基于信息优先级和关联空间属性的后融合跟踪方法及装置与流程
本发明涉及自动驾驶,尤其涉及的是基于信息优先级和关联空间属性的后融合跟踪方法及装置。
背景技术:
1、在自动驾驶等场景的感知任务中,单一传感器往往存在很多不足之处,因此通常会利用多个传感器的信息进行冗余和互补,以提升整个系统的鲁棒性。在技术方案上包括前融合、特征融合以及后融合等架构;其中,后融合的架构得益于良好的灵活性和可拓展性,目前已普遍应用于工程领域。
2、当前传感器后融合的方案尚存在以下问题:
3、1、在各传感器的输出抽象为目标级信息以后,因各传感器的信息无优先级或优先级划分不明确,导致可拓展性和可维护性差;
4、2、在关联多个传感器的信息时,通常未结合各个传感器的空间特性,导致关联准确率低,容易发生信息丢失,从而导致各传感器的信息利用率低;
5、3、在进行信息融合时,通常未结合各个传感器的性能特性来分别对速度和位置等信息进行适配处理,缺乏逻辑合理性。
6、因此,现有技术还有待改进。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术缺陷,本发明提供基于信息优先级和关联空间属性的后融合跟踪方法及装置,以解决现有的传感器后融合方案存在的关联准确率低以及可拓展性差的问题。
2、本发明解决技术问题所采用的技术方案如下:
3、第一方面,本发明提供基于信息优先级和关联空间属性的后融合跟踪方法,包括:
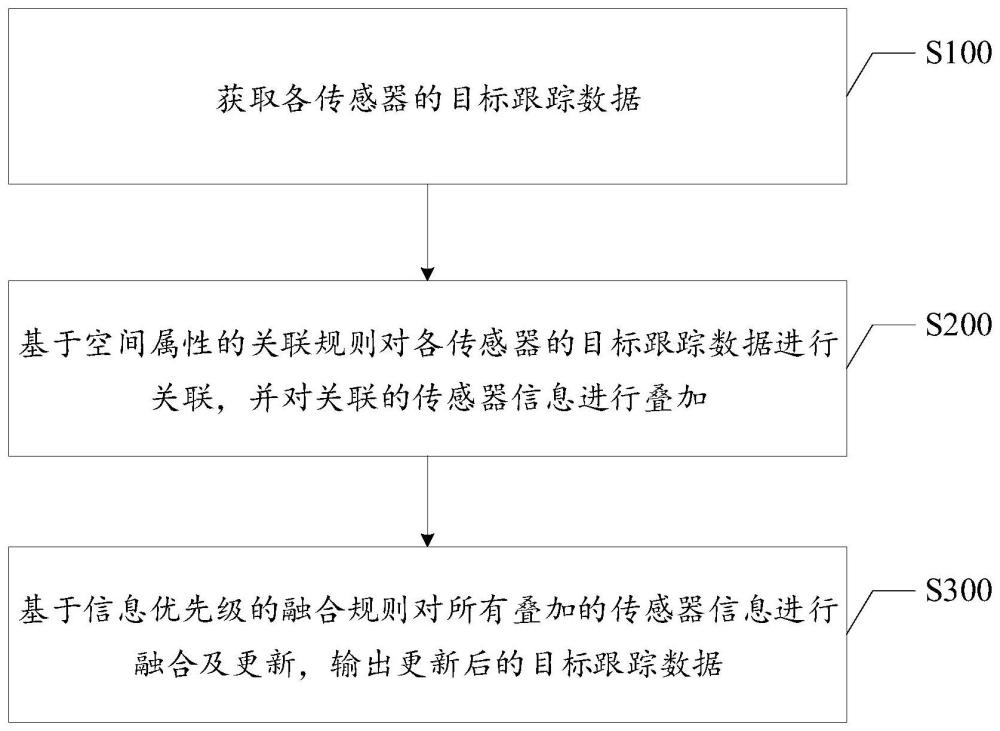
4、获取各传感器的目标跟踪数据;
5、基于空间属性的关联规则对各传感器的目标跟踪数据进行关联,并对关联的传感器信息进行叠加;
6、基于信息优先级的融合规则对所有叠加的传感器信息进行融合及更新,输出更新后的目标跟踪数据。
7、在一种实现方式中,所述获取各传感器的目标跟踪数据,之前包括:
8、根据各传感器的位置或准确度划定各传感器输入的信息优先级;
9、根据所述信息优先级调节对应的卡尔曼滤波的预测噪声值和观测噪声值,并确定所述信息优先级的融合规则。
10、在一种实现方式中,所述获取各传感器的目标跟踪数据,包括:
11、获取激光雷达的目标跟踪数据、毫米波雷达的目标跟踪数据以及相机的目标跟踪数据。
12、在一种实现方式中,所述基于空间属性的关联规则对各传感器的目标跟踪数据进行关联,并对关联的传感器信息进行叠加,包括:
13、将激光雷达与毫米波雷达的关联属性设为鸟瞰图空间,并将相机的关联属性设为二维图像空间;
14、基于设定的空间属性以及所述空间属性的关联规则对各传感器的目标跟踪数据进行关联,并对关联的传感器信息进行叠加。
15、在一种实现方式中,所述基于设定的空间属性以及所述空间属性的关联规则对各传感器的目标跟踪数据进行关联,并对关联的传感器信息进行叠加,包括:
16、将融合模块在t时刻的目标跟踪数据清零,并将t时刻的激光雷达的目标跟踪数据添加在所述融合模块;
