一种基于改进YOLOv5s的高精度太阳能电池板缺陷检测方法
本发明涉及数字图像处理领域,具体涉及一种基于改进yolov5s的高精度太阳能电池板缺陷检测方法。
背景技术:
1、由于太阳能电池片制作工艺复杂,在制作流程过程中极易出现划痕、叉隐、黑点、无电等缺陷,这些缺陷的存在极大降低了太阳能电池板转换效率,还会缩短太阳能电池板的寿命。因此出厂前对太阳能电池板表面的缺陷进行检测尤为重要。
2、目前,基于深度学习的目标检测算法包括两种,一种是两阶段目标检测算法,对于两阶段目标检测算法首先通过算法来生成一些样本候选框,之后在通过卷积神经网络进行样本分类。常见的两阶段目标检测的算法有r-cnn、faster-r-cnn等等。另一种是一阶段目标检测算法,此算法直接将目标定位的问题转化成回归问题,与两阶段目标检测的区别在于,不需要候选框,比较常见的一阶段目标检测算法有yolo系列、ssd等。现在的网络虽然可以运用在太阳能电池板缺陷检测,但其精确度还有很大的提升空间。
技术实现思路
1、本发明的目的是开发一种基于改进yolov5s的高精度太阳能电池板缺陷检测方法,通过对yolov5s模型的改进,提高太阳能电池板缺陷的检测精度。
2、本发明的上述技术目的是通过以下技术方案得以实现的:
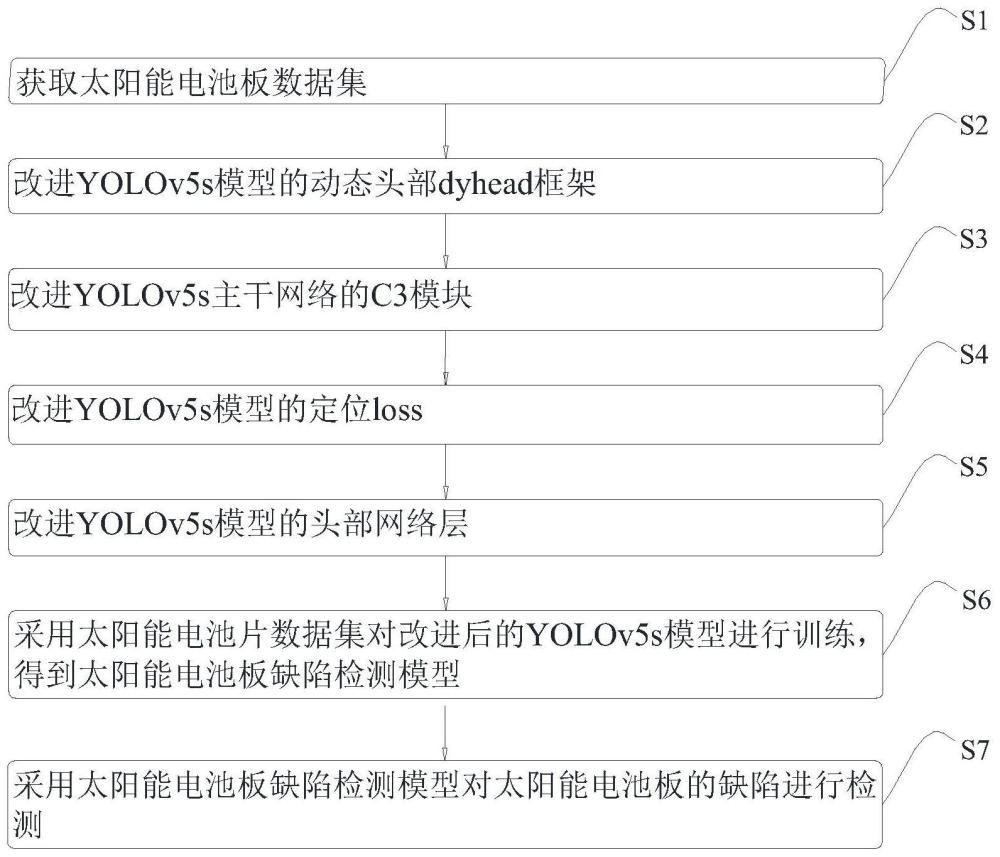
3、本发明提供的一种基于改进yolov5s的高精度太阳能电池板缺陷检测方法,包括如下步骤:
4、获取太阳能电池板数据集;
5、改进yolov5s模型的动态头部dyhead框架;
6、改进yolov5s主干网络的c3模块;
7、改进yolov5s模型的定位loss;
8、改进yolov5s模型的头部网络层;
9、采用太阳能电池片数据集对改进后的yolov5s模型进行训练,得到太阳能电池板缺陷检测模型;
10、采用太阳能电池板缺陷检测模型对太阳能电池板的缺陷进行检测。
11、进一步的,获取太阳能电池板数据集,包括获取太阳能电池板图像,对太阳能电池板图像进行增强、缺陷标注。
12、进一步的,改进yolov5s模型的动态头部dyhead框架,包括采用dconv替换所述动态头部dyhead框架的conv。
13、进一步的,改进yolov5s模型的动态头部dyhead框架,包括:将yolov5s模型头部的conv、c3模块和concat模块全部替换成动态头部dyhead框架的conv;
14、将动态头部dyhead框架的conv替换为dconv。
15、进一步的,改进yolov5s主干网络的c3模块,包括将感受野增强模块rfi加入到c3模块中。
16、进一步的,将感受野增强模块rfi代替yolov5s中c3模块的瓶颈。
17、进一步的,感受野增强模块rfi包括基于扩展卷积的多分支和采集加权层。
18、进一步的,改进yolov5s模型的定位loss,包括在所述定位loss中添加高斯沃瑟斯坦距离,进行一定比例的融合,比例范围是0~1。
