一种构件焊缝表面缺陷识别定位及打磨系统
本发明属于图像识别,具体涉及一种构件焊缝表面缺陷识别定位及打磨系统。
背景技术:
1、港机、船舶及工程机械等大型装备制造过程中涉及大量的大型构件加工制造,涉及焊接、打磨等关键工序,因为焊接及打磨工作量,采用人工作业,存在效率低、质量难以保证、劳动强度大、作业环境恶劣等问题。制造企业积极寻求机器人作业来逐步替代人工作业已经成为必然的发展趋势。
2、大型构件机器人焊接过程中,难免会出现焊接缺陷,尤其是焊缝表面缺陷,会直接影响加工工件的外观质量,因此,加工过程中需要对这些缺陷进行定位并打磨。相关技术中,机器人焊接完成后,对于焊缝表面缺陷的类型和位置不可预知,需要通过人工检视确定焊缝缺陷类型和位置,并引导机器人到达指定位置,并进行打磨。但因为工件大,人工检视焊缝除了效率低外,会出现漏检、误检等问题,另外还存在安全隐患问题。
技术实现思路
1、有鉴于此,本发明的目的在于克服现有技术的不足,提供一种构件焊缝表面缺陷识别定位及打磨系统,以解决现有技术中人工检视焊缝除了效率低外,会出现漏检、误检的问题。
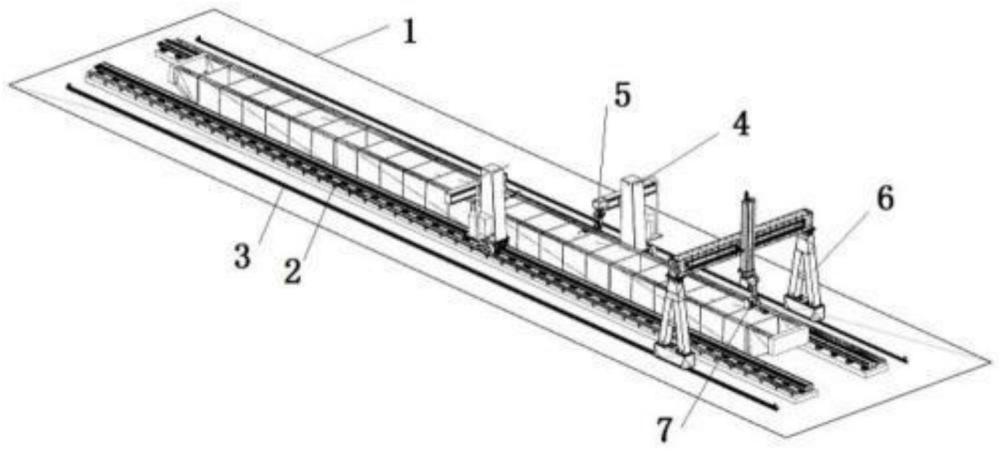
2、为实现以上目的,本发明采用如下技术方案:一种构件焊缝表面缺陷识别定位及打磨系统,包括:控制器、焊接台、第一轨道、第二轨道、搭载焊接机器人、悬臂梁、打磨机器人、龙门架以及视觉摄像机;
3、所述第一轨道和所述第二轨道设置在所述焊接台上;所述第一轨道位于所述第二轨道内侧;所述第一轨道上设有搭载焊接机器人的悬臂梁,所述第二轨道上设有搭载打磨机器人的龙门架;所述焊接机器人上搭载有视觉摄像机;
4、在焊接机器人焊接作业后,采用搭载在所述焊接机器人上的视觉传感器对待检测焊缝表面进行拍摄,获取待检测焊缝表面的图像;
5、利用控制器处理待检测焊缝表面的图像,获取焊缝表面缺陷位置信息和缺陷类型信息;并通过连线传输至打磨机器人;控制器控制打磨机器人完成焊缝表面缺陷打磨作业。
6、可选地,控制器图像处理方法,通过模板匹配或者深度学习方法识别焊缝表面缺陷的类型,同时基于图像标定和机器人手眼标定的数据信息定位缺陷所在空间位置。
7、可选地,所述控制器控制打磨机器人完成焊缝表面缺陷打磨作业,包括:
8、根据所述缺陷类型确定待打磨缺陷的打磨策略和打磨工具;
9、根据所述位置信息确定待打磨缺陷的位置和打磨时间;
10、根据打磨时间将打磨机器人移动到所述待打磨缺陷的位置,打磨机器人根据打磨策略利用打磨工具对所述待打磨缺陷进行打磨。
11、可选地,还包括:
12、若待检测焊缝表面包括多个,逐一拍摄并分析,直至所有待检测焊缝表面分析完成。
