一种基于车路协同的车辆换道意图识别方法及系统与流程
本发明涉及车路协同领域,具体涉及一种基于车路协同的车辆换道意图识别方法及系统。
背景技术:
1、在现代交通中,车辆换道是一项常见的交通行为,合理规范的使用转向灯可以较为明确的表达换道意图,但是在未开启转向灯、转向灯开启不及时和转向灯开启错误等情形下容易引发安全事故。因此,准确地识别车辆的换道意图对于车辆行车安全至关重要。
2、在过去的研究中,有许多基于车辆传感器数据和机器学习算法的方法被提出来识别车辆的换道意图,其中包括使用车辆的轨迹数据、雷达数据、相机图像或者传感器融合的方法。这些方法通常使用模式识别、机器学习或深度学习技术来分析和预测车辆的换道意图,但是缺乏对高精地图数据的使用和关键特征的提取,导致识别准确率不高。
3、车路协同环境下,自车可以获取v2x广播的高精地图和周边交通参与者信息,再结合自身高精度定位,可以获得车辆车道级定位数据,从中分析出车辆的车道偏移率、横纵向加速度、车辆航向角与车道中心线夹角等微观、精细数据,实现车辆换道意图的识别,这极大提升换道意图识别的准确性。
4、目前车辆换道意图识别技术主要是通过搜集车辆行驶过程中道路环境、驾驶员状态、车辆行驶状态、周边交通参与者状态等数据,进行数据预处理并提取关键特征,采用机器学习或深度学习方法进行模型训练,再结合实时数据进行模型推理,最终得到换道意图。
5、但是诸多方法存在数据来源单一、数据质量差、关键特征缺失、未充分考虑时序信息等问题。例如专利cn113581206a,其技术方案只考虑车辆横向加速度、航向角、方向盘转角、车速、纵向加速度等车辆状态数据,未引入车道偏移率、车辆航向角与车道中心线夹角和转向灯状态等关键数据,这些特征对于模型分类的效果影响甚大;例如专利cn110569783b,虽然采用高斯概率密度函数和隐马尔可夫理论进行建模,但是对于换到意图时序信息采集的时间窗长度不够,且隐马尔可夫理论假设当前状态只与前一个状态有关,不能很好地处理长距离依赖关系的问题。
技术实现思路
1、根据背景技术提出的问题,本发明提供一种基于车路协同的车辆换道意图识别方法及系统,所述系统可以实现路侧和车端数据实时交互;所述方法可以在车辆正常行驶时识别出车辆换道意图,基于意图识别结果能够为驾驶员提供可靠的换道提醒服务。接下来对本发明做进一步地阐述。
2、一种基于上述基于车路协同的车辆换道意图识别方法,包括以下步骤:
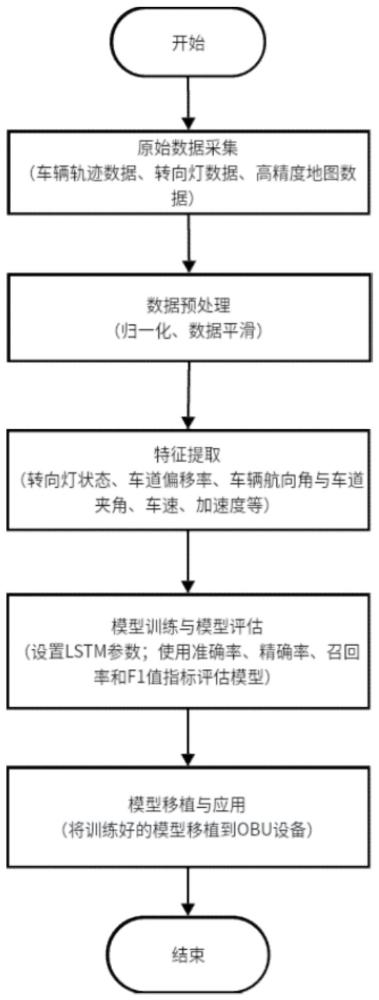
3、s1,原始数据采集,包括获取高精度地图数据、转向灯数据、车辆轨迹数据,并采集从换道意图阶段到换道过程阶段共8s的轨迹数据;
4、s2,数据预处理,对数据进行归一化和平滑处理;
5、s3,特征提取,提取出车辆转向灯状态、车辆车道偏移率、车辆航向角与车道方向夹角、车辆绝对速度、车辆横向速度、车辆加速度和车辆横向位置、车辆纵向位置共八类典型特征作为模型输入,表征不同驾驶行为的样本在表达形式上为8维不同长度的时间序列,构成8*t的矩阵zt,则有
6、s4,模型训练与模型评估;
7、s5,模型移植与应用,保存训练完成的模型权重和架构,将模型加载到嵌入式设备中,运行得到换道意图识别结果。
8、进一步地,换道过程分为车道保持阶段、车辆换道意图阶段、车辆换道过程阶段、车辆换道完成阶段,换道过程中车辆历史轨迹有三个时刻点即换道起点、换道点、换道终点,所述换道点为车辆轨迹与车道线的交点;换道起点满足:从换道点开始沿时间轴反向遍历采样点,连续三个时刻采样点的角度|θ|≤θs,θs为换道起点航向角阈值,则取第一次的点作为换道起点;所述换道终点满足:从换道点开始沿时间轴正向便利了采样点,连续三个时刻采样点的角度|θ|≤θe,θe换道终点航向角阈值,则取第一次的点作为换道终点;换道起点和换道终点之间的点都被定义为换道过程点。取三个点是为了降低噪声波动引起的误判。
9、进一步地,模型训练和模型评估步骤中,采用lstm思想,引入三个门控来控制信息的流动,这三个门控分别是输入门、遗忘门和输出门,其中,输入门用于控制当前时刻的输入数据是否需要被记忆,遗忘门用于控制前一时刻的记忆是否需要被遗忘,输出门用于控制当前时刻的输出是否需要来自记忆单元。
