一种SinCos位置编码器椭圆校正方法与流程
本发明涉及电机检测,尤其涉及一种sincos位置编码器椭圆校正方法。
背景技术:
1、在电机控制中,准确测量电机转子的角度是非常重要的。现有技术一般采用sincos位置编码器测量电机转子的角度,并将其转化为数字信号供控制系统使用。
2、然而,由于制造和安装误差等因素,sincos位置编码器的输出信号可能存在误差,其中椭圆误差是一种常见的误差类型。椭圆误差指的是位置编码器输出信号与真实转子角度之间的偏差呈现椭圆形状,降低了测量的准确性和稳定性。
技术实现思路
1、为解决上述问题,本发明提供一种sincos位置编码器椭圆校正方法,通过差分输出rps模型计算椭圆实际中心点,将位置编码器的输出信号与计算的椭圆实际中心点进行比较,计算出旋转、平移和缩放参数,得到物体的准确位置和姿态,有效提高位置测量精度,减小位置误差周期性波动,提高系统稳定性和控制性能,尤其在电机的高精度和高速应用中更加明显。
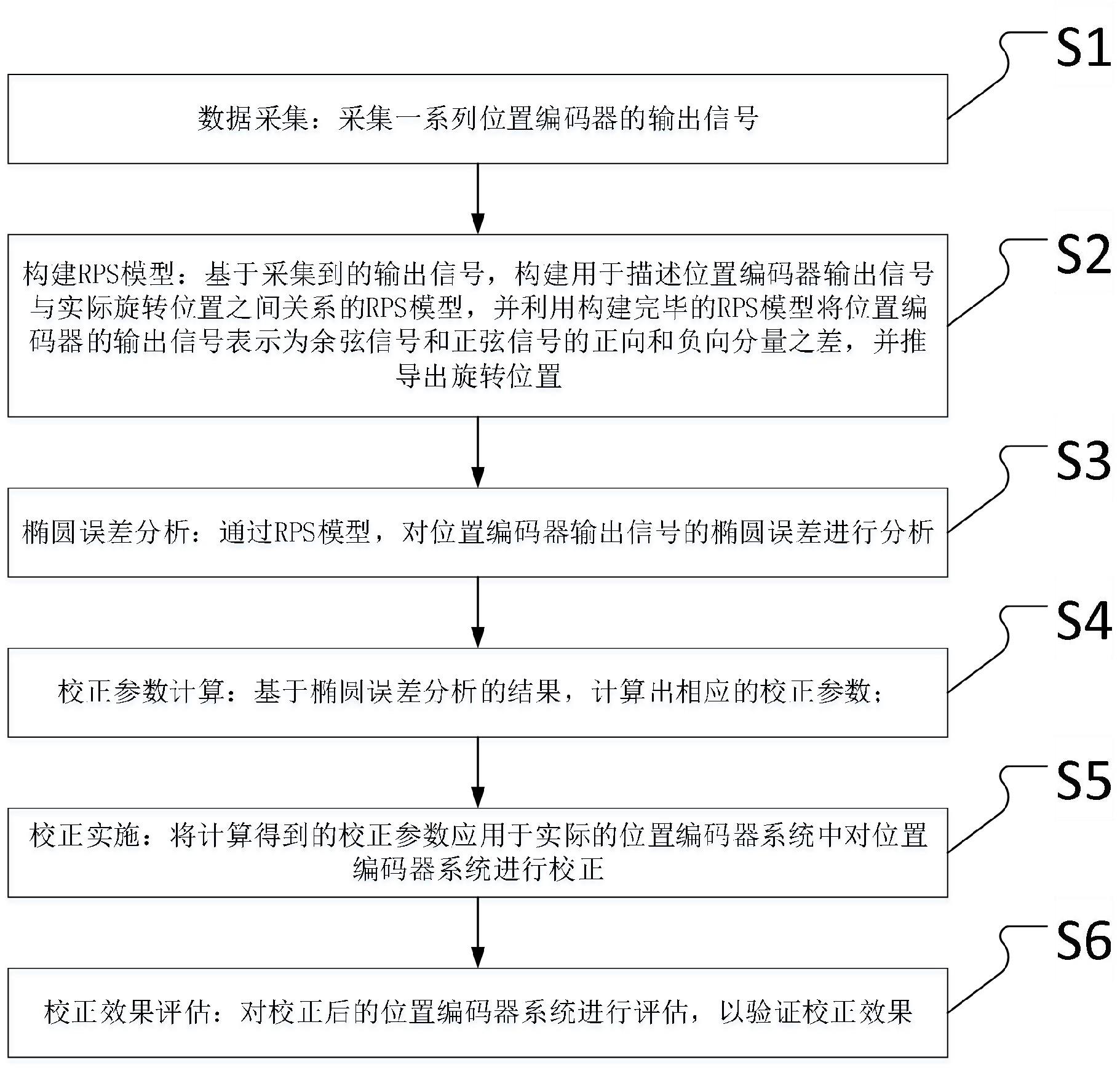
2、为实现上述目的,本发明提供了一种sincos位置编码器椭圆校正方法,包括以下步骤:
3、s1、数据采集:采集一系列位置编码器的输出信号;
4、s2、构建rps模型:基于采集到的输出信号,构建用于描述位置编码器输出信号与实际旋转位置之间关系的rps模型,并利用构建完毕的rps模型将位置编码器的输出信号表示为余弦信号和正弦信号在x轴和y轴方向上的分量,并推导出旋转位置;
5、s3、椭圆误差分析:通过rps模型,对位置编码器输出信号的椭圆误差进行分析;
6、s4、校正参数计算:基于椭圆误差分析的结果,计算出相应的校正参数;
7、s5、校正实施:将计算得到的校正参数应用于实际的位置编码器系统中对位置编码器系统进行校正;
8、s6、校正效果评估:对校正后的位置编码器系统进行评估,以验证校正效果。
9、优选的,步骤s1所述的输出信号包括旋转位置和与旋转位置对应的sincos信号值。
10、优选的,步骤s2所述的rps模型表达式如下:
11、 ;
12、 ;
13、其中,θ表示旋转位置,x和y分别表示位置编码器输出信号在x轴和y轴方向上的分量;、、、均是模型的参数,具体含义如下:
14、:余弦信号在x轴方向上的幅值;
15、:正弦信号在x轴方向上的幅值;
16、:余弦信号在x轴方向上的偏移量;
17、:正弦信号在x轴方向上的偏移量;
18、理想状态下,sincos编码器输出信号的x、y的幅值:
19、 ;
20、偏移量:
21、 ;
22、得到:
23、 ;
24、 ;
25、 ;
26、 ;
27、其中,表示位置编码器输出信号在x和y方向上的合成幅值,和分别表示合成幅值的最小值和最大值。
28、优选的,步骤s3具体包括以下步骤:
29、实际状态下,sincos编码器输出信号存在幅值与偏移量误差,通过rps模型,对位置编码器输出信号x与y方向上的幅值与偏移量进行分析,判断是否与理想状态下的值相等。
30、优选的,步骤s4具体包括以下步骤:
31、校正参数计算:基于椭圆误差分析的结果,计算出相应的校正参数,以用于对位置编码器输出信号进行校正,减小椭圆误差;其补偿系数计算结果如下:
32、 ;
33、 ;
34、 ;
35、 ;
36、 ;
37、其中,、为偏移补偿系数,、为x、y的实际幅值,、、、分别为x、y的最大与最小值,为y的幅值补偿系数。
38、优选的,步骤s5具体包括以下步骤:
39、将计算得到的校正参数应用于实际的位置编码器系统中,补偿后的x、y的实际计算公式如下:
40、 ;
41、 ;
42、其中:和分别表示位置编码器输出信号在x轴和y轴方向上的实际分量。
43、本发明具有以下有益效果:
44、可有效提高位置测量精度,减小位置误差周期性波动,提高系统稳定性和控制性能。
45、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种sincos位置编码器椭圆校正方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种sincos位置编码器椭圆校正方法,其特征在于:步骤s1所述的输出信号包括旋转位置和与旋转位置对应的sincos信号值。
3.根据权利要求1所述的一种sincos位置编码器椭圆校正方法,其特征在于:步骤s2所述的rps模型表达式如下:
4.根据权利要求1所述的一种sincos位置编码器椭圆校正方法,其特征在于:步骤s3具体包括以下步骤:
5.根据权利要求1所述的一种sincos位置编码器椭圆校正方法,其特征在于:步骤s4具体包括以下步骤:
6.根据权利要求1所述的一种sincos位置编码器椭圆校正方法,其特征在于:步骤s5具体包括以下步骤:
技术总结
本发明公开了一种SinCos位置编码器椭圆校正方法,包括以下步骤:S1、数据采集;S2、构建RPS模型,并利用构建完毕的RPS模型将位置编码器的输出信号表示为余弦信号和正弦信号的正向和负向分量之差,并推导出旋转位置;S3、椭圆误差分析:通过RPS模型,对位置编码器输出信号的椭圆误差进行分析;S4、校正参数计算:基于椭圆误差分析的结果,计算出相应的校正参数;S5、校正实施:将计算得到的校正参数应用于实际的位置编码器系统中;S6、校正效果评估:对校正后的位置编码器系统进行评估。本发明采用上述SinCos位置编码器椭圆校正方法,有效提高位置测量精度,减小位置误差周期性波动,提高系统稳定性和控制性能。
技术研发人员:董作民,刘兆勇
受保护的技术使用者:格陆博科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!