一种基于对抗-训练的自动驾驶场景难度量化方法及系统
本申请实施例涉及自动驾驶算法的训练升级及测试评价,特别涉及一种基于对抗-训练的自动驾驶场景难度量化方法及系统。
背景技术:
1、自动驾驶是汽车产业与人工智能、自动化控制、大数据等新一代信息技术在交通领域交叉融合的体现,随着汽车智能化的大潮袭来,越来越多的产品配备了自动驾驶,越来越多的消费者青睐自动驾驶。高性能的自动驾驶系统可以实现自主感知、自主决策、自主规控,应对复杂的路况环境,安全且高效地完成预定驾驶任务。
2、随着自动驾驶技术的落地与大量普及,如何测试评价自动驾驶系统的性能优劣一直是业内的重要课题。传统的道路测试,具有周期长、效率低、耗费高等种种弊病,成为了自动驾驶系统快速改进与迭代的掣肘。
3、近年来,基于场景的仿真测试已成为自动驾驶系统测试评价技术的关键一环。场景会为自动驾驶系统测试提供具体的测试用例,从而有效测试其性能。然而,场景的生成依然严重依赖于人工干预,未能引入人工智能技术,从而在自动驾驶系统快速迭代下,自动获得基于场景的自动驾驶系统测试评价。
技术实现思路
1、本申请实施例提供一种基于对抗-训练的自动驾驶场景难度量化方法及系统,可实现不同自动驾驶系统在不同难易度场景下的性能评价。
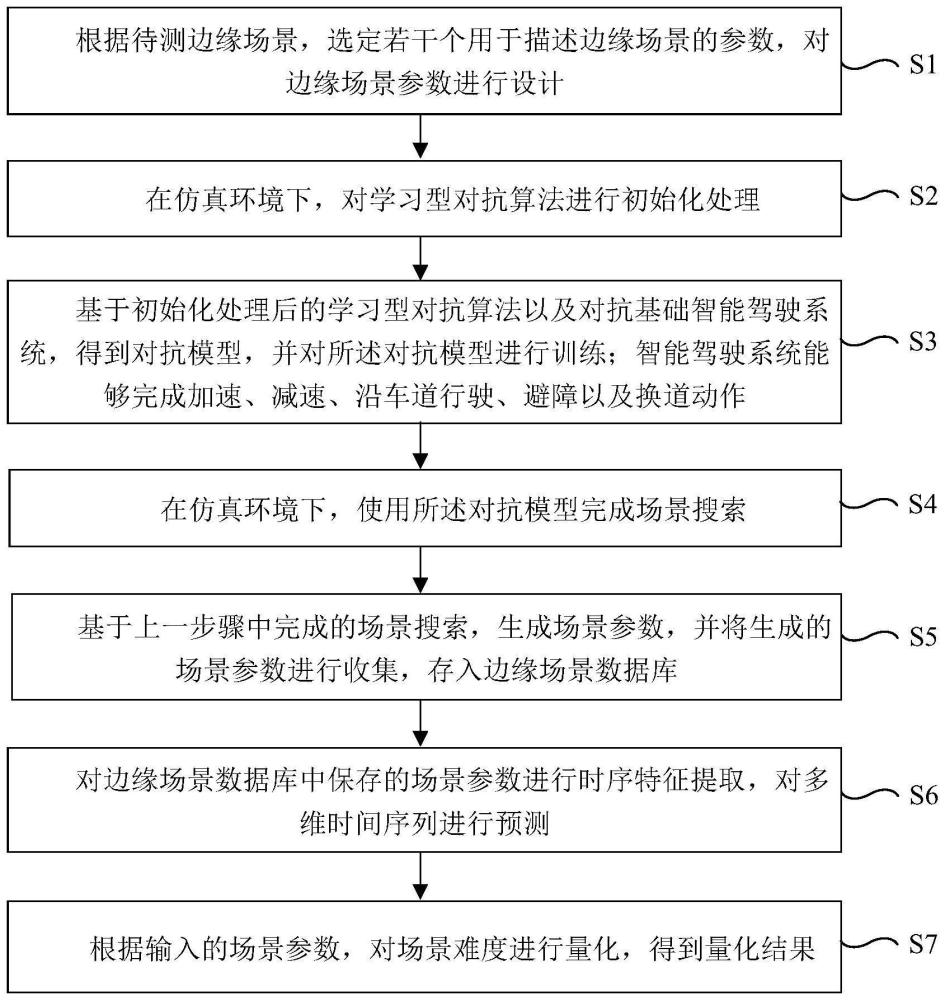
2、为解决上述技术问题,第一方面,本申请实施例提供一种基于对抗-训练的自动驾驶场景难度量化方法及系统,包括以下步骤:首先,根据待测边缘场景,选定若干个用于描述边缘场景的参数,对边缘场景参数进行设计;然后,在仿真环境下,对学习型对抗算法进行初始化处理;接下来,基于初始化处理后的学习型对抗算法以及对抗基础智能驾驶系统,得到对抗模型,并对该对抗模型进行训练;智能驾驶系统能够完成加速、减速、沿车道行驶、避障以及换道动作;在仿真环境下,使用对抗模型完成场景搜索;然后,基于上一步骤中完成的场景搜索,生成场景参数,并将生成的场景参数进行收集,存入边缘场景数据库;接下来,对边缘场景数据库中保存的场景参数进行时序特征提取,对多维时间序列进行预测;最后,根据输入的场景参数,对场景难度进行量化,得到量化结果。
3、在一些示例性实施例中,边缘场景是指自动驾驶汽车与其行驶环境各组成要素在一段时间内的总体动态描述,这些要素组成由所期望检验的自动驾驶汽车的功能决定;边缘场景参数包括:自车状态、交通参与者种类及状态、交通规则、地图、定位信息、气候条件以及道路组成。
4、在一些示例性实施例中,学习型对抗算法,包括自动驾驶中使用的深度学习、强化学习算法;初始化处理,包括:对算法的特定超参数设置、神经网络架构、奖励函数设计、训练回合与回合步数选定处理。
5、在一些示例性实施例中,对上述对抗模型进行训练,包括:通过环境间的不断交互,当对抗模型训练至能够覆盖某一级难度的场景时,通过自我对抗的思想,生成难度更高的场景,实现模型性能的螺旋上升。
6、在一些示例性实施例中,在仿真环境下,使用所述对抗模型完成场景搜索,包括:按照仿真环境中设定的采样步长时间,收集一系列模型生成的场景参数,复现对抗场景,使用所述对抗模型完成场景搜索。
