一种交通图像增强处理方法及系统与流程
本发明涉及智能交通管理领域,特别涉及一种交通图像增强处理方法及系统。
背景技术:
1、图像增强技术在计算机视觉领域中扮演着至关重要的角色。在物体识别、场景分割、水下应用、机器人感知、基于视频的实时应用和交通监控等多个领域中,图像增强技术都是必不可少的。智能交通必须实时、精确地检测交通物体,如汽车、骑自行车的人、交通信号灯等,以正确地控制决策并确保所需的安全性。为了检测这些物体,智能交通通常使用各种传感器,例如摄像头以及光检测和测距。然而,这些传感器中相机的图像质量往往受到恶劣天气条件的影响,如大雾、暴雨、暴风雪、尘土飞扬的爆炸和弱光条件等。这些恶劣天气条件会导致能见度降低,从而导致道路上交通物体的识别效率降低,并可能引发交通事故。因此,为了提高智能交通的道路安全性和性能,开发有效的图像增强方法是非常必要的。通过图像增强技术能够获得良好的视觉外观或判别特征,可以达到清晰的可见性。这样就能够提高交通物体检测的性能和准确度,从而降低交通事故的风险。
2、目前针对极端天气进行交通图像增强时,通常采用颜色转移技术的粉尘降解图像增强方式或者反向蓝色通道先验策略,然而粉尘无处不在并且非常微小,会导致处理后的图像仍然被灰尘覆盖,无法实现很好的图像增强效果;同时在沙尘暴等能见度低的恶劣天气条件下,还会存在增强后的交通图像对比度低、光晕伪影和曝光不足或者过度等问题。
技术实现思路
1、为解决上述技术问题,本发明提供一种交通图像增强处理方法及系统,可以解决现有恶劣天气条件下交通图像增强效果较差的问题。
2、为实现上述目的,一方面,本发明一种交通图像增强处理方法,所述方法包括:
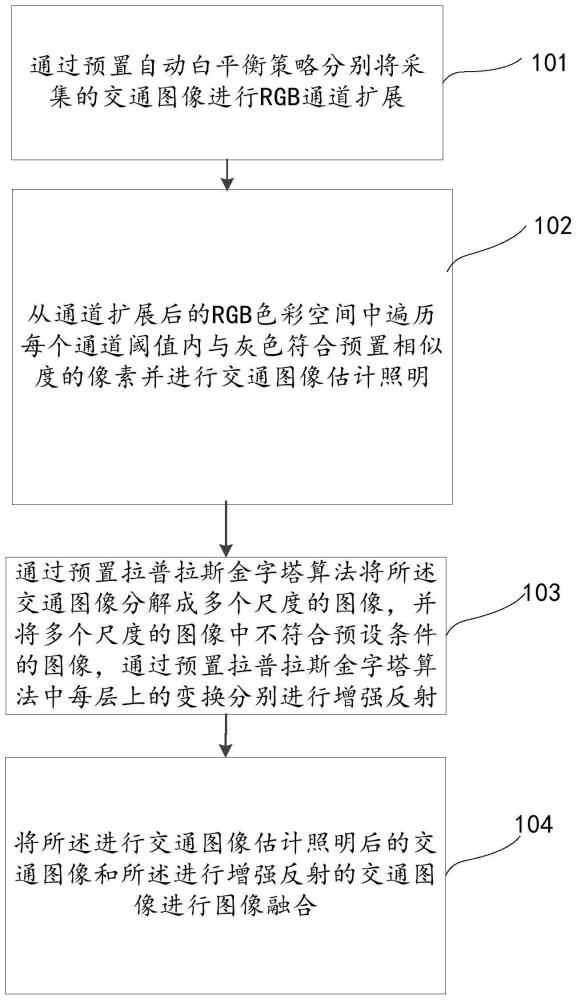
3、通过预置自动白平衡策略分别将采集的交通图像进行rgb通道扩展;
4、从通道扩展后的rgb色彩空间中遍历每个通道阈值内与灰色符合预置相似度的像素并进行交通图像估计照明;
5、通过预置拉普拉斯金字塔算法将所述交通图像分解成多个尺度的图像,并将多个尺度的图像中不符合预设条件的图像,通过预置拉普拉斯金字塔算法中每层上的变换分别进行增强反射;
6、将所述进行交通图像估计照明后的交通图像和所述进行增强反射的交通图像进行图像融合。
7、进一步地,所述通过预置自动白平衡策略分别将采集的交通图像进行rgb通道扩展的步骤包括:根据公式和进行rgb通道扩展,其中,hj为直方图,fv是指图像的累积归一化直方图,pv(i)是像素在强度级别[0:l]之间出现的概率,n=m×n是图像中的像素总数。
8、进一步地,所述从通道扩展后的rgb色彩空间中遍历每个通道阈值内与灰色符合预置相似度的像素并进行交通图像估计照明的步骤包括:
9、根据公式进行交通图像估计照明,其中,将最大值hjmax的每个通道视为一个动态参数,li(x,y)为照明图像,γ为照明图像中具有成本效益的伽马校正参数,为照明覆盖率。
10、进一步地,所述通过预置拉普拉斯金字塔算法将所述交通图像分解成多个尺度的图像,并将多个尺度的图像中不符合预设条件的图像,通过预置拉普拉斯金字塔算法中每层上的变换分别进行增强反射的步骤包括:
11、根据公式分别进行增强反射,其中,拉普拉斯金字塔是通过高斯金字塔logp=log1-log2中模糊图像的两层之间的差异获得的,g(x,y)为通过高斯低通滤波器和隔行扫描子采样得到的不清晰图像,log1为第一个高斯金字塔层log1,log2为对第一层高斯金字塔层进行低通滤波和下采样得到的第二层高斯金字塔层,log2是log1的扩展图像,σ为高斯标准差。
12、进一步地,所述将所述进行交通图像估计照明后的交通图像和所述进行边缘细节提取的交通图像进行图像融合的步骤包括:
13、根据公式进行图像融合,其中,iclear(x,y)为清晰图像,l(x,y)为进行估计照明后的交通图像,logp(x,y)为进进行增强反射后的交通图像,(x,y)是图像中的像素坐标。
14、另一方面,本发明提供一种交通图像增强处理系统,所述系统包括:扩展模块,用于通过预置自动白平衡策略分别将采集的交通图像进行rgb通道扩展;
15、估计照明模块,用于从通道扩展后的rgb色彩空间中遍历每个通道阈值内与灰色符合预置相似度的像素并进行交通图像估计照明;
16、增强反射模块,用于通过预置拉普拉斯金字塔算法将所述交通图像分解成多个尺度的图像,并将多个尺度的图像中不符合预设条件的图像,通过预置拉普拉斯金字塔算法中每层上的变换分别进行增强反射;
