一种基于自编码器的飞机零件缺陷检测方法与流程
本发明属于目标检测,具体涉及一种基于自编码器的飞机零件缺陷检测方法。
背景技术:
1、随着信息化与工业化的深度融合,在工业飞机零件缺陷检测的过程中如何使用信息化手段,使得检测方式更加自动化、智能化的研究日趋必要。在飞机制造领域常见的飞机零件有钣金件、锻铸件、特制件、标准件等,常见的缺陷类型有裂纹、汽包、结晶等。这些缺陷的及时识别不仅能有效规避粗加工过程中返工风险,而且还能更有利的保障主产品的质量,因此飞机零件缺陷检测十分必要。
2、近年来,深度学习在图像分类任务中取得了显著的进步,并快速应用于工业检测,尤其在缺陷检测方面取得较为优越的性能。如基于(cnn)卷积神经网络的vggnet和yolo神经网络模型在大型训练集上的准确率可以达到85%,基本上可以满足一些工业场景的使用需求。近年来随着基于attention机制transformer模型的提出,缺陷检测的准确率更是可以稳定在90%以上。
3、然而,这些深度学习方法通常需要大量人为标注的数据,才能训练出性能比较稳定、准确率比较高的模型。但是,很多情况下,人为标注数据成本比较高,常常难以得到大量经过标注的训练样本,这极大的限制了深度学习方法的泛化能力和鲁棒性。为此本申请为解决在传统深度学习方法中使用大量未人为标注数据的情况下,提出一种基于自编码器的飞机零件缺陷检测方法。
技术实现思路
1、发明目的
2、本发明的目的在于针对深度学习算法训练过程受制于大量人工标注数据问题,提出一种基于自编码器飞机零件检测方法。本方法可基于大量带标签的数据,无需再人为手工标注即可开始训练模型,训练出来的模型在鲁棒性和准确率上均有比较好的表现。
3、技术方案
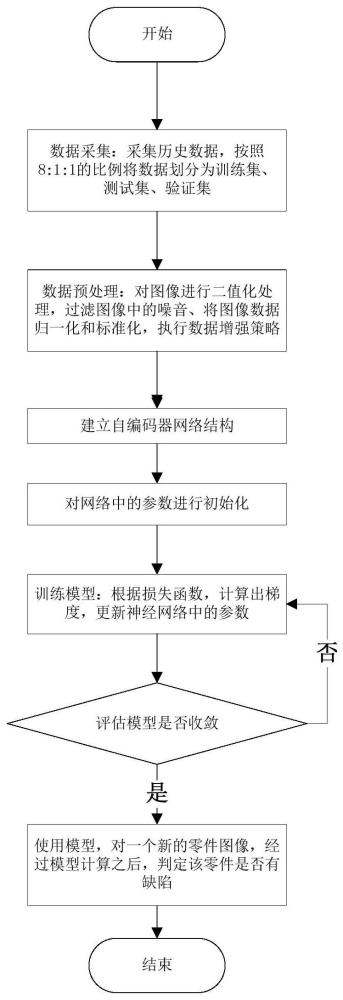
4、本发明提出了一种基于自编码器飞机零件缺陷检测方法,具体步骤如下:
5、步骤一:数据采集。采集飞机零件样品的历史数据,在电子显微镜的pc端存储着大量的飞机零件表面图像数据的正常样本和少量异常样本,收集这些图像数据,作为训练模型时的输入数据;
6、步骤二:数据预处理
7、1)二值化处理图像:选定阈值在[0,255]之间,对图像进行二值化处理。
8、2)过滤图像噪音:使用均值滤波器,设定滤波器的窗口大小为3x3,在二值化后的图像上进行滑动,最后形成去噪二值图像。
9、3)归一化和标准化:将去噪二值图像进行归一化和标准化处理。
10、4)数据增强:采用有监督的数据增强策略,在已有的数据基础上进行数据扩展;通过对图像的一些几何变化,如缩放、变形、剪裁、移位、旋转、翻转等,改变图像的数据表现形式,但是并不改变数据标签。
11、步骤三:建立自编码器神经网络结构,主要由编码器和解码器构成。自编码器是一种无监督的神经网络结构模型,主要用它来学习到输入数据的隐含特征,这个工作让编码器来完成。然后将隐含的特征再还原成原始数据,这个工作让解码器来完成。
12、(1)建立编码器:将输入的数据记为x,将输入的数据x通过函数转换成数据y,用公式表达为:y=h(x)
13、(2)建立解码器:将编码器的输出数据y作为解码器的输入数据,通过函数得到重构后的数据r,用公式表达为:
14、r=f(y)=f(h(x))
15、(3)定义误差e为原始数据x和重构后的数据r之间的差异,用公式表达为:
16、网络训练的目的是减少均方误差,即最大化的降低损失函数的值。
17、步骤四:参数初始化。使用有限制的随机初始化参数策略,具体如下:记前一层的神经元个数为n,下一层的神经元个数为m。本层使用随机化权重矩阵w来表达,取值范围为[-a,a]。其中
18、
19、步骤五:训练模型
20、将经过步骤二预处理过的训练集正常样本拉伸为一个一维的向量x,先输入给编码器,经过编码器将输入数据压缩成一个向量h,最后经过解码器运算后,将数据还原成一个向量r。计算r和x之间差异,去更新梯度。
21、步骤六:评估模型