19、本发明中,yolov5s定位loss的iou与归一化沃瑟斯坦距离各取一半,既0.5+0.5(yolov5s的iou损失函数取值范围在0-1之间)。具体来说就是通过修改iou_ratio来修改两者的比例(增大iou_ratio就增加yolov5s iou损失函数的比重,减小iou_ratio就增加高斯沃瑟斯坦距离损失函数的比重),然后通过相加得到模型最终的ibox。
20、进一步的,yolov5s模型的头部网络层,包括在所述头部网络层添加se自适应注意力模块。
21、进一步的,se自适应注意力模块的构建方法如下:将每个学习到的过滤器都与接受域一起操作,并使用全局平均池来生成通道统计信息,计算公式如下:选择s型激活门控机制对自适应进行再校正,计算公式如下:s=fex(z,w)=σ(w2δ(w1z));其中,δ为激活函数relu;w1、w2分别用于降维和升维的两个全连接层权重。
22、综上所述,本发明具有以下有益效果:
23、1、通过自制的数据集,使得实验所需要的太阳能电池片表面缺陷数据更能满足实验环境,有利于检测精确的提升;
24、2、改进动态头部dyhead框架,将动态头框架的conv替换为动态卷积dconv,在不增加模型深度和宽度的情况下,增加模型的复杂性,改进后的动态头部相比于yolov5s原模型precision、recall、map分别提高了7.3%、8.7%、4.7%;
25、3、改进yolov5s主干网络的c3模块,加入改进后的感受野增强模块rfi,完成感受野的增强,相比于yolov5s原模型precision、recall、map分别提高了8.1%、6.3%、4.6%;
26、4、改进yolov5s定位loss,在yolov5s的定位loss中添加高斯沃瑟斯坦距离,进行一定比例的融合,增强检测模型对小目标缺陷的位置偏差,相比于yolov5s原模型precision、recall、map分别提高了7.8%、8.0%、4.7%;
27、5、改进yolov5s的头部,添加se自适应注意力模块,增强检测模型的分类和定位精度,相比于yolov5s原模型precision、recall、map分别提高了2.9%、7.3%、2.2%。
技术特征:
1.一种基于改进yolov5s的高精度太阳能电池板缺陷检测方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于改进yolov5s的高精度太阳能电池板缺陷检测方法,其特征在于,所述获取太阳能电池板数据集,包括获取太阳能电池板图像,对所述太阳能电池板图像进行增强、缺陷标注。
3.根据权利要求1所述的一种基于改进yolov5s的高精度太阳能电池板缺陷检测方法,其特征在于,所述改进yolov5s模型的动态头部dyhead框架,包括采用dconv替换所述动态头部dyhead框架中的conv。
