一种机器学习驱动的双流体喷嘴空化状态识别方法
本发明涉及一种基于机器学习的空化状态识别方法,特别涉及一种机器学习驱动的双流体喷嘴空化状态识别方法。
背景技术:
1、双流体喷嘴在行业中的应用非常广泛,例如,在喷雾涂装业中,人们可以利用这种技术,将涂料精细地喷涂到目标物体表面上,从而达到非常平滑的表面效果。双流体喷嘴是一个非常重要而又实用的技术。通过双流体喷嘴,人类能够实现更细腻、精确和高效率的液体喷射操作,对于人们的生产和日常生活都有着非常深远的意义。
2、但是在双流体喷嘴在喷射过程中会产生空化,空化产生蒸汽泡,并在较高压力区迅速破裂,这样的过程将会使得金属表面承受反复不断的冲击力作用,进而产生喷嘴的气蚀磨损。同时,空化对喷雾效果也会产生重要的影响,因此准确掌握喷嘴内空化现象对双流体喷嘴高效、安全、稳定运行意义重大。
技术实现思路
1、双流体喷嘴空化状态的准确识别,对双流体喷嘴的运行和后续研究具有重要意义,本发明基于机器学习对双流体喷嘴空化状态进行识别,可以提高空化状态的识别准确率。
2、本发明是通过以下技术方案实现的:
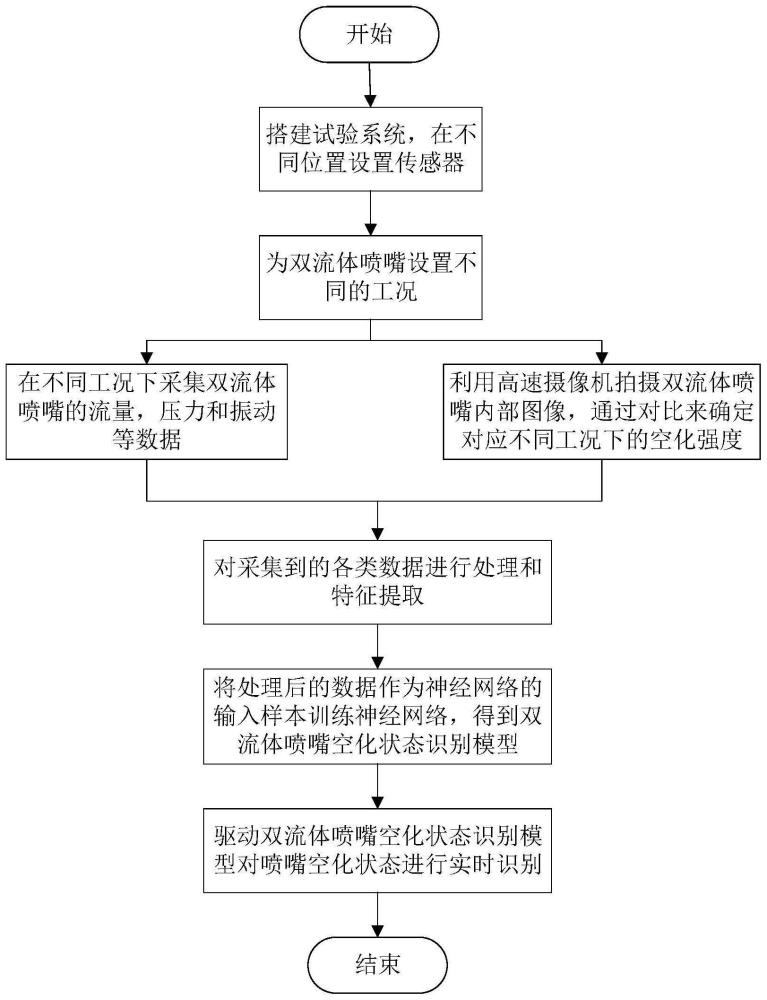
3、本发明提出一种机器学习驱动的双流体喷嘴空化状态识别方法,包括以下步骤:
4、步骤一:在透明的双流体喷嘴上设置用于采集双流体喷嘴空化数据的传感器,在透明的双流体喷嘴外部设置用于拍摄双流体喷嘴内部区域图像的成像设备;
5、步骤二:将双流体喷嘴设置为多种不同工况,然后在不同工况下通过传感器采集双流体喷嘴的空化数据并通过成像设备同步拍摄透明的双流体喷嘴的内部区域图像;将传感器采集双流体喷嘴的空化数据与双流体喷嘴空化数据进行比对,确定双流体喷嘴空化数据下双流体喷嘴的空化状态;将双流体喷嘴的空化数据与对应的空化状态设置为训练集;
6、步骤三:基于神经网络构建初始化的双流体喷嘴空化状态识别模型,将步骤二得到训练集对双流体喷嘴空化状态识别模型进行训练,得到训练好的双流体喷嘴空化状态识别模型;
7、步骤四:将训练好的双流体空化状态识别模型应用到双流体喷嘴检测中,实现在线识别双流体喷嘴的实时空化状态。
8、作为本发明的优选方案,所述步骤一中的传感器包括压力传感器、流量传感器和振动传感器;在双流体喷嘴的进气管道上设置压力传感器,在双流体喷嘴的进水管道上设置流量传感器和压力传感器,在双流体喷嘴上设置振动传感器,在双流体喷嘴的流量和压力调节范围内,在不同的流量和压力条件下将双流体喷嘴设置为多种不同工况并采集不同工况下双流体喷嘴的空化数据。
9、作为本发明的优选方案,所述步骤三具体为:
10、3.1)构建基于神经网络的初始化的双流体喷嘴空化状态识别模型:对网络参数进行设定,其中设定网络参数包括最大训练次数、学习精度、学习速率、初始权值和迭代停止条件;
11、3.2)首先将训练集中的数据进行归一化处理后输入到神经网络中,进行前向传播训练;每次训练时的训练误差再利用反向传播公式对权值进行调整更新,直至调整的权值能使输出的误差满足设定的精度要求,或达到最大训练次数则完成神经网络训练。
12、3.3)用预先准备好的测试样本向量矩阵对已经训练好的神经网络进行测试,若测试样本输出结果误差满足预先设定的精度要求,则训练测试结束;若测试样本输出结果误差不满足预先设定的精度要求,则调整参数,重复步骤3.2)和33)的操作。
13、作为本发明的优选方案,双流体喷嘴空化状态包括亚空化、临界空化、局部空化以及超空化。所述的四种空化状态:亚空化状态是在液体内部或液固交界面上没有空泡的状态;临界空化状态是在液固交界面上开始出现空泡的状态;局部空化状态是在固体局部边界面上和邻近液体内部出现空泡的状态;超空化状态是在固体整个边界面上和靠近固体尾端的液体中都出现空泡的状态。
