基于巡检的图像识别方法、装置、设备及存储介质与流程
本申请涉及人工智能,尤其涉及一种基于巡检的图像识别方法、装置、设备及存储介质。
背景技术:
1、目前,使用机器人辅助进行巡检的方式通常是由工作人员设定机器人的巡检任务,例如,设置机器人的巡检时间和路径,设定对巡检对象的拍摄地点和设定机器上传图片的方式。再由工作人员对机器人上传的图片逐张进行检查,以此判断巡检对象是否存在故障或者异常情况,若工作人员没有实时对图片进行检查,则无法满足巡检的实时性,导致巡检效率低下。
2、因此,提供一种满足巡检实时性的自动识别方案以提高巡检效率,已成为本领域技术人员亟待解决的技术问题。
技术实现思路
1、鉴于以上内容,本申请提供一种基于巡检的图像识别方法、装置、设备及存储介质,其目的在于解决上述技术问题。
2、第一方面,本申请提供一种基于巡检的图像识别方法,所述方法包括:
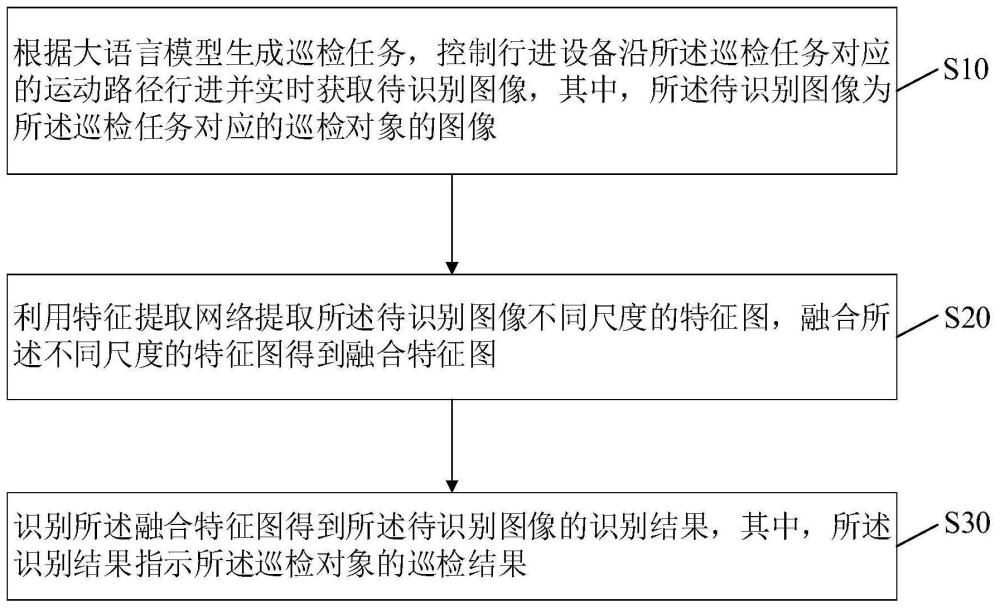
3、根据大语言模型生成巡检任务,控制行进设备沿所述巡检任务对应的运动路径行进并实时获取待识别图像,其中,所述待识别图像为所述巡检任务对应的巡检对象的图像;
4、利用特征提取网络提取所述待识别图像不同尺度的特征图,融合所述不同尺度的特征图得到融合特征图;
5、识别所述融合特征图得到所述待识别图像的识别结果,其中,所述识别结果指示所述巡检对象的巡检结果。
6、第二方面,本申请提供一种基于巡检的图像识别装置,所述装置包括:
7、控制模块:用于根据大语言模型生成巡检任务,控制行进设备沿所述巡检任务对应的运动路径行进并实时获取待识别图像;
8、融合模块:用于利用特征提取网络提取所述待识别图像不同尺度的特征图,融合所述不同尺度的特征图得到融合特征图;
9、识别模块:用于识别所述融合特征图得到所述待识别图像的识别结果,其中,所述识别结果指示所述巡检对象的巡检结果。
10、第三方面,本申请提供一种行进设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
11、存储器,用于存放计算机程序;
12、处理器,用于执行存储器上所存放的程序时,实现第一方面任一项实施例所述的基于巡检的图像识别方法。
13、第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面任一项实施例所述的基于巡检的图像识别方法。
14、本申请实施例提供的上述技术方案与现有技术相比具有如下优点:
15、本申请通过大语言模型生成巡检任务,控制行进设备沿巡检任务对应的运动路径行进并实时获取待识别图像,待识别图像为巡检任务对应的巡检对象的图像,利用特征提取网络提取待识别图像不同尺度的特征图,融合不同尺度的特征图得到融合特征图,识别融合特征图得到待识别图像的识别结果,识别结果表示巡检对象的巡检结果,由于融合特征融合了不同尺度的特征图,因此融合特征图可以更准确地表征待识别图像的特征,从而提高待识别图像的识别精度。由于在提取不同尺度的特征图和融合不同尺度的特征图时所需的参数和计算量较低,因此可以提高识别待识别图像的速度,从而满足对巡检对象进行实时巡检的需求,并自动地完成巡检任务,提高巡检效率。
技术特征:
1.一种基于巡检的图像识别方法,其特征在于,所述方法包括:
2.如权利要求1所述的基于巡检的图像识别方法,其特征在于,所述根据大语言模型生成巡检任务,控制所述行进设备沿所述巡检任务对应的运动路径行进并实时获取待识别图像,包括:
3.如权利要求1所述的基于巡检的图像识别方法,其特征在于,所述利用特征提取网络提取所述待识别图像不同尺度的特征图,融合所述不同尺度的特征图得到融合特征图,包括:
4.如权利要求3所述的基于巡检的图像识别方法,其特征在于,所述利用特征提取网络的多级特征融合单元对降低通道数的初始特征图进行特征提取操作,得到多个尺度的特征图,包括:
5.如权利要求4所述的基于巡检的图像识别方法,其特征在于,所述利用多级特征融合单元中的cbs模块和卷积核,对所述第一处理结果进行处理得到多个尺度的特征图,包括:
6.如权利要求5所述的基于巡检的图像识别方法,其特征在于,所述利用多级特征融合单元中的cbs模块和卷积核,对所述第四处理结果进行处理得到多个尺度的特征图,包括:
7.如权利要求1至6中任意一项所述的基于巡检的图像识别方法,其特征在于,在识别所述融合特征图得到所述待识别图像的识别结果之后,所述方法还包括:
8.一种基于巡检的图像识别装置,其特征在于,所述装置包括:
9.一种行进设备,其特征在于,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述的基于巡检的图像识别方法。
技术总结
本申请涉及一种基于巡检的图像识别方法、装置、设备及存储介质,所述方法包括:根据大语言模型生成巡检任务,控制行进设备沿巡检任务对应的运动路径行进并实时获取待识别图像,待识别图像为巡检任务对应的巡检对象的图像,利用特征提取网络提取待识别图像不同尺度的特征图,融合不同尺度的特征图得到融合特征图,识别融合特征图得到待识别图像的识别结果,识别结果表示巡检对象的巡检结果。本申请可以实现对巡检对象进行实时巡检的需求,并自动地完成巡检任务,提高巡检效率。
技术研发人员:肖雪,高莎,黄麟,傅豪杰
受保护的技术使用者:国器智眸(重庆)科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!