虚实融合环境中路径引导系统及其工作方法
本发明属于虚拟现实的教学应用领域,更具体地,涉及虚实融合环境中路径引导系统和工作方法。
背景技术:
1、以chatgpt为代表的人工智能通用大模型的广泛应用,生成式人工智能(aigc)正快速渗透到教育领域的各个环节,其应用广度和深度将超过以往的程度。在虚实融合的教学场景中,路径引导技术能够帮助用户在真实环境中实现虚拟世界中定位、导航和避障,以更加轻松、高效的方式到达目的地或完成特定教学任务。根据用户的空间位置和视场范围,aigc可以提供智能避障、路径规划、路径优化以及实时导航等功能。虚实融合环境可汇聚物理—虚拟—社会三元空间信息,将会创造出一批新的教育应用形式和内容,塑造未来教育发展的新优势。如虚实融合环境下的路径引导可辅助感知能力较弱的师生用户,在场景元素较为复杂的教学环境中有效预测方向和规划行进路径。因此,aigc技术在虚实融合的教学环境中应用,能够丰富教学手段,有助于提高数字化转型大背景下教育教学的效果,具有广泛的应用价值。
2、当前虚实融合环境中路径引导还存在诸多的问题:(1)行进方向估算受多路径效应影响:当前方向估算主要依据场景元素的感应区域,而在布局紧密的教学空间中感应区域会相互干扰,导致用户难以准确预测行进方向;(2)路径规划未考虑特殊约束:传统路径规划通常只考虑静态障碍物,未考虑动态障碍物、地形环境以及其它师生用户位置的约束,生成的行进路径往往不符合用户的期望;(3)路径引导信息的过载:为了让用户更积极地参与教学活动,在虚实融合环境中常常提供大量的路径引导信息,包括繁琐的语音提示、复杂的图像呈现等,然而过量的引导信息会增加用户的认知负荷,导致用户产生空间的“信息迷航”。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种虚实融合环境中路径引导系统和工作方法,为新型数字化教学提供一种智能、系统的交互方法。
2、本发明的目的是通过以下技术措施实现的。
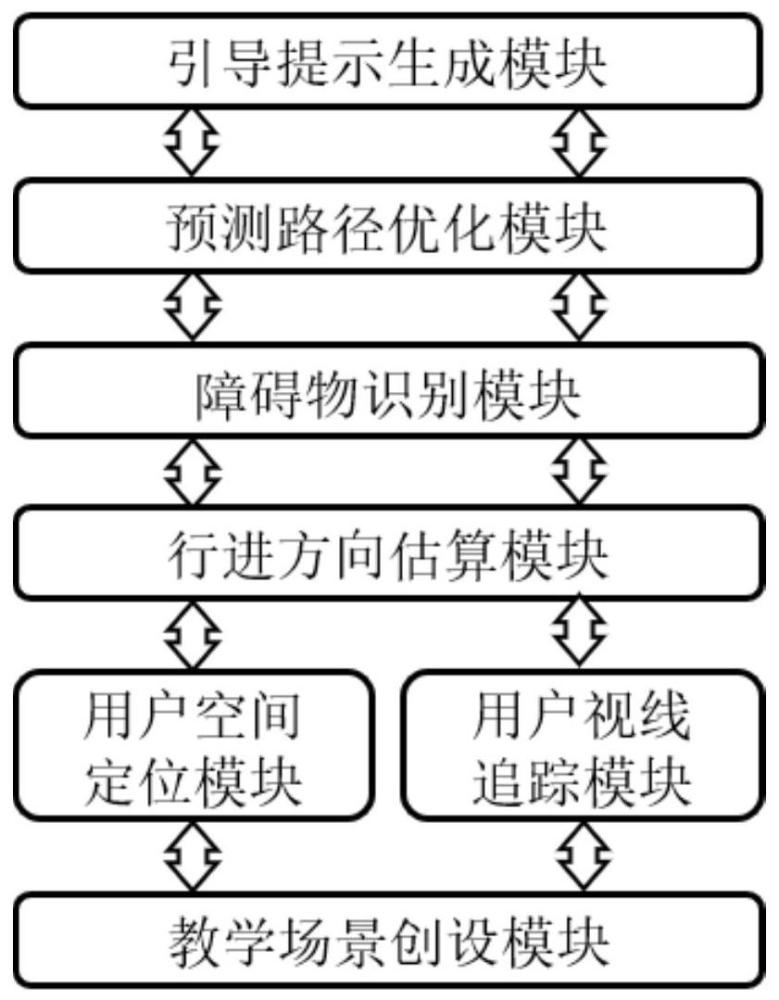
3、本发明提供一种虚实融合环境中路径引导系统,包括:
4、教学场景创设模块,用于拍摄多目图像,重建三维教学场景,布设和调整各个场景元素的参数;
5、用户空间定位模块,用于采集模型的点云坐标,生成教学空间的三维地图,确定用户的空间位置;
6、用户视线追踪模块,用于追踪用户的头部变化,更新视场内的信息,推断用户的视线方向,确定视线注视点;
7、行进方向估算模块,用于计算视线向量和注意线段之间的交点,推断用户在视场内可行进的方向;
8、障碍物识别模块,用于区分动态和静态障碍物,预测动态障碍物的运动轨迹,在2d鹰眼图上标记障碍物图标;
9、预测路径优化模块,用于预测可行走的候选路径,将阶梯教室的三维地图网格化,修正绕行、冗余、重复和非连续路径;
10、引导提示生成模块,用于将文本线索转换为导航指令,依据用户的视线方向,更新虚拟罗盘的指针方向。
11、本发明还提供一种上述的虚实融合环境中路径引导系统的工作方法,包括以下步骤:
12、(1)教学场景创设,运用多目摄像机沿着阶梯教室的走道台阶,拍摄阶梯教室的高清图像;使用多视图立体重建算法生成教学场景中墙壁、讲台、台阶、交互式电子白板和桌椅元素;在阶梯平面位置完成桌椅的布局,使用共轭梯度算法调整阶梯教室中各个场景元素的位置、朝向和姿态;
13、(2)用户空间定位,依据用户移动的位移和方向,结合移动前后位置点云数据的差值,确定各个模型的点云3d坐标,生成教学空间的实时三维地图;使用前方交会算法估算用户在三维地图中位置坐标;运用正射投影法生成教学空间的2d鸟瞰视图,使用不同的点、线、面符号表示教学空间中桌椅、讲台和走道;
14、(3)用户视线追踪,采用头部追踪算法实时检测用户的位置和姿态参数变化,更新该用户视场范围内障碍物、通行动线、其它师生用户的位置和姿态;使用卷积神经网络算法提取用户眼部区域图像的结构特征,推断用户的视线方向;采用视觉搜索算法确定用户的视线注视点坐标,并确定注视点所在区域为兴趣区域;
