一种隧道行车安全改进措施制定方法、系统及设备与流程
本发明涉及隧道出入口段改进领域,特别是涉及一种隧道行车安全改进措施制定方法、系统及设备。
背景技术:
1、在隧道的出入口段,驾驶者常常面临特殊的行驶环境,这包括“黑洞”和“白洞”效应。在进入隧道时,由于突然从明亮的日光环境进入较暗的隧道内部,驾驶者可能会遇到所谓的“黑洞”效应,导致瞬间的视觉障碍。而在驶出隧道时,从较暗的隧道内部回到明亮的日光环境,可能产生所谓的“白洞”效应,同样会给驾驶者带来短暂的视觉障碍。
2、在这种特殊的行驶环境下,来自洞口的直射或者反射自然光线穿过车辆挡风玻璃后投射在驾驶者的眼球中,会产生眩光效应,从而在驾驶者视网膜前方形成一层白色光幕,眩光效应越大,白色光幕的亮度越大,越对行车安全不利,反之亦然。白色光幕的存在,对行车安全造成了威胁,降低了驾驶者的视觉能力,从而降低了驾驶者对隧道内外环境、车辆及路面上障碍物的可见度,造成驾驶者视觉不适,影响了行车安全。
3、基于隧道出入口段特殊的行驶环境,日光对驾驶者在隧道出入口段的视觉能力产生的影响,继而对行车安全性的影响,因此,制定具有针对性的优化措施,提升隧道洞内外行车的安全性至关重要。
技术实现思路
1、本发明的目的是提供一种隧道行车安全改进措施制定方法、系统及设备,能够基于隧道出入口段特殊的行驶环境制定出优化的隧道改进措施,降低驾驶者的视觉不适,提高行车安全。
2、为实现上述目的,本发明提供了如下方案:
3、一种隧道行车安全改进措施制定方法,包括:
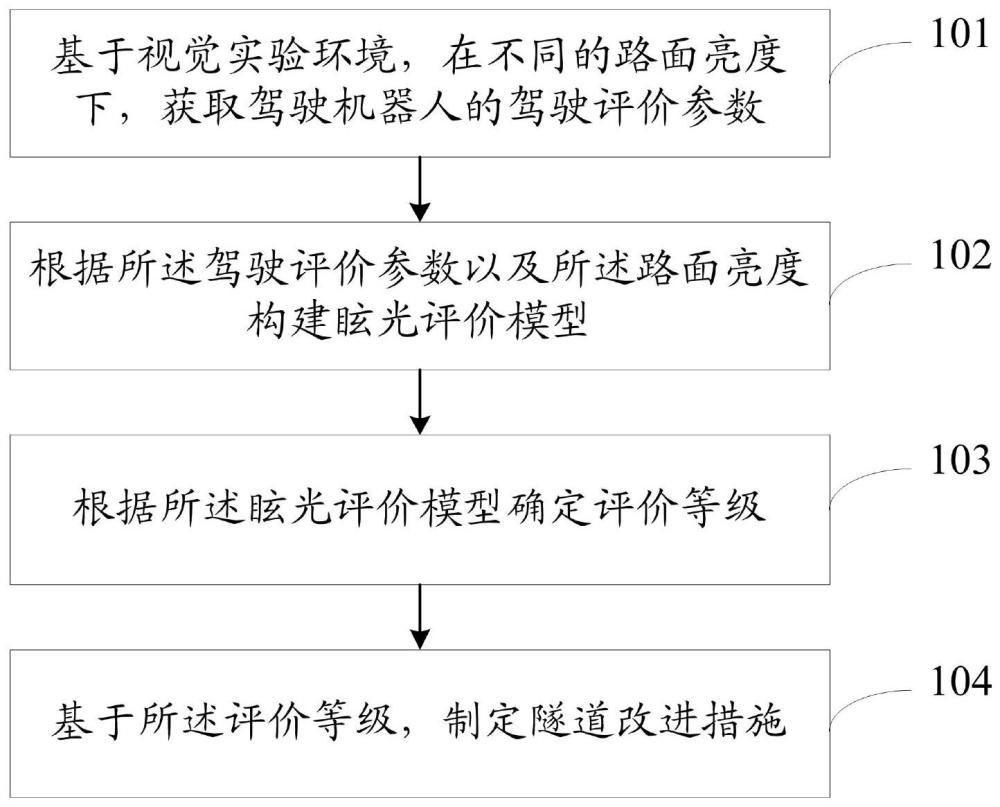
4、基于视觉实验环境,在不同的路面亮度下,获取驾驶机器人的驾驶评价参数;所述视觉实验环境用于模拟在隧道出入口段行驶时的虚拟驾驶场景;所述驾驶评价参数包括舒适度评价值以及目标物清晰度评价值;
5、根据所述驾驶评价参数以及所述路面亮度构建眩光评价模型;
6、根据所述眩光评价模型确定评价等级;
7、基于所述评价等级,制定隧道改进措施。
8、可选的,获取驾驶机器人的驾驶评价参数,具体包括:
9、根据光源亮度以及驾驶机器人眩目感制定舒适度评价表;
10、基于所述舒适度评价表,确定每个驾驶机器人的舒适度评价值。
11、可选的,获取驾驶机器人的驾驶评价参数,具体包括:
12、根据驾驶机器人所看到的目标物轮廓清晰度以及目标细节清晰度制定目标物清晰度评价表;
13、基于所述目标物清晰度评价表,确定每个驾驶机器人的清晰度评价值。
14、可选的,所述眩光评价模型为:
15、evaluation_grad=α×comfort_gra+β×clarity_gra+γ×iv+δ;
16、其中,evaluation_grad为评价等级;comfort_gra为舒适度评价值;clarity_gra为目标物清晰度评价值;iv为路面亮度;α为舒适度评价系数;β为目标物清晰度评价系数;γ为路面亮度评价系数;δ为常系数。
17、可选的,基于所述评价等级,制定隧道改进措施,具体包括:
18、当所述评价等级=5时,所制定的隧道改进措施包括:
19、隧道洞口建立遮阳结构或罩棚;
20、隧道入口处的顶棚或挡板;
21、限制行车速度;
22、当所述评价等级=4时,所制定的隧道改进措施包括:
23、增加隧道入口和出口周围的绿化覆盖率;
24、在隧道出入口段种植高大树木;
25、限制行车速度;
26、当所述评价等级=3时,所制定的隧道改进措施包括:
27、在隧道入口和出口安装智能照明系统,根据光线条件自动调节亮度;
28、优化隧道入口和出口区域的道路设计,减少建筑物表面的反射和折射光线;
29、限制行车速度;
30、当所述评价等级=2时,所制定的隧道改进措施包括:
31、限制行车速度,提升隧道出入口的人工照明亮度;
32、当所述评价等级=1时,所制定的隧道改进措施包括:
33、在隧道出入口处设立警示牌,警示驾驶者在隧道出入口谨慎驾驶。
34、一种隧道行车安全改进措施制定系统,包括:
35、驾驶评价参数获取模块,用于基于视觉实验环境,在不同的路面亮度下,获取驾驶机器人的驾驶评价参数;所述视觉实验环境用于模拟在隧道出入口段行驶时的虚拟驾驶场景;所述驾驶评价参数包括舒适度评价值以及目标物清晰度评价值;
36、眩光评价模型构建模块,用于根据所述驾驶评价参数以及所述路面亮度构建眩光评价模型;
37、评价等级确定模块,用于根据所述眩光评价模型确定评价等级;
38、隧道行车安全改进措施制定模块,用于基于所述评价等级,制定隧道改进措施。
39、可选的,所述驾驶评价参数获取模块,具体包括:
40、舒适度评价表制定单元,用于根据光源亮度以及驾驶机器人眩目感制定舒适度评价表;
41、舒适度评价值确定单元,用于基于所述舒适度评价表,确定每个驾驶机器人的舒适度评价值。
42、可选的,获取驾驶机器人的驾驶评价参数,具体包括:
43、目标物清晰度评价表制定单元,用于根据驾驶机器人所看到的目标物轮廓清晰度以及目标细节清晰度制定目标物清晰度评价表;
44、清晰度评价值确定单元,用于基于所述目标物清晰度评价表,确定每个驾驶机器人的清晰度评价值。
45、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述隧道行车安全改进措施制定方法。
46、可选的,所述存储器为非暂态计算机可读存储介质,所述非暂态计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述隧道行车安全改进措施制定方法。
47、根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明通过构建眩光评价模型确定日光对驾驶者安全影响的评价等级,基于评价等级,针对性的制定隧道改进措施,在构建隧道时提供理论依据,以降低驾驶者的视觉不适,提升隧道洞内外行车的安全性。
技术特征:
1.一种隧道行车安全改进措施制定方法,其特征在于,包括:
2.根据权利要求1所述的隧道行车安全改进措施制定方法,其特征在于,获取驾驶机器人的驾驶评价参数,具体包括:
3.根据权利要求1所述的隧道行车安全改进措施制定方法,其特征在于,获取驾驶机器人的驾驶评价参数,具体包括:
4.根据权利要求1所述的隧道行车安全改进措施制定方法,其特征在于,所述眩光评价模型为:
5.根据权利要求1所述的隧道行车安全改进措施制定方法,其特征在于,基于所述评价等级,制定隧道改进措施,具体包括:
6.一种隧道行车安全改进措施制定系统,其特征在于,包括:
7.根据权利要求6所述的隧道行车安全改进措施制定系统,其特征在于,所述驾驶评价参数获取模块,具体包括:
8.根据权利要求6所述的隧道行车安全改进措施制定系统,其特征在于,获取驾驶机器人的驾驶评价参数,具体包括:
9.一种电子设备,其特征在于,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行如权利要求1-5中任一项所述的隧道行车安全改进措施制定方法。
10.根据权利要求9所述的电子设备,其特征在于,所述存储器为非暂态计算机可读存储介质,所述非暂态计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1-5中任一项所述的隧道行车安全改进措施制定方法。
技术总结
本发明提供了一种隧道行车安全改进措施制定方法、系统及设备,涉及隧道出入口段改进领域,该方法包括:基于视觉实验环境,在不同的路面亮度下,获取驾驶机器人的驾驶评价参数;所述视觉实验环境用于模拟在隧道出入口段行驶时的虚拟驾驶场景;所述驾驶评价参数包括舒适度评价值以及目标物清晰度评价值;根据所述驾驶评价参数以及所述路面亮度构建眩光评价模型;根据所述眩光评价模型确定评价等级;基于所述评价等级,制定隧道改进措施。本发明能够降低驾驶者的视觉不适,提高行车安全。
技术研发人员:叶蕾,朱建华,李正华,田浩,杨松,王锐,杨继厅,马非,汪成立,饶炎,曾荣
受保护的技术使用者:绍兴市柯诸高速公路有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!