一种下肢外骨骼的扰动估计方法
本发明涉及机器人,尤其涉及一种下肢外骨骼的扰动估计方法。
背景技术:
1、自平衡下肢外骨骼机器人是一类高自由度、全驱动、无需拐杖或推车等额外辅助支撑工具便可动态平衡行走的机器人,它可以帮助截瘫、截瘫、四肢瘫患者进行下肢医疗康复训练,并实现自主动态平衡行走。对于许多可穿戴外骨骼,完全刚性模型不足以描述实际运动。由于材料刚度不足,在穿戴者行走的时候,连杆具有弹性形变,此外穿戴者和外骨骼两者的大重量进一步放大外骨骼实际模型和理想刚体模型间的误差。用户行走过程中外骨骼形变造成的干扰,在人-外骨骼混合系统中是不可避免的,并直接影响反馈控制的有效性。
2、实现人-外骨骼混合系统的动态自平衡行走的挑战,包括准确估计行走过程中外骨骼的形变,以及提高外骨骼对不同体重用户干扰的鲁棒性。外骨骼机器人需要为穿戴者提供足够的活动空间,并承受相对较重的人体重量。因此,需要实现一种对不确定人为干扰准确的估计方法,解决人-外骨骼系统的形变问题,使得不同体重的穿戴者稳定行走。
3、现有技术中使用多个惯性传感器(imu)和运动捕捉来重建外骨骼行走过程中多种形变状态的估计技术,缺点是惯性传感器和运动捕捉相关方法存在固有的偏差,需要进行校准。此外,稳定行走控制策略需要具有鲁棒适应的能力,还要考虑穿戴者人为干扰导致的外骨骼形变的影响。
技术实现思路
1、有鉴于此,本发明提供一种下肢外骨骼的扰动估计方法,以解决上述问题。
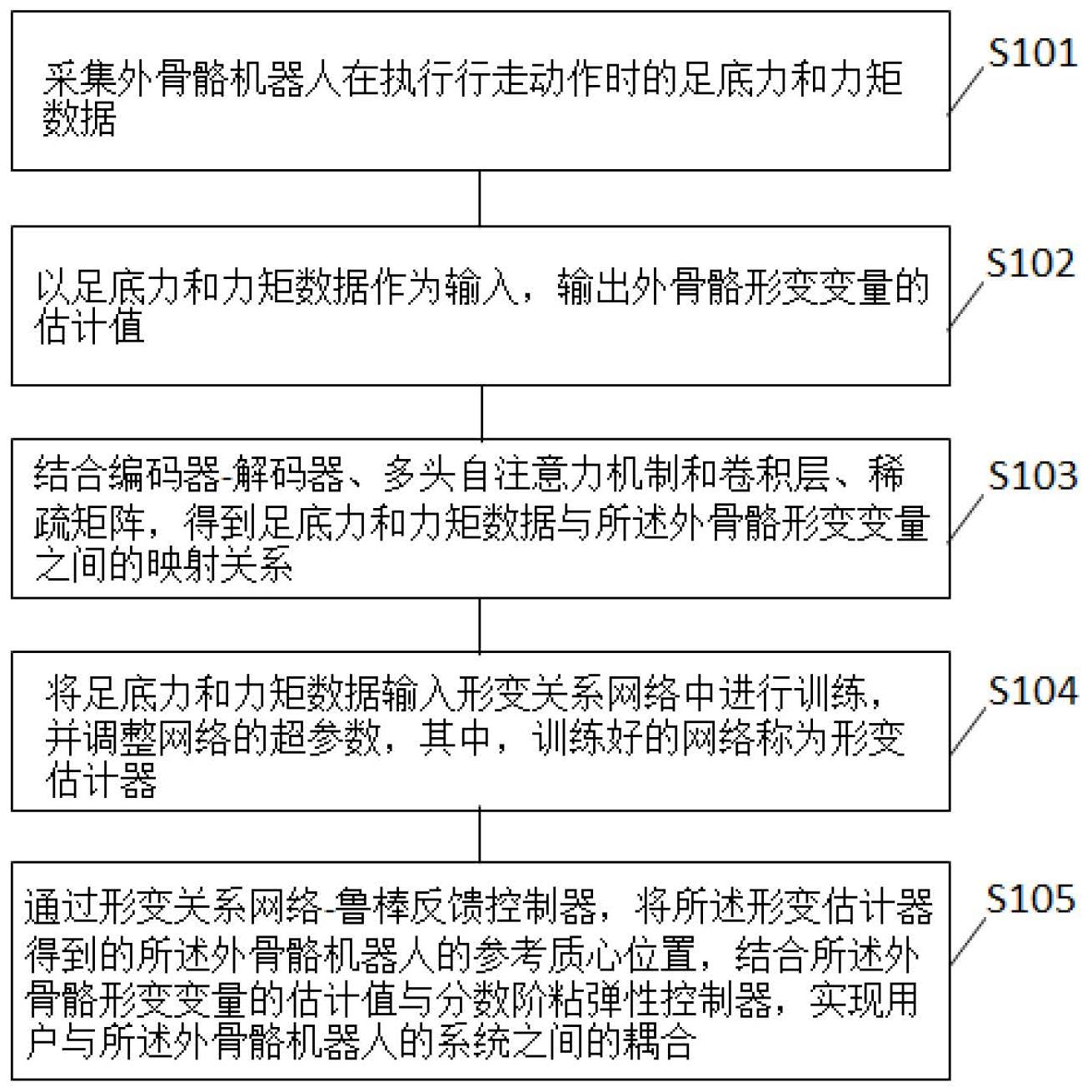
2、本发明提供一种下肢外骨骼的扰动估计方法,包括:采集外骨骼机器人在执行行走动作时的足底力和力矩数据;以所述足底力和力矩数据作为输入,输出外骨骼形变变量的估计值;结合编码器-解码器、多头自注意力机制和卷积层、稀疏矩阵,得到足底力和力矩数据与所述外骨骼形变变量之间的映射关系;将所述足底力和力矩数据输入形变关系网络中进行训练,并调整网络的超参数,其中,训练好的网络称为形变估计器;通过形变关系网络-鲁棒反馈控制器,将所述形变估计器得到的所述外骨骼机器人的参考质心位置,结合所述外骨骼形变变量的估计值与分数阶粘弹性控制器,实现用户与所述外骨骼机器人的系统之间的耦合;通过逆运动学求解器基于用户与所述外骨骼机器人的系统之间的耦合关系解算出下一时刻各关节的目标关节角度。
