飞行器地面停留时间预估方法、装置、设备及介质与流程
本发明涉及飞行器,特别涉及一种飞行器地面停留时间预估方法、装置、设备及介质。
背景技术:
1、任务规划是飞行器实现侦察任务的有效支撑和重要保证,在规划过程中,飞行器地面停留时间对任务规划具有重要意义,基于精确的飞行器地面停留时间能够准确预测出飞行器的下次起飞时间。
2、而现有的技术中,对于飞行器的地面停留时间主要是根据经验而进行估计,该方法确定的飞行器地面停留时间不够准确。因此,亟需一种准确的飞行器地面停留时间预估方法。
技术实现思路
1、鉴于上述问题,本发明实施例提供了一种飞行器地面停留时间预估方法、装置、设备及介质,以便克服上述问题或者至少部分地解决上述问题。
2、本发明实施例的第一方面,公开了一种飞行器地面停留时间预估方法,所述方法包括:
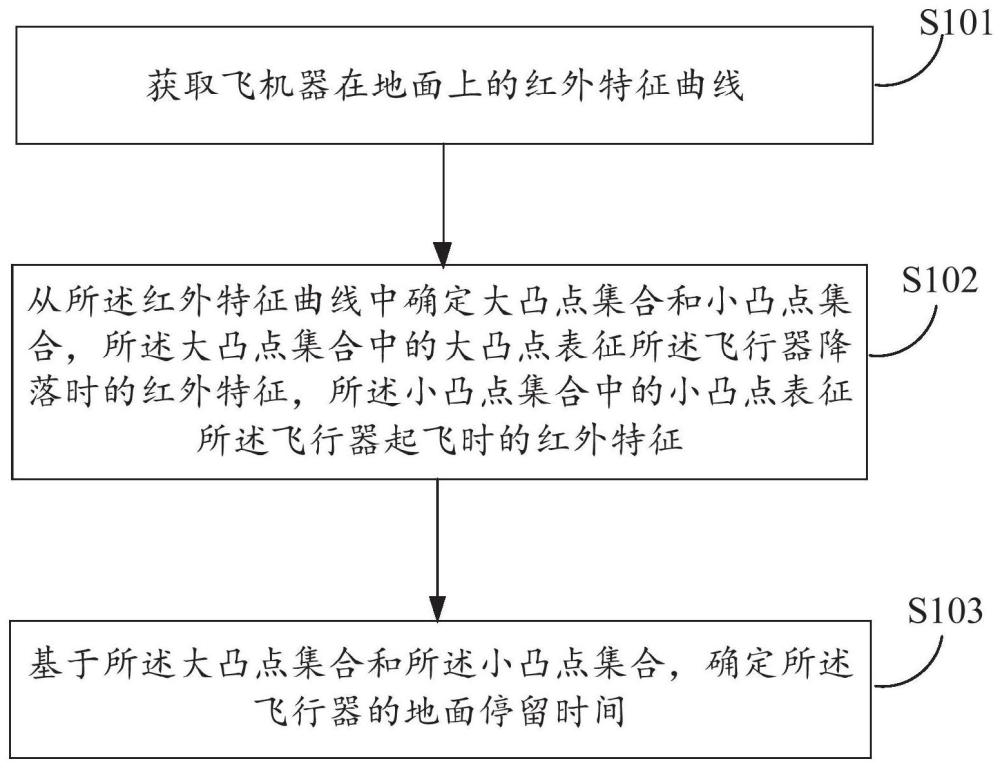
3、获取飞行器产生的地面红外特征曲线;
4、从所述飞行器产生的地面红外特征曲线中确定大凸点集合和小凸点集合,所述大凸点集合中的大凸点表征所述飞行器降落时的红外特征,所述小凸点集合中的小凸点表征所述飞行器起飞时的红外特征;
5、基于所述大凸点集合和所述小凸点集合,确定所述飞行器的地面停留时间。
6、可选地,所述从所述飞行器产生的地面红外特征曲线中确定大凸点集合和小凸点集合,包括:
7、对所述飞行器产生的地面红外特征曲线进行采样,得到由m个采样点组成的所述飞行器产生的地面红外特征曲线的采样集合;
8、根据所述采样集合设定第一变化阈值和第二变化阈值;
9、遍历所述采样集合,确定所述采样集合中每个采样点的第一红外特征变化值,将所述第一红外特征变化值大于所述第一变化阈值的采样点确定为大凸点;
10、遍历所述采样集合,确定所述采样集合中每个采样点的第二红外特征变化值,将所述第二红外特征变化值大于所述第二变化阈值的采样点确定为小凸点。
11、可选地,所述根据所述采样集合设定第一变化阈值和第二变化阈值,包括:
12、根据所述采样集合中的采样点,计算所述采样点的红外特征均值,将所述红外特征均值作为第一变化阈值;
13、确定检测系数k,将所述红外特征均值除以所述检测系数k,得到第二变化阈值,所述检测系数k为正整数。
14、可选地,所述遍历所述采样集合,确定所述采样集合中每个采样点的第一红外特征变化值,包括:
15、依次将当前采样点的红外特征值减去上一采样点的红外特征值,得到每个采样点的第一红外特征变化值。
16、可选地,第二红外特征变化值包括:前采样点特征变化值和后采样点特征变化值;遍历所述采样集合,确定所述采样集合中每个采样点的第二红外特征变化值,包括:
17、计算当前采样点的前k个采样点的红外特征均值,将所述当前采样点的红外特征值减去所述前k个采样点的红外特征均值,得到前采样点特征变化值;
18、计算所述当前采样点的后k个采样点的红外特征均值,将所述当前采样点的红外特征值减去所述后k个采样点的红外特征均值,得到后采样点特征变化值。
19、可选地,将所述第二红外特征变化值大于所述第二变化阈值的采样点确定为小凸点,包括:
20、在所述当前采样点的红外特征值大于所述前采样点特征变化值,且大于所述后采样点特征变化值的情况下,将当前采样点确定为小凸点。
21、可选地,所述大凸点集合中的大凸点按照时间顺序排列,所述小凸点集合中的小凸点按照时间顺序排列,所述大凸点集合中的每个大凸点与小凸点集合中的一个小凸点对应;所述基于所述大凸点集合和所述小凸点集合,确定所述飞行器的地面停留时间,包括:
22、根据所述大凸点集合中的每个大凸点与所述小凸点集合中对应的小凸点确定一个初始地面停留时间;
23、根据多个所述初始地面停留时间计算出地面停留时间的平均值,以作为所述飞行器的地面停留时间。
24、本发明实施例的第二方面,公开了一种飞行器地面停留时间预估装置,所述装置包括:
25、曲线获取模块,用于获取飞行器产生的地面红外特征曲线;
26、集合确定模块,用于从所述飞行器产生的地面红外特征曲线中确定大凸点集合和小凸点集合,所述大凸点集合中的大凸点表征所述飞行器降落时的红外特征,所述小凸点集合中的小凸点表征所述飞行器起飞时的红外特征;
