一种基于FPGA的无人水声目标识别系统的制作方法
本发明涉及水声目标识别,具体涉及一种基于fpga的无人水声目标识别系统。
背景技术:
1、随着声呐技术的出现,作为声呐数据处理的重要后续环节的水声目标识别技术也应运而生。水声目标识别是指利用目标的辐射噪音提取特征信息并进行目标判别分类的信息处理技术。水声目标识别是对不同的声呐采集设备收集的时域数据进行多手段、跨域分析处理,消除环境和信道带来的畸变,提取能够表征待测目标本质的特征,并依据此特征对其进行分类识别的技术。
2、水下目标识别技术是海洋装备走向智能化不可或缺的关键技术,其在海洋资源勘测、海洋环境信息探查、水下信息侦察等领域有广泛的应用,自上世纪50年代起便有大量学者专家投身其中。由于海洋的战略地位日益突显,开发利用海洋资源和空间成为一项重要的课题。水中目标识别是被动声纳系统中最重要的功能需求之一,然而由于水下噪声环境随着不同的海域而变化,即使同一个海域会随着时间的变化,水温的变化以及水下深度的变化,形成不同的声场环境,水声目标识别的准确度一直很难得到稳定效果。声波是目前在海洋中唯一能够进行远距离传播的能量形式,水声目标识别对于海洋开发、国防安全有着重大意义,现已成为水声领域的研究热点之一。针对现代化战争中水下探测的需求,基于声音信号的水下目标分类识别也成为了水下探测领域的研究热点。水声目标的探测与识别对于水下作战以及水声目标感知具有关键作用,随着海军装备的信息化与智能化,水声目标识别是未来水上水下作战的先决条件,因此能否及时准确地对水声目标进行识别分析,是在海洋战争中掌握战争主动权的重要因素。由于对海洋音频的实采数据信息纯度不高,会使得在运用一些常规算法进行训练时,模型对数据进行预测的准确率不够高,不能够很好的对样本数据进行准确的识别。由于被动声纳具有隐蔽性强,传输距离长等优点,水下目标辐射噪声通过被动声纳采集是水声目标识别的主要信息来源。被动声纳系统具有良好的隐蔽性和灵活性,因此,如何利用被动声纳获取的舰船辐射噪声进行水下目标探测与识别成为了亟需解决的问题。但由于各种舰船隐身技术的应用以及海洋环境的复杂多样,基于舰船辐射噪声的水下目标识别任务面临着巨大挑战。
3、目前,针对不同的水下信息采集形式,主要研究方向包括图像识别和信号识别两类。其中,以目标辐射噪声为分析对象的水下声信号识别方法,以其有效范围大、适用条件广等特点,广泛应用于水下目标识别技术领域中。水声目标识别是一项利用目标辐射噪声信号对目标进行分类的技术,基于传统统计模型的分类识别方法主要由预处理、特征提取与选择、分类器三步组成,常见的特征有功率谱、听觉谱、噪声包络信号识别(detectionofenvelope modulation onnoise,简称demon)谱、低频分析记录(lowfrequencyanalysisrecording,简称lofar)谱、小波特征、响度特征、梅尔倒谱系数(mel-frequency cepstralcoefficients,简称mfcc)特征、感知线性预测(perceptual linearpredictive,简称plp)特征等,能否提取到可靠的特征将会直接影响到水声目标的识别率。传统的水声信号识别方法以目标特征提取及模式识别方法为核心。针对目标特点设计区分度更高的目标特征提取方法,并结合svm、神经网络等高效分类方法实现目标识别。
4、近年来,随着机器学习、深度学习等技术的良好发展,水声目标识别技术也取得了一些新的进展与研究结果。水声目标的探测与识别对于水下作战以及水声目标感知具有关键作用,随着海军装备的信息化与智能化,水声目标识别是未来水上水下作战的先决条件,因此能否及时准确地对水声目标进行识别分析,是在海洋战争中掌握战争主动权的重要因素。由于对海洋音频的实采数据信息纯度不高,会使得在运用一些常规算法进行训练时,模型对数据进行预测的准确率不够高,不能够很好的对样本数据进行准确的识别。基于神经网络(cnn)算法虽然能够相对较好的对数据信息进行识别,但是它本身的结构还是会使算法对一些与时间相关的数据信息有遗漏;长短期神经网络(lstm)在对数据信息时序特征上的识别有较好的效果,但是却没有cnn对于具有空间特征的数据处理的效果好。
