所述插值后的测试数据的均值和方差,对所述插值后的测试数据进行标准化处理,获得标准化处理后的测试数据。
13、可选的,所述根据各个子模式划分任务对应的特征参数,对所述过程域的测试数据进行k-means无监督聚类,并行确定出所述各个子模式划分任务对应的模式划分结果的步骤,包括:
14、根据所述各个子模式划分任务对应的特征参数,对所述标准化处理后的测试数据进行k-means无监督聚类,并行确定出所述各个子模式划分任务对应的模式划分结果。
15、可选的,所述根据各个子模式划分任务对应的特征参数,对所述过程域的测试数据进行k-means无监督聚类,并行确定出所述各个子模式划分任务对应的模式划分结果的步骤,包括:
16、根据第二模式机理特征和第二预设专家经验参数,确定所述各个子模式划分任务对应的特征参数;
17、根据所述特征参数,对所述过程域的测试数据进行k-means无监督聚类,并行确定出所述各个子模式划分任务对应的模式标签。
18、可选的,所述对所述各个子模式划分任务对应的模式划分结果进行合并,获得所述过程域对应的最终模式划分结果的步骤,包括:
19、将所述各个子模式划分任务对应的模式标签通过叠加操作进行合并,获得所述过程域对应的最终模式划分结果。
20、可选的,所述将所述各个子模式划分任务对应的模式标签通过叠加操作进行合并,获得所述过程域对应的最终模式划分结果的步骤,包括:
21、按照所述尺度从小到大,将所述各个子模式划分任务对应的模式标签通过叠加操作进行逐级逆向合并,获得所述过程域对应的最终模式划分结果。
22、一方面,提供一种测试数据模式划分装置,所述装置包括:
23、任务分解单元,用于针对飞机的任一过程域,根据模式任务特征,将所述过程域的总模式划分任务分解为多个不同尺度的子模式划分任务;其中,所述模式任务特征为所述飞机的飞行特性;
24、模式聚类单元,用于根据各个子模式划分任务对应的特征参数,对所述过程域的测试数据进行k-means无监督聚类,并行确定出所述各个子模式划分任务对应的模式划分结果;其中,所述特征参数为影响所述各个子模式划分任务对应的模式动态变化的关键特征;
25、模式合并单元,用于对所述各个子模式划分任务对应的模式划分结果进行合并,获得所述过程域对应的最终模式划分结果。
26、一方面,提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任一种方法。
27、一方面,提供一种计算机存储介质,其上存储有计算机程序指令,该计算机程序指令被处理器执行时实现上述任一种方法。
28、在本申请实施例中,当需要评估任务传感器的精度时,首先,针对飞机的任一过程域,根据模式任务特征,可以将过程域的总模式划分任务分解为多个不同尺度的子模式划分任务;然后,根据各个子模式划分任务对应的特征参数,可以对过程域的测试数据进行k-means无监督聚类,来并行确定出各个子模式划分任务对应的模式划分结果;最后,对各个子模式划分任务对应的模式划分结果进行合并,便可以获得过程域对应的最终模式划分结果。因此,在本申请实施例中,由于会将过程域的总模式划分任务分解为多个不同尺度的子模式划分任务,因此,可以使复杂的模式划分任务简单化。此外,还由于是通过“k-means无监督聚类”,来“并行”确定各个子模式划分任务对应的模式划分结果,并通过“合并”不同尺度的子模式划分任务各自对应的模式划分结果,来获得过程域对应的最终模式划分结果,因此,不仅可以通过表征飞机的各个过程域测试数据模式的分布情况,来实现各个过程域的测试数据模式的精细划分,以对任务传感器的精度进行准确评估,还可以避免在递归过程中的累计误差,以进一步提高模式划分精准度,从而,保障飞机的安全飞行。
技术特征:
1.一种测试数据模式划分方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述针对飞机的任一过程域,根据模式任务特征,将所述过程域的总模式划分任务分解为多个不同尺度的子模式划分任务的步骤,包括:
3.如权利要求1所述的方法,其特征在于,在根据各个子模式划分任务对应的特征参数,对所述过程域的测试数据进行k-means无监督聚类,并行确定出所述各个子模式划分任务对应的模式划分结果之前,所述方法还包括:
4.如权利要求3所述的方法,其特征在于,所述根据各个子模式划分任务对应的特征参数,对所述过程域的测试数据进行k-means无监督聚类,并行确定出所述各个子模式划分任务对应的模式划分结果的步骤,包括:
5.如权利要求1所述的方法,其特征在于,所述根据各个子模式划分任务对应的特征参数,对所述过程域的测试数据进行k-means无监督聚类,并行确定出所述各个子模式划分任务对应的模式划分结果的步骤,包括:
6.如权利要求5所述的方法,其特征在于,所述对所述各个子模式划分任务对应的模式划分结果进行合并,获得所述过程域对应的最终模式划分结果的步骤,包括:
7.如权利要求6所述的方法,其特征在于,所述将所述各个子模式划分任务对应的模式标签通过叠加操作进行合并,获得所述过程域对应的最终模式划分结果的步骤,包括:
8.一种测试数据模式划分装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,所述设备包括:
10.一种存储介质,其特征在于,所述存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行权利要求1-7中任一所述的方法。
技术总结
本申请提供一种测试数据模式划分方法、装置、设备及存储介质,涉及数据处理技术领域,用于解决多过程域的测试数据复杂模式导致任务传感器精度评估不准确的问题。该方法包括:针对飞机的任一过程域,根据模式任务特征,将所述过程域的总模式划分任务分解为多个不同尺度的子模式划分任务;根据各个子模式划分任务对应的特征参数,对所述过程域的测试数据进行K‑means无监督聚类,并行确定出所述各个子模式划分任务对应的模式划分结果;对所述各个子模式划分任务对应的模式划分结果进行合并,获得所述过程域对应的最终模式划分结果。
技术研发人员:耿畅,莫文静,王本宽,王媛,裴昌凡
受保护的技术使用者:成都飞机工业(集团)有限责任公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!