7、在一些示例性实施例中,对边缘场景数据库中保存的场景参数进行时序特征提取,对多维时间序列进行预测,包括:将原始的时间序列数据转化为一组代表数据特征的向量或者矩阵,对时序特征进行提取;根据选定的场景参数以及提取的时序特征,建立多维时间序列模型;基于所述多维时间序列模型,对未来时刻的场景参数进行预测。
8、在一些示例性实施例中,对时序特征提取的方法包括:基于统计量的特征提取、基于频域分析的特征提取、基于小波变换的特征提取以及基于机器学习的特征提取。
9、在一些示例性实施例中,根据输入的场景参数,对场景难度进行量化,得到量化结果,包括:根据输入的场景参数,从多个维度以及多个量化指标共同衡量场景难度,对场景难度进行量化,得到量化结果。
10、第二方面,本申请实施例还提供了一种基于对抗-训练的自动驾驶场景难度量化系统,包括:依次连接的边缘场景设计模块、学习型对抗算法初始化模块、对抗模型训练模块、场景搜索模块、边缘场景数据库构建模块、多维时间序列预测模块以及场景难度量化模块;其中,边缘场景设计模块用于根据待测边缘场景,选定若干个用于描述边缘场景的参数,对边缘场景参数进行设计;学习型对抗算法初始化模块用于在仿真环境下,对学习型对抗算法进行初始化处理;对抗模型训练模块用于采用初始化处理后的学习型对抗算法,并基于对抗基础智能驾驶系统,得到对抗模型,并对所述对抗模型进行训练;所述智能驾驶系统能够完成加速、减速、沿车道行驶、避障以及换道动作;场景搜索模块用于在仿真环境下,使用所述对抗模型完成场景搜索;边缘场景数据库构建模块用于基于上一步骤中完成的场景搜索,生成场景参数,并将生成的场景参数进行收集,存入边缘场景数据库;多维时间序列预测模块用于对所述边缘场景数据库中保存的场景参数进行时序特征提取,对多维时间序列进行预测;场景难度量化模块用于根据输入的场景参数,对场景难度进行量化,得到量化结果。
11、在一些示例性实施例中,多维时间序列预测模块包括多维时间序列模型构建模块和预测模块;其中,多维时间序列模型构建模块用于将原始的时间序列数据转化为一组代表数据特征的向量或者矩阵,对时序特征进行提取;根据选定的场景参数以及提取的时序特征,建立多维时间序列模型;预测模块用于根据所述多维时间序列模型,对未来时刻的场景参数进行预测。
12、本申请实施例提供的技术方案至少具有以下优点:
13、本申请实施例提供一种基于对抗-训练的自动驾驶场景难度量化方法及系统,该方法包括以下步骤:首先,根据待测边缘场景,选定若干个用于描述边缘场景的参数,对边缘场景参数进行设计;然后,在仿真环境下,对学习型对抗算法进行初始化处理;接下来,基于初始化处理后的学习型对抗算法以及对抗基础智能驾驶系统,得到对抗模型,并对该对抗模型进行训练;智能驾驶系统能够完成加速、减速、沿车道行驶、避障以及换道动作;在仿真环境下,使用对抗模型完成场景搜索;然后,基于上一步骤中完成的场景搜索,生成场景参数,并将生成的场景参数进行收集,存入边缘场景数据库;接下来,对边缘场景数据库中保存的场景参数进行时序特征提取,对多维时间序列进行预测;最后,根据输入的场景参数,对场景难度进行量化,得到量化结果。