10、一种基于车路协同的车辆换道意图识别系统,系统包括路侧单元rsu和车载单元obu,所述rsu包括c-v2x短程通信模块、高精度地图模块,所述obu包括c-v2x短程通信模块、高精度定位模块、地图匹配模块、换道意图识别模块;其中:
11、所述c-v2x短程通信模块用于实现路侧数据和车载数据的低时延、高可靠交互;
12、所述高精度地图模块用于实现路段或者交叉路口地图的采集和制作;
13、所述高精度定位模块用于为车辆提供车道级定位服务;
14、所述地图匹配模块基于路网高精度地图和高精度定位,用于获取车辆在地图中准确位置,包括所在路口、所在车道以及车道偏移率;
15、所述换道意图识别模块用于结合车辆轨迹数据、can数据、航向角、速度、加速度以及所在车道信息实时识别车辆向左变道、向右变道、保持直行的意图。
16、有益效果:与现有技术相比,本发明通过实车换道数据分析,提取出车道偏移率、车辆航向角和车道线夹角、转向灯状态这三个关键特征参与模型训练,并选择8s作为换道意图时间窗长度,充分获取意图产生到换道点的数据;采用长短时记忆网络lstm作为训练模型,该模型在处理时序数据时,能够有效记忆前面的信息,并根据当前时刻的输入和前面的信息推断出当前时刻的输出。
技术特征:
1.一种基于车路协同的车辆换道意图识别方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的车辆换道意图识别方法,其特征在于,换道过程分为车道保持阶段、车辆换道意图阶段、车辆换道过程阶段、车辆换道完成阶段,换道过程中车辆历史轨迹有三个时刻点即换道起点、换道点、换道终点;
3.根据权利要求2所述的车辆换道意图识别方法,其特征在于,步骤s2中的数据归一化,采用最大-最小标准化法对数据进行归一化处理,最大-最小标准化是对原始数据进行线性变换,所选数据变量d的最小值和最大值分别为mind和maxd,将d的一个原始数据x通过最小-最大标准化映射到区间[0,1],得到新的数据x′,其中x′表示为:
4.根据权利要求2所述的车辆换道意图识别方法,其特征在于,步骤s2中的数据平滑,是在进行特征提取之前对原始数据进行滤波处理,选取滑动平均法、多项式拟合平滑、savitzky-golay滤波中任意一种滤波算法。
5.根据权利要求1所述的车辆换道意图识别方法,其特征在于,步骤s5中的模型训练与模型评估步骤,采用lstm思想,引入输入门、遗忘门和输出门共三个门控来控制信息的流动,其中,输入门用于控制当前时刻的输入数据是否需要被记忆,遗忘门用于控制前一时刻的记忆是否需要被遗忘,输出门用于控制当前时刻的输出是否需要来自记忆单元;
6.根据权利要求5所述的车辆换道意图识别方法,其特征在于,步骤s4中采用pytorch进行模型训练。
7.根据权利要求6所述的车辆换道意图识别方法,其特征在于,步骤s5的模型移植与应用具体包括:
8.一种基于车路协同的车辆换道意图识别系统,其特征在于,系统包括路侧单元rsu和车载单元obu,所述rsu包括c-v2x短程通信模块、高精度地图模块,所述obu包括c-v2x短程通信模块、高精度定位模块、地图匹配模块、换道意图识别模块;其中:
技术总结
本发明公开了一种基于车路协同的车辆换道意图识别方法及系统,该方法包括以下步骤:S1,原始数据采集,采集从换道意图阶段到换道过程阶段共8s的轨迹数据;S2,数据预处理,对数据进行归一化和平滑处理;S3,特征提取,提取出包括车道偏移率、车辆航向角和车道线夹角、转向灯状态在内的8个关键特征作为模型输入,不同驾驶行为的样本在表达形式上为8维不同长度的时间序列;S4,模型训练与模型评估,采用长短时记忆网络LSTM作为训练模型,该模型在处理时序数据时,能够有效记忆前面的信息,并根据当前时刻的输入和前面的信息推断出当前时刻的输出;S5,模型移植与应用,采用libTorch进行移植,实现在OBU上的换道意图实时获取。本发明能够提升车辆换道意图识别的准确性,提升车辆行驶的安全性。
技术研发人员:王谦,朱芸,张爆,罗明波,刘云鹏
受保护的技术使用者:浙江海康智联科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!