室内场景生成方法、控制装置及可读存储介质与流程
本发明涉及场景构建,具体提供一种室内场景生成方法、控制装置及可读存储介质。
背景技术:
1、在进行机器人室内3d仿真场景的视觉检测、视觉导航、具身智能等行为任务测试时,以及基于深度学习等感知或决策规划任务等模型训练过程中,都需要丰富的室内场景数据作为数据支持。在真实的室内场景数据有限的前提下,往往需要生成虚拟的室内场景数据。
2、在虚拟室内场景数据构建过程中,传统的方法一般是采用人工手动搭建场景及人工摆放场景物件,这个过程往往是效率较低的。
3、相应地,本领域需要一种新的室内场景生成方案来解决上述问题。
技术实现思路
1、为了克服上述缺陷,提出了本发明,以提供解决或至少部分地解决如何更为高效地生成虚拟室内场景数据的问题。
2、在第一方面,本发明提供一种室内场景生成方法,所述方法包括:
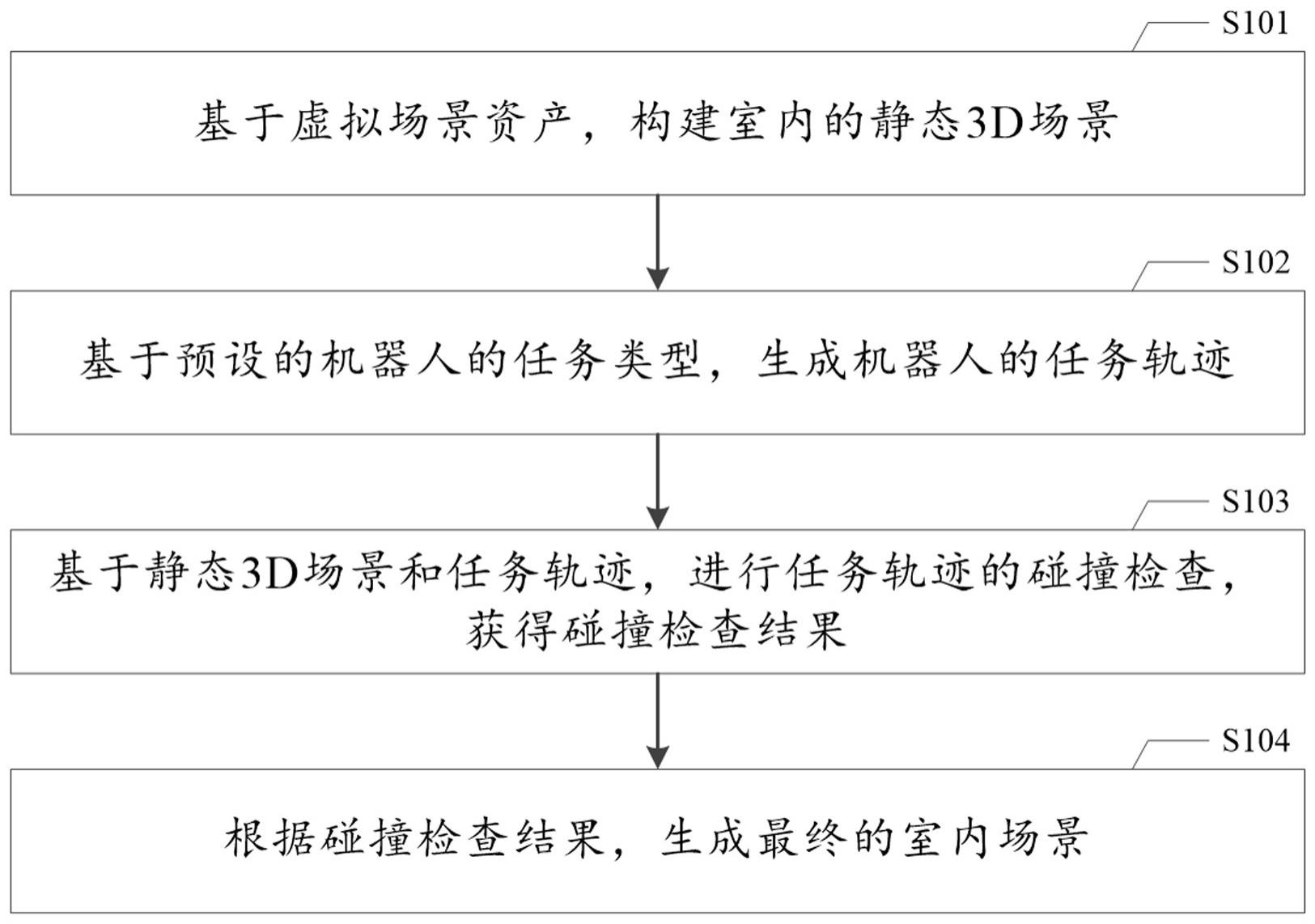
3、基于虚拟场景资产,构建室内的静态3d场景;
4、基于预设的机器人的任务类型,生成所述机器人的任务轨迹;
5、基于所述静态3d场景和所述任务轨迹,进行所述任务轨迹的碰撞检查,获得碰撞检查结果;
6、根据所述碰撞检查结果,生成最终的室内场景。
7、在上述室内场景生成方法的一个技术方案中,所述虚拟场景资产包括环境布局资产、大型虚拟场景资产、小型虚拟场景资产和装饰型虚拟场景资产;
8、所述基于虚拟场景资产,构建室内的静态3d场景,包括:
9、生成所述环境布局资产;
10、基于所述环境布局资产,进行所述大型虚拟场景资产的随机摆放;
11、基于摆放后的大型虚拟场景资产和所述环境布局资产,根据所述小型虚拟场景资产的交互功能属性,进行小型虚拟场景资产的随机摆放;
12、基于摆放后的小型虚拟场景资产、摆放后的大型虚拟场景资产和所述环境布局资产,进行装饰型虚拟场景资产的随机摆放,以构建所述静态3d场景。
13、在上述室内场景生成方法的一个技术方案中,所述基于所述环境布局资产,进行所述大型虚拟场景资产的随机摆放,包括:
14、基于所述环境布局资产与所述大型虚拟场景资产遵循临近或相对或远离的相对关系,进行所述大型虚拟场景资产的随机摆放。
15、在上述室内场景生成方法的一个技术方案中,所述环境布局资产、所述大型虚拟场景资产、所述小型虚拟场景资产和所述装饰型虚拟场景资产之间遵循无干涉原则。
16、在上述室内场景生成方法的一个技术方案中,所述基于预设的机器人的任务类型,生产所述机器人的任务轨迹,包括:
17、根据所述任务类型、预设的起点和预设的终点,随机生成所述机器人的途径点,并获取部分途径点上所述机器人的3d位姿;
18、根据所述起点、所述终点,所述途径点和所述3d位姿,获取所述任务轨迹。
19、在上述室内场景生成方法的一个技术方案中,所述根据所述碰撞检查结果,生成最终的室内场景,包括:
20、当所述碰撞检查结果为所述虚拟场景资产与所述机器人存在碰撞时,将所述存在碰撞的虚拟场景资产移除,以根据移除后的静态3d场景,获得所述最终的室内场景。
21、在上述室内场景生成方法的一个技术方案中,
22、所述根据移除后的静态3d场景,获得所述最终的室内场景,包括:
23、在所述移除后的静态3d场景中,重新进行虚拟场景资产的生成,以获得更新后的静态3d场景;并执行“基于所述静态3d场景和所述任务轨迹,进行所述任务轨迹的碰撞检查,获得碰撞检查结果”的步骤,以根据所述检查结果,生成最终的室内场景。
