一种基于角度、对角线和目标前景信息的目标检测方法
本发明涉及人工智能,具体为一种基于角度、对角线和目标前景信息的目标检测方法。
背景技术:
1、随着深度学习和神经网络的发展,目标识别任务中训练出模型的精度得到了巨大的提升,在目标识别领域中,模型不仅需要识别图像中的目标类别,还需要准确定位目标在图像中的位置,边界框回归是其中一个重点,该研究方向与人工智能模型最终的训练效果密切相关。
2、目标检测的损失函数通常使用的是iou及其衍生版本,这些损失函数存在几个问题:
3、(1)当预测框和目标框存在包含关系时,giou会退化为iou,当预测框与真实框的中心点一致时,giou和diou会退化为iou,当预测框与真实框中心点一致且等高宽比时,giou、diou和ciou会退化为iou,导致收敛速度慢;
4、(2)当两框之间是包含关系时,无法区分两边框的相对位置,导致无法根据背景信息给予惩罚。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于角度、对角线和目标前景信息的目标检测方法,解决了边界框针对形状、大小以及前景信息收敛慢或无法收敛的问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:一种基于角度、对角线和目标前景信息的目标检测方法,具体包括以下步骤:
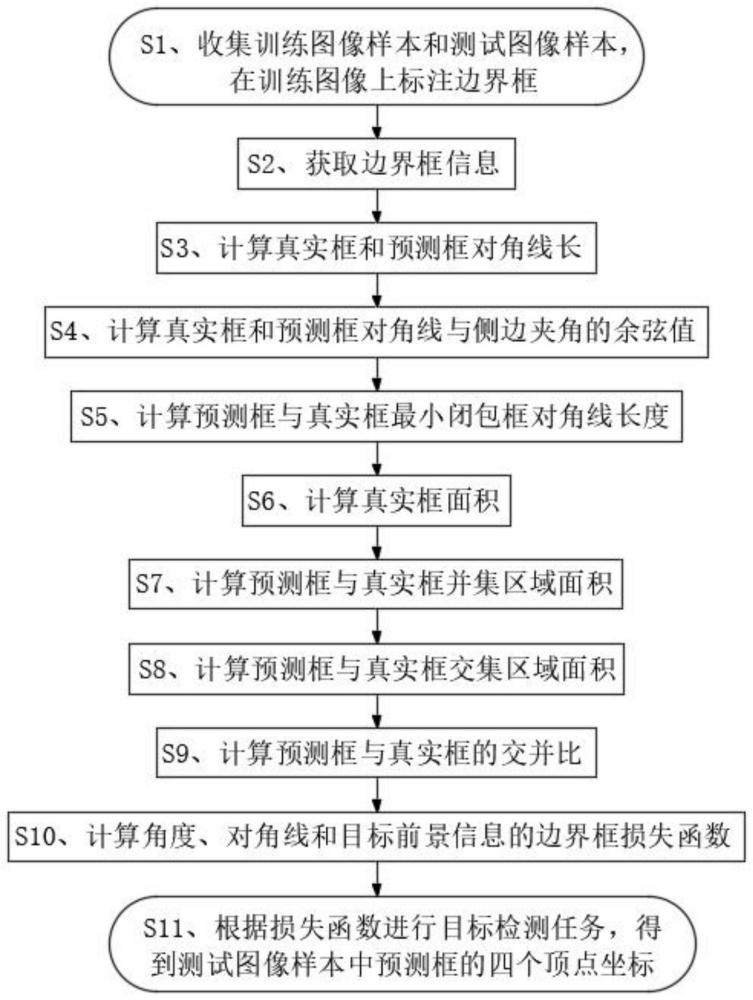
5、s1、收集训练图像样本和测试图像样本,在训练图像上标注边界框;
6、s2、获取边界框信息:预测框p=(xp,yp,wp,hp),真实框t=(xgt,ygt,wgt,hgt),其中,(x1,y1)和(x2,y2)分别表示预测框左上角点和右下角点的坐标,wp和hp分别表示预测框p的宽和高;和分别表示真实框左上角点和右下角点坐标,wgt和hgt分别表示真实框t的宽和高;
7、s3、计算真实框t的对角线d1和预测框p的对角线长d2;
8、s4、计算真实框t的对角线与侧边夹角的余弦值cosθ1和预测框p的对角线与侧边夹角的余弦值cosθ2;
9、s5、计算预测框p与真实框t最小闭包框对角线的长度lc;
10、s6、计算真实框t的面积st;
11、s7、计算预测框p与真实框t并集区域auni的面积suni;
12、s8、计算预测框p与真实框t交集区域ains的面积sins;
13、s9、计算预测框p与真实框t的交并比iou;
14、s10、计算角度、对角线和目标前景信息的边界框损失函数ldfiou;
15、s11、根据损失函数ldfiou进行目标检测任务,得到测试图像样本中预测框的四个顶点坐标。
16、本发明进一步设置为:所述s3中真实框t的对角线长d1和预测框p的对角线长d2的计算公式包括:
17、
18、
19、本发明进一步设置为:所述s4中真实框t的对角线与侧边夹角的余弦值cosθ1和和预测框的对角线与侧边夹角的余弦cosθ2计算公式包括:
20、
21、
22、本发明进一步设置为:所述s5中最小闭包框对角线的长度lc计算公式包括:
23、
24、本发明进一步设置为:所述s6中真实框t的面积st的计算公式包括:
25、st=(x1-x2)×(y1-y2)。
26、本发明进一步设置为:所述s7中并集区域面积suni的计算公式包括:
27、
28、
29、suni=wa×ha
30、式中,wa为并集区域auni的宽度,ha为并集区域auni的高度。
