一种基于改进YOLOv8的无人机图像小目标检测方法
本发明属于深度学习目标检测,尤其涉及基于改进yolov8的无人机图像小目标检测方法
背景技术:
1、近些年来,基于卷积神经网络的目标检测算法在遥感图像处理,无人机导航,自动驾驶,医学诊断,人脸识别,缺陷检测等领域得到了广泛的应用和发展。常规的目标检测算法已经基本能够满足各种场景下的需求,但是这些算法主要是面对大、中目标的,对于无人机鸟瞰视图的小目标来说,由于有效特征少,难以提取到足够的特征信息,效果是不尽人意的。确切的说,即使是最先进的探测器,在检测小型和大中型物体方面仍然存在巨大的性能差距。
2、目前流行的目标检测器通常包含一个主干网络和一个检测头,后者的决策取决于前者的表示输出,这被证明是有效的。但是小目标特征信息本来就少,经过多次下采样之后,几乎得不到保留,因此网络很难学习到有用的信息,检测头也无法做出正确的决策,这对小目标检测来说是致命的。因此目前的检测器对于无人机小目标的检测精度比较低。
技术实现思路
1、本发明目的在于提供一种基于改进yolov8的无人机小目标识别检测方法,以解决对无人机图片检测准确率低的技术问题。
2、为解决上述技术问题,本发明的一种基于改进yolov8的无人机小目标识别检测方法的具体技术方案如下:
3、一种基于改进yolov8的无人机小目标识别检测方法,
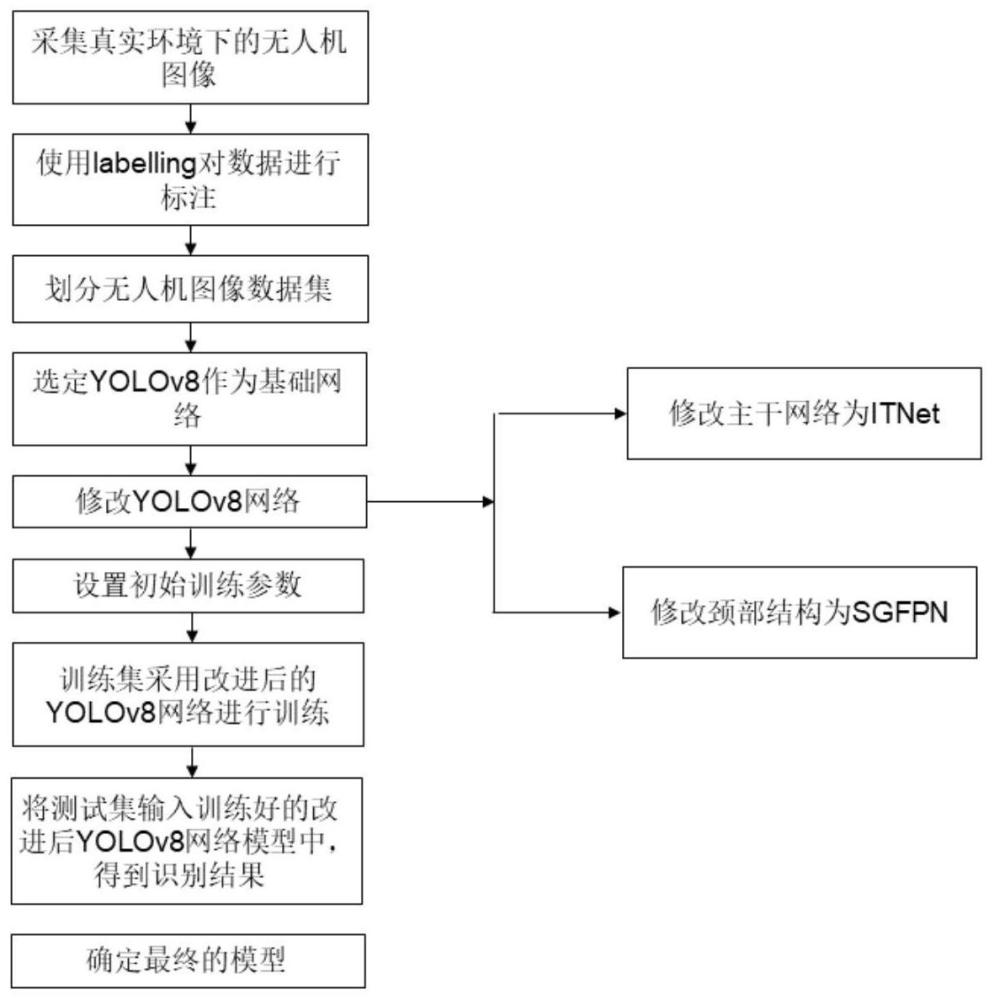
4、步骤1、数据由无人机在真实生活环境下拍摄的图片所得,并标注人、车辆等十种图像,建立无人机图片数据集,使用mosaic数据增强方法对数据集进行数据增强;
5、步骤2、以yolov8网络结构为基准网络,引入主干网络itnet(inverted trianglenet),使用了动态卷积odconv来代替conv卷积,使用颈部模块sgfpn,引入特征融合模块csf,carafe上采样方法代替最近邻采样,使用改进后的yolov5网络结构作为无人机小目标识别网络,通过训练得到无人机小目标识别检测的深度学习模型;
6、步骤3、将待检测识别的无人机小目标图像输入至无人机小目标识别检测的深度学习模型中进行检测。
7、进一步的,检测网络基于yolov8网络结构进行修改,包括4个c2f模块、1个sppf模块、6个odconv模块、7个csf模块、7个concat模块,3个上采样模块、6个conv模块。
8、进一步的,c2f模块包括依次级联的3×3卷积层、bn(batch normalization)层和silu激活函数层;
9、sppf模块包括依次级联的5×5的全局池化层,结果通过concat拼接;
10、conv模块包括依次级联的1×1卷积层、bn层和relu激活函数层;
11、odconv模块表示为
12、y=(αw1⊙αf1⊙αc1⊙αs1⊙w1+…+αwn⊙αfn⊙αcn⊙αsn⊙wn)*x
13、其中,x∈r^(h×ω×c_in)和y∈r^(h×ω×c_out)分别表示输入特征和输出特征(通道数为c_in/c_out,特征的宽和高分别为h、ω),wi表示由c_out滤波器(w_i^m∈r^(k×k×c_in),m=1,…,c_out)组成的第i个卷积核;α_wi∈r表示卷积核w_i的注意标量;α_si∈r^(k×k),α_ci∈r^(c_in)和α_fi∈r^(c_out)表示三个新引入的注意,分别沿卷积核w_i的空间维度、输入通道维度和输出通道维度计算;⊙表示沿核空间不同维度的乘法运算。
