一种RV减速器的配齿模型构建方法与流程
本发明属于减速器,具体涉及一种rv减速器的配齿模型构建方法。
背景技术:
1、rv(rotate vecvtor)减速器以其传动比大、扭转刚度大、传动精度高、高功率密度、抗冲击性强、寿命长、侧隙可调等优点,因此其广泛应用于精密仪器、航空航天、国防、工业机器人和医疗器械等领域。rv传动是一种新型的、二级封闭式、少齿差动行星传动机构,是从传统的摆线针轮行星传动上发展而来的。
2、国内外学者对于减速的相关基础研究由来已久,早在1926年,德国l.braren教授有机结合少齿差行星传动和摆线针轮传动,发明了摆线针轮行星减速器。日高照晃等人研究了两级、三曲柄、双摆线轮rv减速机的传动精度,讨论了各级、各元件的各种加工误差、装配误差的单独影响与相互影响,建立数学模型(二十自由度矩阵方程组),得出了一些重要的结论。
3、在rv传动配齿方面,国内外学者已经做了很多研究。中南大学赵海明等等提出了一种改变正齿轮内花键和外齿相位角的配齿方法。高文明和贡林欢等提出了新的rv减速器配齿条件-互换性条件。z,h和chen等分析了rv减速器的配齿模型构建方法。但上述研究均基于特定齿数齿轮传动进行配齿,无法对任意齿数齿轮传动配齿。
技术实现思路
1、本发明的目的在于克服现有技术的不足之处,提供一种满足不同型号不同传动比rv减速器的rv减速器的配齿模型构建方法。
2、本发明的上述目的之一通过以下技术方案来实现:
3、一种rv减速器的配齿模型构建方法,所涉及的rv减速器主要包括太阳轮、行星轮、曲柄轴、摆线轮、针齿壳;所述太阳轮为动力输入件,所述行星轮与太阳轮啮合,每个行星轮的中心孔通过花键与一曲柄轴的一端连接,曲柄轴的偏心部与摆线轮配合,摆线轮通过针齿销与针齿壳啮合,曲柄轴另一端与连接输出盘,实现动力输出;
4、当设计的行星轮为两个时,配齿过程如下:
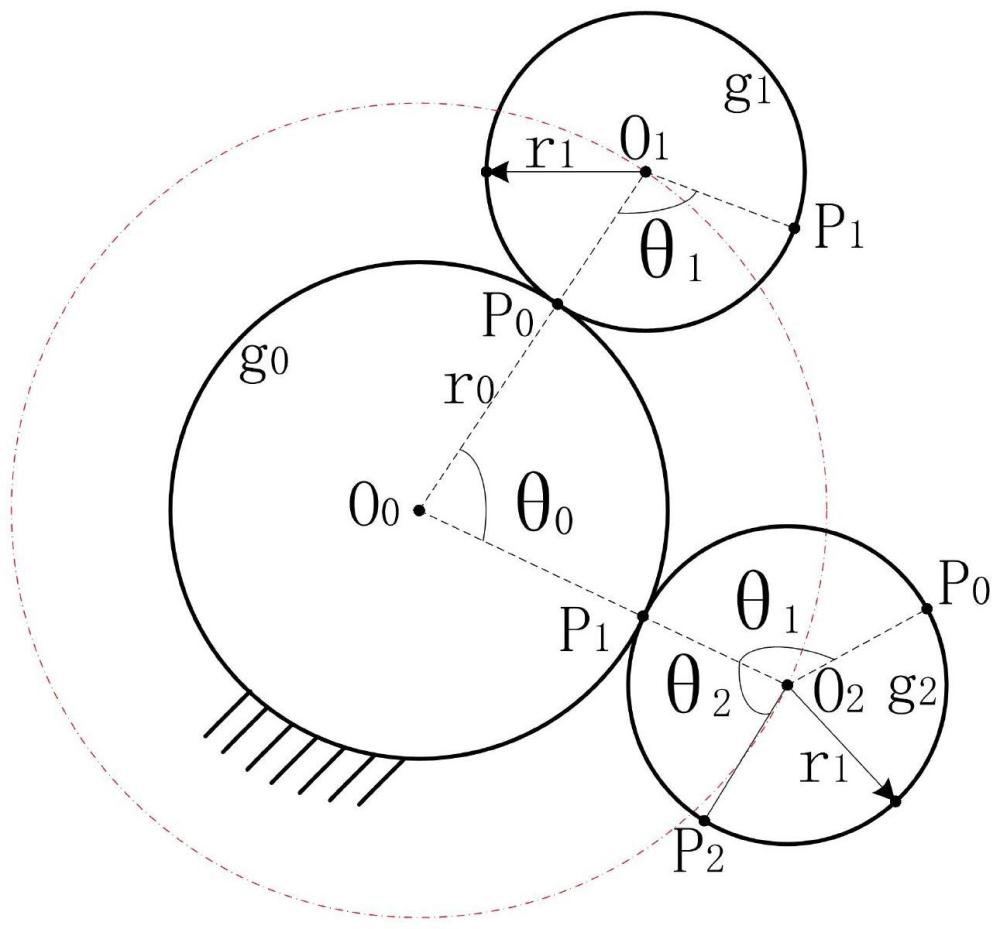
5、基于啮合原理,当太阳轮运动时,两行星轮相对其纯滚动;将第一个行星轮滚动到第二个行星轮的位置,使第一个行星轮节圆上的p1点刚好成为第二个行星轮的节点;另在第二个行星轮节圆上取一点p2点,使得p202平行于o0o1,则有:
6、θ2=θ0 (1)
7、根据上述几何关系可知:
8、θall=θ1+θ2 (2)
9、θall=θ1+θ2 (3)
10、其中,θ0为第二个行星轮的相位角,θ1为第一个行星轮的节圆上任意一点p1的相位角,θ2为第二个行星轮的节圆上任点意一点p2的相位角;
11、由两行星轮相对太阳轮纯滚动,则有:
12、l1=l0 (4)
13、其中:l1为行星轮滚动的弧长,l0为太阳轮上行星轮滚动对应的弧长;
14、
15、故:
16、θ1r1=θ0r0 (6)
17、将式(6)带入式(2-3)可得:
18、
19、式中:
20、
21、
22、式中:z0为太阳轮齿数,z1为行星轮齿数,m为齿轮模数;
23、将式(7)化简可得:
24、
25、设花键齿数为z3,第一个行星轮g1逆时针转动k个花键齿,使第一个行星轮g1回到初始相位,则有:
26、
27、将式(8)带入式(9)可得:
28、
29、由于:
30、z1,z3,n≠0
31、则得到具有两个行星轮的rv减速器的配齿模型为:
32、(z1+z0+jn)z3=knz1(j∈r;k∈r+) (11)
33、其中,n为正整数。