17、将添加后的融合模块的目标跟踪数据与相机的目标跟踪数据进行空间关联,并将关联后的融合模块的目标跟踪数据与关联后的相机的目标跟踪数据进行叠加;
18、利用叠加后的目标跟踪数据替换关联后的融合模块的目标跟踪数据,得到新的融合模块的目标跟踪数据;
19、确定未关联的目标,并将相机中未关联的目标补充到新的融合模块的目标跟踪数据中,得到更新的第一融合跟踪数据。
20、在一种实现方式中,所述基于设定的空间属性以及所述空间属性的关联规则对各传感器的目标跟踪数据进行关联,并对关联的传感器信息进行叠加,还包括:
21、将更新的第一融合跟踪数据与毫米波雷达的目标跟踪数据进行空间关联,并将关联后的融合模块的目标跟踪数据与关联后的毫米波雷达的目标跟踪数据进行叠加;
22、利用叠加后的目标跟踪数据替换关联后的融合模块的目标跟踪数据,得到新的融合模块的目标跟踪数据;
23、确定未关联的目标,将毫米波雷达中未关联的目标补充到新的融合模块的目标跟踪数据中,得到更新的第二融合跟踪数据。
24、在一种实现方式中,所述基于信息优先级的融合规则对所有叠加的传感器信息进行融合及更新,包括:
25、基于历史轨迹预测t时刻的预测值,并将所述预测值与更新的第二融合跟踪数据进行关联;
26、将关联后的融合模块的目标跟踪数据与关联后的预测值进行基于信息优先级的信息融合;
27、确定未关联的目标,并将未关联的预测值与信息融合后的融合模块的目标跟踪数据添加到已存轨迹;
28、将未关联的融合模块的目标跟踪数据添加到创建的新轨迹信息。
29、第二方面,本发明提供一种基于信息优先级和关联空间属性的后融合跟踪装置,包括:
30、获取模块,用于获取各传感器的目标跟踪数据;
31、关联模块,用于基于空间属性的关联规则对各传感器的目标跟踪数据进行关联,并对关联的传感器信息进行叠加;
32、融合模块,用于基于信息优先级的融合规则对所有叠加的传感器信息进行融合及更新,输出更新后的目标跟踪数据。
33、第三方面,本发明提供一种终端,包括:处理器以及存储器,所述存储器存储有基于信息优先级和关联空间属性的后融合跟踪程序,所述基于信息优先级和关联空间属性的后融合跟踪程序被所述处理器执行时用于实现如第一方面所述的基于信息优先级和关联空间属性的后融合跟踪方法的操作。
34、第四方面,本发明还提供一种介质,所述介质为计算机可读存储介质,所述介质存储有基于信息优先级和关联空间属性的后融合跟踪程序,所述基于信息优先级和关联空间属性的后融合跟踪程序被处理器执行时用于实现如第一方面所述的基于信息优先级和关联空间属性的后融合跟踪方法的操作。
35、本发明采用上述技术方案具有以下效果:
36、本发明通过获取各传感器的目标跟踪数据,可基于空间属性的关联规则对各传感器的目标跟踪数据进行关联,并对关联的传感器信息进行叠加;以及,可基于信息优先级的融合规则对所有叠加的传感器信息进行融合及更新,输出更新后的目标跟踪数据。本发明在各传感器的输出抽象为目标级信息以后,根据传感器特性划定信息优先级,并设计信息融合规则,可拓展性和可维护性强,逻辑合理性强;以及,可通过划定的各传感器输出目标的关联空间属性、关联规则,有效提升关联准确率和各传感器的信息利用率。