14、csf模块包括三个分支,第一个分支为依次级联的3×3repconv卷积层,第二分支为pconv和conv模块,第三个分支为conv模块,三个分支的输出通过concat层拼接;
15、进一步的,对无人机图像数据集进行预处理的方法为:将使用voc标注模式下生成的xml文件转换成yolo训练所需的txt文件。
16、进一步的,所述数据集划分方法为:将60%数据作为训练集,将20%数据作为验证集,20%数据作为测试集。
17、进一步的,设置模型训练参数其中初始学习率为0.01,动量设置为0.937,权重衰减设置为0.0005,训练阈值为0.2,图片尺寸全部归一化为640×640,迭代次数为300,批大小为16;
18、本发明提出的改进yolov8网络,相较于原始yolov8目标检测网络,在无人机小目标的检测任务上,能够实现复杂背景下、小目标物体的准确检测,并且在参数量和计算量上都有所降低。首先,我们设计了一个增加了浅层提取特征卷积个数的主干,它增强了网络对浅层信息的提取,并且利用全维动态卷积进行编码,有效地提高了网络对小目标的特征的提取能力。其次,提出了特征融合模块,以进一步增强网络的多层与特征融合能力。第三,设计了一个颈部结构,增加了对浅层信息的提取,增强了网络对小目标位置信息的挖掘能力。
19、本发明针对低空场景中、地物遮挡多和背景复杂的无人机小目标进行检测,通过深度学习方法来减少人工收集数据与处理数据的人力与时间成本。利用数据增强方式获取更全面,更高质量的数据。
技术特征:
1.一种基于改进yolov8的无人机图像小目标检测方法,其特征在于,包括:
2.根据权利要求1所述的一种基于改进yolov8的无人机图像小目标检测方法,其特征在于:所述步骤1的具体实现方法,包括以下步骤:
3.根据权利要求2所述的一种基于改进yolov8的无人机图像小目标检测方法,其特征在于:所述mosaic数据增广处理方法对给定的图像文件进行一系列图像处理操作,包括随机使用若干张图片,随机缩放,再随机分布进行拼接、裁剪图像、水平翻转图像、将图像旋转90度、降低图像亮度、提高图像亮度、对图像进行模糊处理、向图像中添加椒盐噪声、向图像中添加高斯噪声。
4.根据权利要求1所述的一种基于改进yolov8的无人机图像小目标检测方法,其特征在于:所述步骤2的具体实现方法,包括itnet:在浅层增加了用于特征提取的卷积核的数量,而在深层减少了核的数量以提高计算效率。此外,我们在降采样时使用全维动态卷积odconv,以此来保留物体的全维信息。
5.根据权利要求1所述的一种基于改进yolov8的无人机图像小目标检测方法,其特征在于:所述步骤2的具体实现方法,包括sgfpn:
技术总结
本发明提出了一种基于改进YOLOv8的无人机图像小目标检测方法,包括采集并标注各类无人机拍摄图像,建立无人机图像数据集;基于YOLOv8原始网络,引入主干网络ITNet,使用了动态卷积ODConv来代替Conv卷积,使用颈部模块SGFPN,引入特征融合模块CSF,使用CARAFE上采样方法代替最近邻采样,使用改进后的yolov8网络结构作为无人机图像识别网络,通过训练得到无人机小目标识别检测的深度学习模型,检测无人机图像,实现了对无人机图像的高准确率的检测。
技术研发人员:郭小伟,李俊武,陈跃冲,封征
受保护的技术使用者:电子科技大学长三角研究院(湖州)
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!