一种基于三维激光的净空分析系统及方法与流程
本发明涉及净空分析领域,尤其涉及一种基于三维激光的净空分析系统及方法。
背景技术:
1、净空分析作为一种常见应用场景,目的在于分析周围环境物体对当前活动对象的遮挡影响,这在道路交通、电力、建筑、测绘等许多行业中均能得到体现。例如,城市建设中,需要调查行道树和周围电力线的距离,判断是否存在安全隐患。目前,针对净空分析基本采用传统量测手段,通过人工手动量测,亦或是建立复杂的测绘方案。存在如下问题:
2、(1)对于人工量测方式,量测误差极大程度依赖于操作人员能力,精度不统一,后期复测又会带来时间的浪费。
3、(2)传统量测效率低、速度慢,影响其它活动的正常进行,拉长项目周期。
4、(3)在一些恶劣的环境中,传统量测手段也很难达到目的,无法获得真实有效的测量数据。
5、(4)在一些复杂的应用场景中,需要通过建立复杂的测绘方案才能实现,测量方案通用性差、设计投入大、过程复杂、维护成本高等缺陷。
技术实现思路
1、本发明的目的在于提供一种基于三维激光的净空分析系统及方法,解决了现有技术中指出的上述技术问题。
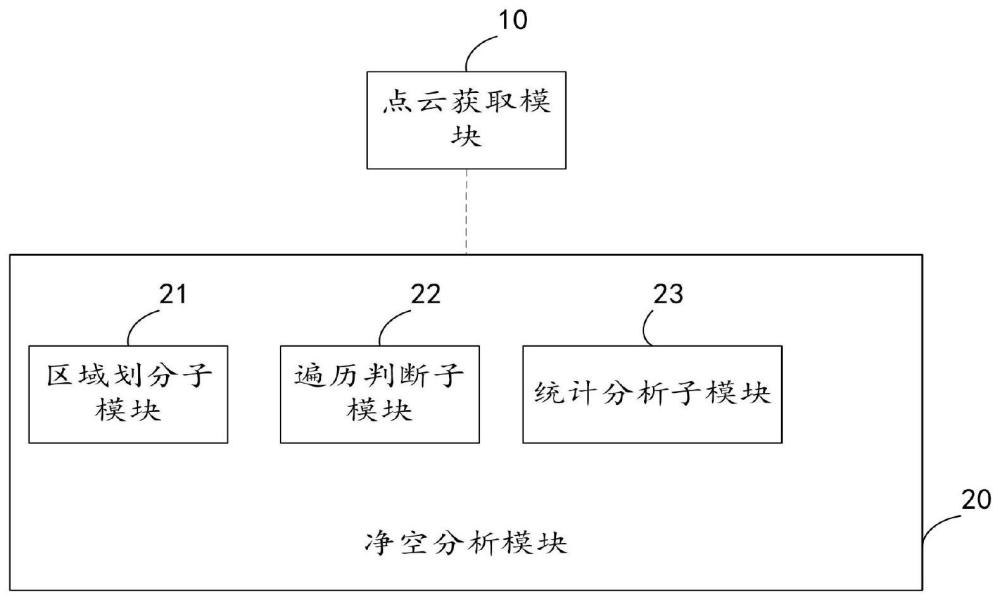
2、本发明提供了一种基于三维激光的净空分析系统,包括点云获取模块、净空分析模块;
3、其中,所述点云获取模块,用于通过三维激光扫描,采集获取目标区域的初始点云数据后;对所述初始点云数据进行预处理及分类操作,获取分类点云数据;
4、所述净空分析模块,用于根据所述分类点云数据,获取当前目标区域的净空基线路径矢量;根据预先设置的截面模板参数,获取净空区域;确定所述净空基线路径矢量与所述分类点云数据为输入数据;基于所述输入数据对所述净空区域进行净空分析后,统计得到遮挡数据。
5、较佳的,所述分类点云数据包括分类点云的类别及分类点云坐标。
6、较佳的,所述净空分析模块,包括区域划分子模块、遍历判断子模块、统计分析子模块;
7、其中,所述区域划分子模块,用于基于所述截面模板参数,将所述净空区域划分为矩形区域与接缝圆弧区域;
8、所述遍历判断子模块,用于遍历所述分类点云数据,随机选择任意一个分类点云数据作为目标分类点云数据;判断当前所述目标分类点云数据落入所述矩形区域还是所述接缝圆弧区域;
9、所述判断结果分析子模块,用于若判断当前所述目标分类点云数据落入所述矩形区域,则计算当前所述目标分类点云数据在该矩形区域的基线投影点所处在的横截面上的矩形局部投影坐标点(x,y);通过pnpoly算法判断所述矩形局部投影坐标点(x,y)是否落在多边形模板内,若是,则确定所述矩形局部投影坐标点为第一目标局部投影坐标点;
10、若判断当前所述目标分类点云数据落入所述接缝圆弧区域,则获取当前所述目标分类点云数据对应的多个节点坐标;基于当前所述目标分类点云数据及多个所述节点坐标,计算获取目标节点坐标;根据当前所述目标分类点云数据及所述目标节点坐标,获取目标横截面;计算获取当前所述目标分类点云数据在所述目标横截面上的接缝局部投影坐标点(x,y);并确定所述接缝局部投影坐标点(x,y)为第二目标局部投影坐标点;
11、所述统计分析子模块,用于对所有所述第一目标局部投影坐标点与所有所述第二目标局部投影坐标点进行统计,得到遮挡数据。
12、相应地,本发明还提出了一种基于三维激光的净空分析方法,包括如下操作步骤:
13、通过三维激光扫描,采集获取目标区域的初始点云数据后;对所述初始点云数据进行预处理及分类操作,获取分类点云数据;
14、根据所述分类点云数据,获取当前目标区域的净空基线路径矢量;根据预先设置的截面模板参数,获取净空区域;确定所述净空基线路径矢量与所述分类点云数据为输入数据;基于所述输入数据对所述净空区域进行净空分析后,统计得到遮挡数据。
15、较佳的,所述净空基线路径矢量支持轨迹、矢量线两种模式;
16、其中,所述轨迹通常为车载采集系统设备的行驶轨迹;
17、所述矢量线可通过基于点云的自动化矢量提取或手动绘制获得,通常为电力线。
18、较佳的,所述截面模板参数包括矩形、梯形、圆形以及自定义模板参数。
19、较佳的,所述输入数据支持点云数据类型和矢量线数据类型两种数据类型模式。
20、较佳的,所述基于所述输入数据对所述净空区域进行净空分析后,统计得到遮挡数据,包括如下操作步骤:
21、基于所述截面模板参数,将所述净空区域划分为矩形区域与接缝圆弧区域;
22、遍历所述分类点云数据,随机选择任意一个分类点云数据作为目标分类点云数据;判断当前所述目标分类点云数据落入所述矩形区域还是所述接缝圆弧区域;
23、若判断当前所述目标分类点云数据落入所述矩形区域,则计算当前所述目标分类点云数据在该矩形区域的基线投影点所处在的横截面上的矩形局部投影坐标点(x,y);通过pnpoly算法判断所述矩形局部投影坐标点(x,y)是否落在多边形模板内,若是,则确定所述矩形局部投影坐标点为第一目标局部投影坐标点;
24、若判断当前所述目标分类点云数据落入所述接缝圆弧区域,则获取当前所述目标分类点云数据对应的多个节点坐标;基于当前所述目标分类点云数据及多个所述节点坐标,计算获取目标节点坐标;根据当前所述目标分类点云数据及所述目标节点坐标,获取目标横截面;计算获取当前所述目标分类点云数据在所述目标横截面上的接缝局部投影坐标点(x,y);并确定所述接缝局部投影坐标点(x,y)为第二目标局部投影坐标点(x,y);
25、对所有所述第一目标局部投影坐标点与多个第二目标局部投影坐标点(x,y)进行统计,得到遮挡数据。
26、与现有技术相比,本发明实施例至少存在如下方面的技术优势:
27、分析本发明提供的上述一种基于三维激光的净空分析系统及方法可知,在具体应用时,通过采集点云后进行预处理,进而进行分类得到分类点云数据,解决了人工量测的低效率的问题,规避了因为人工操作产生的不良因素;并且利用三维激光点云作为数据源,前期数据采集方便,后期处理更加灵活,并且分析结果精度更高,几乎不需要重复采集便可获得完整、准确的目标区域点云数据;可以根据实际应用需要进行点云分类,例如对于电力应用,可分出电力线、电线杆、地面、高植被点等类别,有利于后期净空分析的精细化;
28、进而利用分类点云数据得到净空基线路径矢量,并通过预设的截面模板参数(截面模板参数包含全面,实用性广,能够涵盖实际应用的中大多数场景)进行获取净空区域;进一步地进行净空分析,得到分析结果;其中,可通过点云模式与矢量线模式进行分析,点云模式使得三维地物的净空分析十分方便,矢量线模式则更加适用于电力线之间的空间分析。
技术特征:
1.一种基于三维激光的净空分析系统,其特征在于,包括点云获取模块、净空分析模块;
2.根据权利要求1所述的一种基于三维激光的净空分析系统,其特征在于,所述分类点云数据包括分类点云的类别及分类点云坐标。
3.根据权利要求2所述的一种基于三维激光的净空分析系统,其特征在于,所述净空分析模块,包括区域划分子模块、遍历判断子模块、统计分析子模块;
4.一种基于三维激光的净空分析方法,其特征在于,包括如下操作步骤:
5.根据权利要求4所述的一种基于三维激光的净空分析方法,其特征在于,所述净空基线路径矢量支持轨迹、矢量线两种模式;
6.根据权利要求5所述的一种基于三维激光的净空分析方法,其特征在于,所述截面模板参数包括矩形、梯形、圆形以及自定义模板参数。
7.根据权利要求6所述的一种基于三维激光的净空分析方法,其特征在于,所述输入数据支持点云数据类型和矢量线数据类型两种数据类型模式。
8.根据权利要求7所述的一种基于三维激光的净空分析方法,其特征在于,所述基于所述输入数据对所述净空区域进行净空分析后,统计得到遮挡数据,包括如下操作步骤:
技术总结
本发明公开了一种基于三维激光的净空分析系统及方法,通过采集点云后进行预处理,进而进行分类得到分类点云数据,解决了人工量测的低效率的问题,规避了因为人工操作产生的不良因素;并且利用三维激光点云作为数据源,前期数据采集方便,后期处理更加灵活,并且分析结果精度更高,几乎不需要重复采集便可获得完整、准确的目标区域点云数据;并根据实际应用需要进行点云分类,有利于后期净空分析的精细化;进而利用分类点云数据得到净空基线路径矢量,并通过预设的截面模板参数进行获取净空区域;进一步地进行净空分析,得到分析结果。
技术研发人员:张晗,王爽,朱冬波,张少彬,冯宇,刘康,陶春夏,魏思铭,高志明
受保护的技术使用者:北京数字绿土科技股份有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!