3、在本发明的另一实现方式中,一种下肢外骨骼的扰动估计方法还包括:在所述外骨骼机器人的双足的足底安装六维力传感器;采集外骨骼机器人在执行行走动作时的足底力和力矩数据,包括:通过所述六维力传感器采集外骨骼机器人在执行行走动作时的足底力和力矩数据。
4、在本发明的另一实现方式中,所述外骨骼形变变量的估计值表示为:
5、
6、其中,是质心处的实际姿态,即动捕系统下测得的外骨骼实际姿态,是质心处的参考姿态,即预规划的外骨骼姿态。
7、在本发明的下肢外骨骼的扰动估计方法中,以原始的力和力矩数据估计外骨骼形变量,通过结合了编码器-解码器、多头自注意力机制和卷积神经网络建立的形变关系网络的强大学习能力,估计出外骨骼形变量,外骨骼全身形变由质心处形变表示;借助分数阶粘弹性控制器,利用六维力传感器的数据和前4个周期的δtcom产生一个新的δtcom,满足零力矩点的实际位置始终在双脚的支撑面内,使人-外骨骼混合系统在每个控制周期内保持稳定,为外骨骼提供稳定行走的自适应控制;形变关系网络和分数阶粘弹性方法紧密耦合,在每个控制周期内对形变进行了准确的估计和补偿,从而提高了下肢外骨骼的自平衡行走能力。
技术特征:
1.一种下肢外骨骼的扰动估计方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,还包括:
3.根据权利要求1所述的方法,其特征在于,所述外骨骼形变变量的估计值表示为:
技术总结
本发明提供一种下肢外骨骼的扰动估计方法,包括:以足底力和力矩数据作为输入,输出外骨骼形变变量的估计值;结合编码器‑解码器、多头自注意力机制和卷积层、稀疏矩阵,得到足底力和力矩数据与外骨骼形变变量之间的映射关系;将足底力和力矩数据输入形变关系网络中进行训练,并调整网络的超参数;通过形变关系网络‑鲁棒反馈控制器,将形变估计器得到的外骨骼机器人的参考质心位置,结合外骨骼形变变量的估计值与分数阶粘弹性控制器,实现用户与外骨骼机器人的系统之间的耦合;通过逆运动学求解器基于用户与外骨骼机器人的系统之间的耦合关系解算出下一时刻各关节的目标关节角度。本发明的方法提高了下肢外骨骼的自平衡行走能力。
技术研发人员:吴新宇,田定奎,祝元培,李锋,陈自强,李文韬,李金科,尹猛,张石生
受保护的技术使用者:中国科学院深圳先进技术研究院
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!