27、时间确定模块,用于基于所述大凸点集合和所述小凸点集合,确定所述飞行器的地面停留时间。
28、本发明实施例的第三方面,公开了一种电子设备,包括存储器、处理器及存储在所述存储器上的计算机程序,所述处理器执行所述计算机程序以实现本发明实施例第一方面所述的飞行器地面停留时间预估方法。
29、本发明实施例的第四方面,公开了一种计算机可读存储介质,其上存储有计算机程序/指令,该计算机程序/指令被处理器执行时实现本发明实施例第一方面所述的飞行器地面停留时间预估方法。
30、本发明实施例包括以下优点:
31、在本发明实施例中,基于飞行器产生的地面红外特征能够准确反映飞行器降落和起飞时间特点,进而利用飞行器产生的地面红外特征对飞行器地面停留时间进行预估。首先,获取飞行器产生的地面红外特征曲线;然后,从飞行器产生的地面红外特征曲线中确定大凸点集合和小凸点集合,其中大凸点集合中的大凸点表征飞行器降落时的红外特征,小凸点集合中的小凸点表征飞行器起飞时的红外特征;最后,基于大凸点集合和小凸点集合,确定飞行器的地面停留时间。
32、由于飞行器产生的地面红外特征能够准确反映出飞行器的降落时间和起飞时间,因此基于飞行器产生的地面红外特征确定的飞行器地面停留时间准确性高;并且,在大凸点集合和小凸点集合包含多个飞行器的降落时间和起飞时间,即飞行器的地面停留时间是利用多个降落时间和起飞时间而确定,进一步保证地面停留时间的准确性。
技术特征:
1.一种飞行器地面停留时间预估方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述从所述飞行器产生的地面红外特征曲线中确定大凸点集合和小凸点集合,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述采样集合设定第一变化阈值和第二变化阈值,包括:
4.根据权利要求2所述的方法,其特征在于,所述遍历所述采样集合,确定所述采样集合中每个采样点的第一红外特征变化值,包括:
5.根据权利要求3所述的方法,其特征在于,第二红外特征变化值包括:前采样点特征变化值和后采样点特征变化值;遍历所述采样集合,确定所述采样集合中每个采样点的第二红外特征变化值,包括:
6.根据权利要求5所述的方法,其特征在于,将所述第二红外特征变化值大于所述第二变化阈值的采样点确定为小凸点,包括:
7.根据权利要求1所述的方法,其特征在于,所述大凸点集合中的大凸点按照时间顺序排列,所述小凸点集合中的小凸点按照时间顺序排列,所述大凸点集合中的每个大凸点与小凸点集合中的一个小凸点对应;所述基于所述大凸点集合和所述小凸点集合,确定所述飞行器的地面停留时间,包括:
8.一种飞行器地面停留时间预估装置,其特征在于,所述装置包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上的计算机程序,其特征在于,所述处理器执行所述计算机程序实现如权利要求1至7中任一项所述的飞行器地面停留时间预估方法。
10.一种计算机可读存储介质,其上存储有计算机程序/指令,其特征在于,该计算机程序/指令被处理器执行时实现如权利要求1至7中任一项所述的飞行器地面停留时间预估方法。
技术总结
本发明实施例提供了一种飞行器地面停留时间预估方法、装置、设备和介质,所述方法包括:获取飞行器产生的地面红外特征曲线;从所述飞行器产生的地面红外特征曲线中确定大凸点集合和小凸点集合,所述大凸点集合中的大凸点表征所述飞行器降落时的红外特征,所述小凸点集合中的小凸点表征所述飞行器起飞时的红外特征;基于所述大凸点集合和所述小凸点集合,确定所述飞行器的地面停留时间。本发明实施例,由于红外特征能够准确反映出飞行器的降落时间和起飞时间,因此基于红外特征确定的飞行器地面停留时间准确性高;并且飞行器的地面停留时间是利用多个降落时间和起飞时间而确定,进一步保证地面停留时间的准确性。
技术研发人员:李永瑾,许京奕,王佳绪,刘向民
受保护的技术使用者:北京大数据先进技术研究院
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!