5、水声目标识别基于神经网络(cnn)算法,目前常用的计算平台有cpu、gpu、专用asic集成电路等。cpu缺点是运行速度慢、功耗大。gpu优点是其具有高灵活性、通用性好,其缺点是其利用率/效率相对较低;专用asic集成电路可以实现极高的效率和特定算法的集成化,但是不具备灵活性,可以支持的算法范围较少。
技术实现思路
1、本发明的目的在于提供一种基于fpga的无人水声目标识别系统,用以解决现有技术存在的问题。
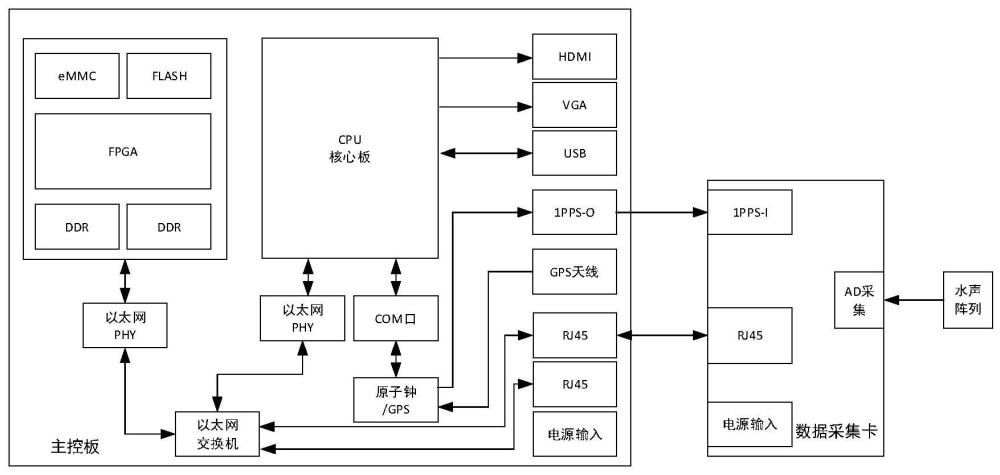
2、为实现上述目的,本发明的一种基于fpga的无人水声目标识别系统,用于基于eda工具链实现基于赛灵思xilinx的zynq ultrascale+mpsocs系列嵌入式平台的水声目标识别推理功能,由数据采集卡、fpga、cpu板卡以及其他附件组成,为提高系统稳定性及可靠性,所述无人水声目标识别系统将数据采集卡、fpga、cpu板卡以及其他附件设计在主控板上;
3、所述主控板将fpga、cpu板卡、原子钟和/或gps模块整合到一起,减少系统部件数量,fpga、cpu板卡、数据采集卡均采用网络交换机模块进行网络通信,fpga、cpu与所述网络交换机模块的连接为板内连接,连接稳定、通信可靠;
4、所述数据采集卡通过以太网将采集的水声数据发送到fpga内arm核ps,ps通过axi总线将水声数据传输至fpga逻辑部分pl,pl使用梅尔频率倒谱系数mfcc的ip核进行水声信号预处理,并将处理后的数据发送到卷积神经网络cnn,实现水声目标识别推理。
5、进一步,所述主控板引出两个rj45标准网络接头,方便与外部数据采集卡及其他设备通信。
6、进一步,所述主控板上的所述原子钟和/或gps模块通过com口与所述cpu板卡通信。
7、进一步,所述原子钟和/或gps模块的gps天线通过标准sma引入,同时将所述原子钟和/或gps模块的1pps信号引出至外部的数据采集卡。
8、进一步,所述主控板通过hdmi、vga、usb接口连接显示器、键盘鼠标。
9、本发明方法具有如下优点:
10、本发明使用fpga实现基于卷积神经网络的水声目标识别的算法,加快了水声目标识别算法运行时间,一次计算时间小于0.5s,减小了设备体积,降低了设备功耗,更加利于在系统中的应用。
技术特征:
1.一种基于fpga的无人水声目标识别系统,用于基于eda工具链实现基于赛灵思xilinx的zynqultrascale+mpsocs系列嵌入式平台的水声目标识别推理功能,由数据采集卡、fpga、cpu板卡以及其他附件组成,为提高系统稳定性及可靠性,所述无人水声目标识别系统将数据采集卡、fpga、cpu板卡以及其他附件设计在主控板上;
2.根据权利要求1所述的基于fpga的无人水声目标识别系统,其特征在于,所述主控板引出两个rj45标准网络接头,方便与外部数据采集卡及其他设备通信。
3.根据权利要求2所述的基于fpga的无人水声目标识别系统,其特征在于,所述主控板上的所述原子钟和/或gps模块通过com口与所述cpu板卡通信。
4.根据权利要求3所述的基于fpga的无人水声目标识别系统,其特征在于,所述原子钟和/或gps模块的gps天线通过标准sma引入,同时将所述原子钟和/或gps模块的1pps信号引出至外部的数据采集卡。
5.根据权利要求4所述的基于fpga的无人水声目标识别系统,其特征在于,所述主控板通过hdmi、vga、usb接口连接显示器、键盘鼠标。
技术总结
本发明公开了一种基于FPGA的无人水声目标识别系统,用于基于EDA工具链实现基于赛灵思Xilinx的Zynq UltraScale+MPSoCs系列嵌入式平台的水声目标识别推理功能,将数据采集卡、FPGA、CPU板卡以及其他附件设计在主控板上;所述数据采集卡通过以太网将采集的水声数据发送到FPGA内ARM核PS,PS通过AXI总线将水声数据传输至FPGA逻辑部分PL,PL使用梅尔频率倒谱系数MFCC的IP核进行水声信号预处理,并将处理后的数据发送到卷积神经网络CNN,实现水声目标识别推理。本发明基于FPGA实现了水声信号的采集、数据处理、目标识别等功能,提高计算效率,减小了设备体积,降低了设备功耗,更加利于此系统在实际中的应用。
技术研发人员:史钊亮
受保护的技术使用者:北京中海技创科技发展有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!