14、本发明与现有技术对比,其优点在于:
15、1.本发明提出机器学习驱动的双流体喷嘴空化状态识别方法,采用了深度学习技术,通过神经网络训练,得到双流体喷嘴空化状态识别模型。基于模型,实现在线数据驱动的双流体喷嘴空化状态识别,克服了现有手段无法及时知道双流体喷嘴空化状态的问题。同时,也很大程度的减少人工参与且可以提高识别准确率,并对双流体喷嘴的运行和后续研究具有重要作用。
16、2.本发明通过搭建实验台,设置了不同的传感器来获得双流体喷嘴的数据,对流量、压力和振动数据综合处理后,克服了现有技术中分析空化状态时数据单一,准确率不高的问题,使双流体喷嘴空化状态识别准确率上升。
技术特征:
1.一种机器学习驱动的双流体喷嘴空化状态识别方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的机器学习驱动的双流体喷嘴空化状态识别方法,其特征在于,所述步骤一中的传感器包括压力传感器、流量传感器和振动传感器;在双流体喷嘴的进气管道上设置压力传感器,在双流体喷嘴的进水管道上设置流量传感器和压力传感器,在双流体喷嘴上设置振动传感器,在双流体喷嘴的流量和压力调节范围内,在不同的流量和压力条件下将双流体喷嘴设置为多种不同工况并采集不同工况下双流体喷嘴的空化数据。
3.根据权利要求1所述的机器学习驱动的双流体喷嘴空化状态识别方法,其特征在于,双流体喷嘴空化状态包括亚空化、临界空化、局部空化以及超空化。
4.根据权利要求1所述的机器学习驱动的双流体喷嘴空化状态识别方法,其特征在于,所述步骤三具体为:
5.根据权利要求4所述的机器学习驱动的双流体喷嘴空化状态识别方法,其特征在于,所述神经网络由输入层、输出层以及隐含层组成;输入层输入双流体喷嘴的空化数据,隐含层将输入层输入的数据进行特征提取,给特征数据做变换去拟合数据对应的标签,然后输出层用于输出空化状态评价,得到双流体喷嘴的空化状态结果。
6.根据权利要求5所述的机器学习驱动的双流体喷嘴空化状态识别方法,其特征在于,所述神经网络根据输入层输入的双流体喷嘴的空化数据构建输入向量矩阵确定输入节点数;
7.根据权利要求5所述的机器学习驱动的双流体喷嘴空化状态识别方法,其特征在于,步骤3.2)中神经网络的向前传播为:设wij为输入层和隐含层连接的权值,wji为隐含层和输出层连接的权值,预先设定双流体喷嘴运作时特征值构建的特征向量x为输入向量,输出向量y,选择权值的初始值wij(0)和wji(0)计算总目标函数j(t),经过t次权值调整后,先计算p组的输入的目标函数ep:
8.根据权利要求7所述的机器学习驱动的双流体喷嘴空化状态识别方法,其特征在于,步骤3.2)中利用反向传播公式对权值进行调整更新具体为:依据j(t)的计算结果,采用梯度下降的方法进行权值的调整,设步长为μ,得到t+1次权值调整:
技术总结
本发明公开一种机器学习驱动的双流体喷嘴空化状态识别方法,本发明设计了双流体喷嘴空化实验系统,对双流体喷嘴进行了多组工况下的空化试验,通过设置在不同位置的传感器采集各工况数据,采集的主要数据为流量、压力和振动信号。将获得的数据作为神经网络的输入样本,并将神经网络在Jupyter Notebook上进行训练,得到双流体喷嘴空化状态识别模型,通过模型可以实现对双流体喷嘴的空化状态识别。基于模型,实现在线数据驱动的双流体喷嘴空化状态识别,克服了现有手段无法及时知道双流体喷嘴空化状态的问题。同时,也很大程度的减少人工参与且可以提高识别准确率,并对双流体喷嘴的运行和后续研究具有重要作用。
技术研发人员:陈波,张哲源,李文英,卢英杰,钟义龙,李研彪
受保护的技术使用者:浙江工业大学
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!