17、融合模块,用于将所述进行交通图像估计照明后的交通图像和所述进行增强反射的交通图像进行图像融合。
18、进一步地,所述扩展模块,具体用于根据公式和进行rgb通道扩展,其中,hj为直方图,fv是指图像的累积归一化直方图,pv(i)是像素在强度级别[0:l]之间出现的概率,n=m×n是图像中的像素总数。
19、进一步地,所述估计照明模块,具体用于根据公式进行交通图像估计照明,其中,将最大值hjmax的每个通道视为一个动态参数,li(x,y)为照明图像,γ为照明图像中具有成本效益的伽马校正参数,为照明覆盖率。
20、进一步地,所述增强反射模块,具体用于根据公式分别进行增强反射,其中,拉普拉斯金字塔是通过高斯金字塔logp=log1-log2中模糊图像的两层之间的差异获得的,g(x,y)为通过高斯低通滤波器和隔行扫描子采样得到的不清晰图像,log1为第一个高斯金字塔层log1,log2为对第一层高斯金字塔层进行低通滤波和下采样得到的第二层高斯金字塔层,log2是log1的扩展图像,σ为高斯标准差。
21、进一步地,所述融合模块,具体用于根据公式进行图像融合,其中,iclear(x,y)为清晰图像,l(x,y)为进行估计照明后的交通图像,logp(x,y)为进进行增强反射后的交通图像,(x,y)是图像中的像素坐标。
22、本发明提供的一种交通图像增强处理方法及系统,通过预置自动白平衡策略对交通图像估计照明,并通过预置拉普拉斯金字塔算法将交通图像进行增强反射,实现了基于自动白平衡和拉普拉斯金字塔两个维度对交通图像进行增强融合,从而可以有效提高图像的对比度和色彩,使得图像更加清晰、鲜明;同时通过预置拉普拉斯金字塔算法将所述交通图像分解成多个尺度的图像,并将多个尺度的图像中不符合预设条件的图像,通过预置拉普拉斯金字塔算法中每层上的变换分别进行增强反射,还能够保留交通环境全局细节特征,不会造成图像的信息丢失,并且能够适应雾尘天气等恶劣天气条件的变化,具有更好的鲁棒性和实用性。
技术特征:
1.一种交通图像增强处理方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种交通图像增强处理方法,其特征在于,所述通过预置自动白平衡策略分别将采集的交通图像进行rgb通道扩展的步骤包括:根据公式和进行rgb通道扩展,其中,hj为直方图,fv是指图像的累积归一化直方图,pv(i)是像素在强度级别[0:l]之间出现的概率,n=m×n是图像中的像素总数。
3.根据权利要求1所述的一种交通图像增强处理方法,其特征在于,所述从通道扩展后的rgb色彩空间中遍历每个通道阈值内与灰色符合预置相似度的像素并进行交通图像估计照明的步骤包括:
4.根据权利要求1所述的一种交通图像增强处理方法,其特征在于,所述通过预置拉普拉斯金字塔算法将所述交通图像分解成多个尺度的图像,并将多个尺度的图像中不符合预设条件的图像,通过预置拉普拉斯金字塔算法中每层上的变换分别进行增强反射的步骤包括:
5.根据权利要求1所述的一种交通图像增强处理方法,其特征在于,所述将所述进行交通图像估计照明后的交通图像和所述进行边缘细节提取的交通图像进行图像融合的步骤包括:
6.一种交通图像增强处理系统,其特征在于,所述系统包括:
7.根据权利要求6所述的一种交通图像增强处理系统,其特征在于,
8.根据权利要求7所述的一种交通图像增强处理系统法,其特征在于,
9.根据权利要求6所述的一种交通图像增强处理系统,其特征在于,
10.根据权利要求6所述的一种交通图像增强处理系统,其特征在于,
技术总结
本发明公开一种交通图像增强处理方法及系统,涉及智能交通管理领域,包括如下步骤:通过求解路面有效区域和路口两两间的重合区域,可以有效减少冗余的车辆检测和坐标变换过程,同时充分利用车辆的特征信息和3D检测位置信息进行目标关联匹配,多维特征与3D位置相结合显著提升了车辆匹配的准确度;并且本发明引入了自适应性算法和智能权重分配策略,根据所述目标关联匹配结果对所述车辆匹配库进行自动更新,从而实现了可根据实际情况自动调整超参数,降低了对手动参数调整的依赖性,从而能够灵活适应不同的交通场景,而不需要频繁地手动调整参数,进而提高了本发明的普适性。
技术研发人员:闫军,张子昂,冯际彬,王伟
受保护的技术使用者:智慧互通科技股份有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!