技术特征:
1.一种基于信息优先级和关联空间属性的后融合跟踪方法,其特征在于,包括:
2.根据权利要求1所述的基于信息优先级和关联空间属性的后融合跟踪方法,其特征在于,所述获取各传感器的目标跟踪数据,之前包括:
3.根据权利要求1所述的基于信息优先级和关联空间属性的后融合跟踪方法,其特征在于,所述获取各传感器的目标跟踪数据,包括:
4.根据权利要求1所述的基于信息优先级和关联空间属性的后融合跟踪方法,其特征在于,所述基于空间属性的关联规则对各传感器的目标跟踪数据进行关联,并对关联的传感器信息进行叠加,包括:
5.根据权利要求4所述的基于信息优先级和关联空间属性的后融合跟踪方法,其特征在于,所述基于设定的空间属性以及所述空间属性的关联规则对各传感器的目标跟踪数据进行关联,并对关联的传感器信息进行叠加,包括:
6.根据权利要求4所述的基于信息优先级和关联空间属性的后融合跟踪方法,其特征在于,所述基于设定的空间属性以及所述空间属性的关联规则对各传感器的目标跟踪数据进行关联,并对关联的传感器信息进行叠加,还包括:
7.根据权利要求1所述的基于信息优先级和关联空间属性的后融合跟踪方法,其特征在于,所述基于信息优先级的融合规则对所有叠加的传感器信息进行融合及更新,包括:
8.一种基于信息优先级和关联空间属性的后融合跟踪装置,其特征在于,包括:
9.一种终端,其特征在于,包括:处理器以及存储器,所述存储器存储有基于信息优先级和关联空间属性的后融合跟踪程序,所述基于信息优先级和关联空间属性的后融合跟踪程序被所述处理器执行时用于实现如权利要求1-7中任意一项所述的基于信息优先级和关联空间属性的后融合跟踪方法的操作。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有基于信息优先级和关联空间属性的后融合跟踪程序,所述基于信息优先级和关联空间属性的后融合跟踪程序被处理器执行时用于实现如权利要求1-7中任意一项所述的基于信息优先级和关联空间属性的后融合跟踪方法的操作。
技术总结
本发明公开了基于信息优先级和关联空间属性的后融合跟踪方法及装置,包括:获取各传感器的目标跟踪数据;基于空间属性的关联规则对各传感器的目标跟踪数据进行关联,并对关联的传感器信息进行叠加;基于信息优先级的融合规则对所有叠加的传感器信息进行融合及更新,输出更新后的目标跟踪数据。本发明在各传感器的输出抽象为目标级信息以后,根据传感器特性划定信息优先级,并设计信息融合规则,可拓展性和可维护性强,逻辑合理性强;以及,可通过划定的各传感器输出目标的关联空间属性、关联规则,有效提升关联准确率和各传感器的信息利用率。
技术研发人员:梅圣明,许双杰,邹晓艺
受保护的技术使用者:深圳元戎启行科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!