14、本申请实施例提出了一种自动驾驶场景难度量化架构,该架构可实现不同自动驾驶系统在不同难易度场景下的性能评价。本申请提出基于场景参数的潜在特征,可以更好地指导场景难度的评定,在评测过程中减少对外界条件的依赖。本申请提供的自动驾驶场景难度量化架构,不借助预定义规则或真实数据对比等外界支撑,聚焦于挖掘对抗过程中,场景参数本身的特征,完成场景难度的量化。
技术特征:
1.一种基于对抗-训练的自动驾驶场景难度量化方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于对抗-训练的自动驾驶场景难度量化方法,其特征在于,所述边缘场景是指自动驾驶汽车与其行驶环境各组成要素在一段时间内的总体动态描述,这些要素组成由所期望检验的自动驾驶汽车的功能决定;
3.根据权利要求1所述的基于对抗-训练的自动驾驶场景难度量化方法,其特征在于,所述学习型对抗算法,包括自动驾驶中使用的深度学习、强化学习算法;
4.根据权利要求1所述的基于对抗-训练的自动驾驶场景难度量化方法,其特征在于,对所述对抗模型进行训练,包括:
5.根据权利要求1所述的基于对抗-训练的自动驾驶场景难度量化方法,其特征在于,在仿真环境下,使用所述对抗模型完成场景搜索,包括:
6.根据权利要求1所述的基于对抗-训练的自动驾驶场景难度量化方法,其特征在于,对所述边缘场景数据库中保存的场景参数进行时序特征提取,对多维时间序列进行预测,包括:
7.根据权利要求6所述的基于对抗-训练的自动驾驶场景难度量化方法,其特征在于,对时序特征提取的方法包括:基于统计量的特征提取、基于频域分析的特征提取、基于小波变换的特征提取以及基于机器学习的特征提取。
8.根据权利要求1所述的基于对抗-训练的自动驾驶场景难度量化方法,其特征在于,根据输入的场景参数,对场景难度进行量化,得到量化结果,包括:
9.一种基于对抗-训练的自动驾驶场景难度量化系统,其特征在于,包括:依次连接的边缘场景设计模块、学习型对抗算法初始化模块、对抗模型训练模块、场景搜索模块、边缘场景数据库构建模块、多维时间序列预测模块以及场景难度量化模块;其中,
10.根据权利要求9所述的基于对抗-训练的自动驾驶场景难度量化系统,其特征在于,所述多维时间序列预测模块包括多维时间序列模型构建模块和预测模块;其中,
技术总结
本申请实施例涉及自动驾驶算法的训练升级及测试评价技术领域,特别涉及一种基于对抗‑训练的自动驾驶场景难度量化方法及系统,该方法包括:对边缘场景参数进行设计;在仿真环境下,对学习型对抗算法进行初始化处理;基于初始化处理后的学习型对抗算法以及对抗基础智能驾驶系统,得到对抗模型,并对该对抗模型进行训练;在仿真环境下,使用对抗模型完成场景搜索;基于场景搜索,生成场景参数,并将生成的场景参数存入边缘场景数据库;对边缘场景数据库中保存的场景参数进行时序特征提取,对多维时间序列进行预测;根据输入的场景参数,对场景难度进行量化,得到量化结果。本申请能够实现不同自动驾驶系统在不同难易度场景下的性能评价。
技术研发人员:黄岩军,王曹俊
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!