13、可选地,焊缝表面的缺陷类型,包括:焊瘤、飞溅、咬边、弧坑。
14、本发明采用以上技术方案,能够达到的有益效果包括:
15、本发明提供一种构件焊缝表面缺陷识别定位及打磨系统,所述系统包括在焊接机器人焊接作业后,对待检测焊缝表面进行拍摄,获取待检测焊缝表面的图像;分析所述待检测焊缝表面的图像,以获取所述待检测焊缝表面的缺陷类型和所述待检测焊缝表面缺陷的位置信息;根据所述缺陷类型和位置信息确定待打磨缺陷,采用打磨机器人对所述待打磨缺陷进行打磨处理。本发明通过焊接机器人搭载的视觉传感器直接确定焊缝表面缺陷的位置和类型,并传递给打磨机器人实施打磨作业,无须人工检测焊缝表面缺陷,打磨机器人可直达焊缝缺陷处实施打磨。提高了大型构件焊缝表面缺陷识别、定位和打磨的作业工效。
技术特征:
1.一种构件焊缝表面缺陷识别定位及打磨系统,其特征在于,包括:控制器、焊接台、第一轨道、第二轨道、搭载焊接机器人、悬臂梁、打磨机器人、龙门架以及视觉摄像机;
2.根据权利要求1所述的一种构件焊缝表面缺陷识别定位及打磨系统,其特征在于,控制器图像处理方法,通过模板匹配或者深度学习方法识别焊缝表面缺陷的类型,同时基于图像标定和机器人手眼标定的数据信息定位缺陷所在空间位置。
3.根据权利要求1所述的一种构件焊缝表面缺陷识别定位及打磨系统,其特征在于,所述控制器控制打磨机器人完成焊缝表面缺陷打磨作业,包括:
4.根据权利要求1所述的一种构件焊缝表面缺陷识别定位及打磨系统,其特征在于,还包括:
5.根据权利要求1所述的一种构件焊缝表面缺陷识别定位及打磨系统,其特征在于,焊缝表面的缺陷类型,包括:焊瘤、飞溅、咬边、弧坑。
技术总结
本发明涉及一一种构件焊缝表面缺陷识别定位及打磨系统,第一轨道和第二轨道设置在所述焊接台上;第一轨道位于第二轨道内侧;第一轨道上设有搭载焊接机器人的悬臂梁,第二轨道上设有搭载打磨机器人的龙门架;所述焊接机器人上搭载有视觉摄像机;在焊接机器人焊接作业后,采用搭载在焊接机器人上的视觉传感器对待检测焊缝表面进行拍摄,获取待检测焊缝表面的图像;利用控制器处理待检测焊缝表面的图像,获取焊缝表面缺陷位置信息和缺陷类型信息;并通过连线传输至打磨机器人;控制器控制打磨机器人完成焊缝表面缺陷打磨作业。本发明提高了大型构件焊缝表面缺陷识别、定位和打磨的作业工效。
技术研发人员:黄继强,张世成,薛龙,黄军芬,曹莹瑜,邹勇,张瑞英
受保护的技术使用者:北京石油化工学院
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!