15、(4)行进方向估算,使用最小二乘拟合算法分析面片集合,提取各个近似三角面片的重心坐标,连接各个重心生成注视线段;根据用户的瞳孔位置和视线方向获得视线向量,使用参数化方程表示注视对象线段,运用数值法计算向量与参数化方程之间的相交点;采用航向估计算法推断用户在视场范围内可行进的方向;
16、(5)障碍物识别,将墙壁、讲台、桌椅和其它用户视作用户行进路线上的障碍物,采用卷积神经网络算法区分动态和静态障碍物;使用基于粒子群优化的启发式算法预测动态障碍物的运动轨迹;采用最近邻采样算法缩放障碍物图标的栅格图像,并标记到鹰眼图;
17、(6)预测路径优化,以用户所在当前位置作为起点,结合阶梯教室中三维地图的特征信息、静态障碍物和其它师生用户的位置,采用路径规划算法预测可行走的候选路径;根据用户的平均步长,在水平面上将阶梯教室的三维地图划分为正方形格网;使用双三次插值算法修正绕行、冗余、重复和非连续路径;
18、(7)引导提示生成,使用生成对抗网络算法生成上台阶、下台阶、直行、左转向和右转向的文本线索;使用词频-逆文档频率算法转换文本线索为导航指令,依次采用声学特征生成网络和声码器,将特征映射为语音信号;依据用户视线方向估计结果,更新虚拟罗盘的指针方向。
19、本发明的有益效果在于:
20、采用计算机视觉和深度学习技术生成教学空间三维地图,根据用户视场范围,推断该用户视线并定位空间视线,将注视对象线段化,检测用户视线与线段化的注视对象之间的交点,进而估计行进方向,根据教学空间中的静态和动态障碍物,以及预测的动态障碍物轨迹,规划为用户的行径路径,并由文本线索、语音导航以及罗盘指向提示,引导用户在教学空间中行进。本发明相较于现有技术,能够根据用户视场信息,实现更为精确的行进方向预测,并结合动态障碍物的运动轨迹,以此实现更符合用户期望的行进路径,削减繁琐、复杂的路径引导信息,提高用户在复杂环境中的空间认知能力和自主探索能力,从而实现高效的教学活动。
技术特征:
1.虚实融合环境中路径引导系统,其特征在于:包括教学场景创设模块、用户空间定位模块、用户视线追踪模块、行进方向估算模块、障碍物识别模块、预测路径优化模块和引导提示生成模块;
2.一种如权利要求1所述的虚实融合环境中路径引导系统的工作方法,其特征在于该方法包括以下步骤:
3.根据权利要求2所述的虚实融合环境中路径引导系统的工作方法,其特征在于步骤(1)中所述教学场景创设具体包括:
4.根据权利要求2所述的虚实融合环境中路径引导系统的工作方法,其特征在于步骤(2)中所述用户空间定位具体包括:
5.根据权利要求2所述的虚实融合环境中路径引导系统的工作方法,其特征在于步骤(3)中所述用户视线追踪具体包括:
6.根据权利要求2所述的虚实融合环境中路径引导系统的工作方法,其特征在于步骤(4)中所述行进方向估算具体包括:
7.根据权利要求2所述的虚实融合环境中路径引导系统的工作方法,其特征在于步骤(5)中所述障碍物识别具体包括:
8.根据权利要求2所述的虚实融合环境中路径引导系统的工作方法,其特征在于步骤(6)中所述预测路径优化具体包括:
9.根据权利要求2所述的虚实融合环境中路径引导系统的工作方法,其特征在于步骤(7)中所述引导提示生成具体包括:
技术总结
本发明属于虚拟现实的教学应用领域,提供一种虚实融合环境中路径引导系统和工作方法,包括教学场景创设、用户空间定位、用户视线追踪、行进方向估算、障碍物识别、预测路径优化和引导提示生成。本发明实现虚实融合空间中用户定位,根据用户视场范围,估算空间航向以及预测的动态障碍物轨迹,规划行径路径,并由引导提示,引导用户在阶梯教室教学空间中的路径。本发明能够聚合物理‑虚拟‑社会三元空间信息,有助于提高教育教学的效果。
技术研发人员:钟正,康宸,曾啸宇,习江涛,吴砥
受保护的技术使用者:华中师范大学
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!