4.根据权利要求3所述的一种基于改进yolov5s的高精度太阳能电池板缺陷检测方法,其特征在于,所述改进yolov5s模型的动态头部dyhead框架,包括:将yolov5s模型头部的conv、c3模块和concat模块全部替换成动态头部dyhead框架的conv;
5.根据权利要求1所述的一种基于改进yolov5s的高精度太阳能电池板缺陷检测方法,其特征在于,所述改进yolov5s主干网络的c3模块,包括将感受野增强模块rfi加入到c3模块中。
6.根据权利要求5所述的一种基于改进yolov5s的高精度太阳能电池板缺陷检测方法,其特征在于,所述改进yolov5s主干网络的c3模块,是将所述感受野增强模块rfi代替yolov5s中c3模块的瓶颈。
7.根据权利要求5或6所述的一种基于改进yolov5s的高精度太阳能电池板缺陷检测方法,其特征在于,所述感受野增强模块rfi包括基于扩展卷积的多分支和采集加权层。
8.根据权利要求1所述的一种基于改进yolov5s的高精度太阳能电池板缺陷检测方法,其特征在于,所述改进yolov5s模型的定位loss,包括在所述定位loss中添加高斯沃瑟斯坦距离,并进行一定比例的融合,所述比例范围是0~1。
9.根据权利要求4所述的一种基于改进yolov5s的高精度太阳能电池板缺陷检测方法,其特征在于,改进yolov5s模型的头部网络层,包括在所述头部网络层添加se自适应注意力模块。
10.根据权利要求9所述的一种基于改进yolov5s的高精度太阳能电池板缺陷检测方法,其特征在于,所述se自适应注意力模块的构建方法如下:将每个学习到的过滤器都与接受域一起操作,并使用全局平均池来生成通道统计信息,计算公式如下:其中,zc为统计量z的第c个元素,fsq为全局空间信息转换公式,uc为转换输出u在第c个单元的转换输出,h;w分别高空间维度;宽空间维度,i;j分别为高空间维度;宽空间维度的变量;选择s型激活门控机制对自适应进行再校正,计算公式如下:s=fex(z,w)=σ(w2δ(w1z));其中,δ为激活函数relu;w1、w2分别用于降维和升维的两个全连接层权重。
技术总结
本发明涉及电抗器减振降噪设计领域,具体涉及一种基于改进YOLOv5s的高精度太阳能电池板缺陷检测方法,包括如下步骤:获取太阳能电池板数据集;改进YOLOv5s模型的动态头部dyhead框架;改进YOLOv5s主干网络的C3模块;改进YOLOv5s模型的定位loss;改进YOLOv5s模型的头部网络层;采用太阳能电池片数据集对改进后的YOLOv5s模型进行训练,得到太阳能电池板缺陷检测模型;采用太阳能电池板缺陷检测模型对太阳能电池板的缺陷进行检测。本发明提供的检测方法可以显著提升太阳能电池板表面缺陷检测的准确度和实时性。
技术研发人员:朱栋,胡伟笑
受保护的技术使用者:常州大学
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!