31、本发明进一步设置为:所述s8中交集区域面积sins的计算公式包括:
32、
33、
34、sins=wu×hu
35、式中,wu为交集区域ains的宽度,ha为交集区域ains的高度。
36、本发明进一步设置为:所述s9中交并比iou的计算公式包括:
37、
38、本发明进一步设置为:所述s10中边界框损失函数ldfiou的计算公式包括:
39、
40、(三)有益效果
41、本发明提供了一种基于角度、对角线和目标前景信息的目标检测方法。具备以下有益效果:
42、(1)本发明通过利用边界框的形状和尺寸信息,并在预测框与真实框重合的情况下利用背景信息,加速收敛,利用边界框对角线和对角线与边界框高的夹角取代边框中心点的距离,避免两边界框存在包含关系和中心点重合两种情况造成的iou及衍生版本的退化问题,加入前景信息的损失项,避免在两边框中心点重合且两框高宽比一致的情况下收敛速度慢的问题。
43、(2)本发明可以精准的识别小目标,具有高效巡检的效果。
技术特征:
1.一种基于角度、对角线和目标前景信息的目标检测方法,包括,其特征在于:具体包括以下步骤:
2.根据权利要求1所述的一种基于角度、对角线和目标前景信息的目标检测方法,其特征在于:所述s3中真实框t的对角线长d1和预测框p的对角线长d2的计算公式包括:
3.根据权利要求2所述的一种基于角度、对角线和目标前景信息的目标检测方法,其特征在于:所述s4中真实框t的对角线与侧边夹角的余弦值cosθ1和和预测框的对角线与侧边夹角的余弦cosθ2计算公式包括:
4.根据权利要求3所述的一种基于角度、对角线和目标前景信息的目标检测方法,其特征在于:所述s5中最小闭包框对角线的长度lc计算公式包括:
5.根据权利要求4所述的一种基于角度、对角线和目标前景信息的目标检测方法,其特征在于:所述s6中真实框t的面积st的计算公式包括:
6.根据权利要求5所述的一种基于角度、对角线和目标前景信息的目标检测方法,其特征在于:所述s7中并集区域面积suni的计算公式包括:
7.根据权利要求6所述的一种基于角度、对角线和目标前景信息的目标检测方法,其特征在于:所述s8中交集区域面积sins的计算公式包括:
8.根据权利要求7所述的一种基于角度、对角线和目标前景信息的目标检测方法,其特征在于:所述s9中交并比iou的计算公式包括:
9.根据权利要求8所述的一种基于角度、对角线和目标前景信息的目标检测方法,其特征在于:所述s10中边界框损失函数ldfiou的计算公式包括:
技术总结
本发明公开了一种基于角度、对角线和目标前景信息的目标检测方法,具体包括以下步骤:S1、收集训练图像样本和测试图像样本,在训练图像上标注边界框;S2、获取边界框信息;S3、计算真实框和预测框对角线长;S4、计算真实框和预测框对角线与侧边夹角的余弦值;S5、计算预测框与真实框最小闭包框对角线长度;S6、计算真实框面积;S7、计算预测框与真实框并集区域面积;S8、计算预测框与真实框交集区域面积;S9、计算预测框与真实框的交并比;S10、计算角度、对角线和目标前景信息的边界框损失函数;S11、根据损失函数进行目标检测任务,得到测试图像样本中预测框的四个顶点坐标;本发明涉及人工智能技术领域,可以进行精准的目标检测。
技术研发人员:张兆云,李劲鹏,赵洋
受保护的技术使用者:东莞理工学院
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!