22、将一个正常样本的数据拉升为一个向量x1,将一个异常样本拉升为向量x2。经过自编码器的模型后,两个向量分别被映射为计算损失函数的值,到阈值范围内算法收敛,否则回到步骤五种继续训练模型。
23、进一步的,还包括步骤七:使用模型
24、使用训练好的神经网络对新的飞机零件样本进行检测,输出最终的检测结果,判定飞机零件是否有缺陷。
25、进一步的,在实施步骤一的过程中,考虑到实际业务场景,人工进行数据标注成本过高,所以采用的是一种无监督学习的算法框架,侧重于采集正常样本,正常样本与异常样本的数据量比例为20∶1较为恰当。然后再将正常样本和异常样本按照8∶1∶1的比例划分为训练集、测试集、验证集。
26、进一步的,在实施步骤二的过程中,对图像数据进行二值化处理的目的在于,提升后续的算法执行速度,便于算法可以快速收敛。对于一些算力充足的企业,可以忽略此步骤。
27、进一步的,在实施步骤二的过程中,执行数据增强策略,主要是为了获取更多的数据,让算法在最后收敛的时候达到比较好的状态。
28、进一步的,在步骤三中编码器具体为encoder。
29、进一步的,在步骤三解码器具体为decoder。
30、进一步的,在实施步骤四的过程中,之所以用前一层的神经元个数和本层的神经元个数来限制本层参数的初始化,主要是为了在训练神经网络的过程中,保持输入信号和梯度的方差在不同层大致相等,避免在深层网络中产生梯度消失或梯度爆炸的问题。
31、本申请的有益效果在于:
32、该方法以无监督学习的方式,使用正常样本的飞机零件图片数据,训练出具有高精度与高鲁棒性的自编码器。在训练过程中,编码器主要用来压缩信息,学习到数据中的隐含信息;解码器主要用来解压信息,将隐含信息还原成原始信息。使用该方法不仅解决了传统飞机零件检测人工目测效率低的问题;而且原始数据无需再进行人为标注,规避了使用深度学习手段进行异常检测时人为标注数据成本高的弊端。训练出来的自编码器在准确性与鲁棒性均有比较好的表现。
技术特征:
1.一种基于自编码器飞机零件缺陷检测方法,其特征在于,具体步骤如下:
2.根据权利要求1所述的方法,其特征在于,还包括步骤七:使用模型,使用训练好的神经网络对新的飞机零件样本进行检测,输出最终的检测结果,判定飞机零件是否有缺陷。
3.根据权利要求2所述的方法,其特征在于,在实施步骤一的过程中,考虑到实际业务场景,人工进行数据标注成本过高,所以采用的是一种无监督学习的算法框架,侧重于采集正常样本,正常样本与异常样本的数据量比例为20:1;然后再将正常样本和异常样本按照8:1:1的比例划分为训练集、测试集、验证集。
4.根据权利要求3所述的方法,其特征在于,在实施步骤二的过程中,对图像数据进行二值化处理的目的在于,提升后续的算法执行速度,便于算法可以快速收敛。
5.根据权利要求4所述的方法,其特征在于,在实施步骤二的过程中,执行数据增强策略,是为了获取更多的数据,让算法在最后收敛的时候达到比较好的状态。
6.根据权利要求5所述的方法,其特征在于,在步骤三中编码器具体为encoder。
7.根据权利要求6所述的方法,其特征在于,在步骤三解码器具体为decoder。
8.根据权利要求7所述的方法,其特征在于,在实施步骤四的过程中,用前一层的神经元个数和本层的神经元个数来限制本层参数的初始化,是为了在训练神经网络的过程中,保持输入信号和梯度的方差在不同层大致相等,避免在深层网络中产生梯度消失或梯度爆炸的问题。
技术总结
本发明属于目标检测技术领域,具体涉及一种基于自编码器的飞机零件缺陷检测方法。本方法可基于大量带标签的数据,无需再人为手工标注即可开始训练模型,训练出来的模型在鲁棒性和准确率上均有比较好的表现。使用该方法不仅解决了传统飞机零件检测人工目测效率低的问题;而且原始数据无需再进行人为标注,规避了使用深度学习手段进行异常检测时人为标注数据成本高的弊端。训练出来的自编码器在准确性与鲁棒性均有比较好的表现。
技术研发人员:刘阳,徐晓伟
受保护的技术使用者:陕西飞机工业有限责任公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!