34、本发明的上述目的之二通过以下技术方案来实现:
35、一种rv减速器的配齿模型构建方法,所涉及的rv减速器主要包括太阳轮、行星轮、曲柄轴、摆线轮、针齿壳;所述太阳轮为动力输入件,所述行星轮与太阳轮啮合,每个行星轮的中心孔通过花键与一曲柄轴的一端连接,曲柄轴的偏心部与摆线轮配合,摆线轮通过针齿销与针齿壳啮合,曲柄轴另一端连接输出盘,实现动力输出;当设计的行星轮为两个以上时,配齿过程如下:
36、取行星轮的个数为n,取第i个行星轮为计算对象,1<i≤n;
37、基于啮合原理,当太阳轮运动时,两行星轮相对其纯滚动,将第一个行星轮滚动到第i个行星轮的位置,使第一个行星轮节圆上的p1点刚好成为第i个行星轮的节点;另在第i个行星轮节圆上取一点pi2点,使得pi2oi平行于o0o1,则有:
38、θi2=θi0 (12)
39、对于第i个行星轮,则:
40、
41、(i=1,2,…,n-1)
42、其中,θi0为第i个行星轮的相位角,θi2为第i个行星轮的节圆上任点意一点pi2的相位角;
43、根据上述几何关系可知:
44、
45、由于:
46、
47、(j∈r;k∈r+)
48、式中:z1为行星轮齿数,z3为花键齿数。
49、则:
50、
51、由于:
52、z1,z3,n≠0
53、则具有两个以上行星轮的rv减速器的配齿模型为:
54、(iz1+iz0+jn)z3=knz1 (17)
55、(j∈r;k∈r+)
56、(i=1,2,…,n-1)。
57、本发明具有的优点和积极效果为:
58、本发明基于啮合原理建立了rv减速器的配齿模型,提出了满足不同型号不同传动比rv减速器的配齿方程,具有较好的通用性,可以大大提高产品的设计效率,增加了rv减速器的减速比数量,更好的满足客户对就rv减速器减速比多样性的需求。
技术特征:
1.一种rv减速器的配齿模型构建方法,所涉及的rv减速器主要包括太阳轮、行星轮、曲柄轴、摆线轮、针齿壳;所述太阳轮为动力输入件,所述行星轮与太阳轮啮合,每个行星轮的中心孔通过花键与一曲柄轴的一端连接,曲柄轴的偏心部与摆线轮配合,摆线轮通过针齿销与针齿壳啮合,曲柄轴另一端连接输出盘,实现动力输出;其特征在于:当设计的行星轮为两个时,配齿过程如下:
2.一种rv减速器的配齿模型构建方法,所涉及的rv减速器主要包括太阳轮、行星轮、曲柄轴、摆线轮、针齿壳;所述太阳轮为动力输入件,所述行星轮与太阳轮啮合,每个行星轮的中心孔通过花键与一曲柄轴的一端连接,曲柄轴的偏心部与摆线轮配合,摆线轮通过针齿销与针齿壳啮合,曲柄轴另一端与连接输出盘,实现动力输出;其特征在于:
技术总结
本发明涉及一种RV减速器的配齿模型构建方法,所涉及的RV减速器主要包括太阳轮、行星轮、曲柄轴、摆线轮、针齿壳;所述太阳轮为动力输入件,所述行星轮与太阳轮啮合,每个行星轮的中心孔通过花键与一曲柄轴的一端连接,曲柄轴的偏心部与摆线轮配合,摆线轮通过针齿销与针齿壳啮合,曲柄轴另一端连接输出盘,实现动力输出;本配齿方法基于啮合原理建立了RV减速器的配齿模型,配齿模型包括具有两个行星轮的RV减速器的配齿模型和具有两个以上的行星轮的RV减速器的配齿模型,提出了满足不同型号不同传动比RV减速器的配齿方程,具有较好的通用性。
技术研发人员:黄玉成,王昭,韩忠皓,马明山,蔡智渊
受保护的技术使用者:天津旗领机电科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!