24、在上述室内场景生成方法的一个技术方案中,所述生成最终的室内场景,包括:
25、根据所述虚拟场景资产的资产标签,应用物理仿真引擎,生成所述虚拟场景资产的rgb图像和/或深度图和/或语义信息和/或2d标注框和/或3d标注盒和/或位姿数据。
26、在第二方面,提供一种控制装置,该控制装置包括至少一个处理器和至少一个存储装置,所述存储装置适于存储多条程序代码,所述程序代码适于由所述处理器加载并运行以执行上述室内场景生成方法的技术方案中任一项技术方案所述的室内场景生成方法。
27、在第三方面,提供一种计算机可读存储介质,该计算机可读存储介质其中存储有多条程序代码,所述程序代码适于由处理器加载并运行以执行上述室内场景生成方法的技术方案中任一项技术方案所述的室内场景生成方法。
28、本发明上述一个或多个技术方案,至少具有如下一种或多种有益效果:
29、在实施本发明的技术方案中,本发明根据虚拟场景资产来构建室内的镜头3d场景,基于机器人的任务类型,生成机器人的任务轨迹,根据静态3d场景和任务轨迹,进行任务轨迹的碰撞检查,获得碰撞检查结果,根据碰撞检查结果生成最终的室内场景。通过上述配置方式,本发明能够实现自动化的室内场景生成,无需人工操作,有效提升了室内场景的生成效率和场景多样性。同时,结合机器人任务轨迹的碰撞检查,也能够有效确保生成的室内场景的有效性,进而能够为视觉检测、视觉导航、具身智能等行为任务提供更为丰富的任务测试数据,也能够为基于深度学习的感知和决策任务的模型训练提供更为丰富的训练数据。
技术特征:
1.一种室内场景生成方法,其特征在于,所述方法包括:
2.根据权利要求1所述的室内场景生成方法,其特征在于,
3.根据权利要求2所述的室内场景生成方法,其特征在于,
4.根据权利要求2或3所述的室内场景生成方法,其特征在于,
5.根据权利要求1所述的室内场景生成方法,其特征在于,
6.根据权利要求1所述的室内场景生成方法,其特征在于,
7.根据权利要求6所述的室内场景生成方法,其特征在于,
8.根据权利要求1所述的室内场景生成方法,其特征在于,
9.一种控制装置,包括至少一个处理器和至少一个存储装置,所述存储装置适于存储多条程序代码,其特征在于,所述程序代码适于由所述处理器加载并运行以执行权利要求1至8中任一项所述的室内场景生成方法。
10.一种计算机可读存储介质,其中存储有多条程序代码,其特征在于,所述程序代码适于由处理器加载并运行以执行权利要求1至8中任一项所述的室内场景生成方法。
技术总结
本发明涉及场景构建技术领域,具体提供一种室内场景生成方法、控制装置及可读存储介质,旨在解决如何更为高效地生成虚拟室内场景数据的问题。为此目的,本发明根据虚拟场景资产来构建室内的镜头3D场景,基于机器人的任务类型,生成机器人的任务轨迹,根据静态3D场景和任务轨迹,进行任务轨迹的碰撞检查,获得碰撞检查结果,根据碰撞检查结果生成最终的室内场景,能够实现自动化的室内场景生成,提升了室内场景的生成效率和场景多样性。结合机器人任务轨迹的碰撞检查,能够确保生成的室内场景的有效性,为视觉检测、视觉导航、具身智能等行为任务提供丰富的任务测试数据,也能为基于深度学习的感知和决策任务的模型训练提供丰富的训练数据。
技术研发人员:罗茜,谢晨,杨海波
受保护的技术使用者:光轮智能(北京)科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!