一种基于无人机激光雷达的田间花生株高估算方法
本发明属于无人机遥感测量及图像处理,具体涉及一种基于无人机激光雷达的田间花生株高估算方法。
背景技术:
1、花生是我国重要的油料作物,花生的高产稳产对于保障我国的油料安全、促进农业可持续发展至关重要。株高作为花生作物表型信息的重要组成部分,是动态衡量作物健康和整体生长状况的关键指标,被广泛用于大田作物地上生物量的估计,而生物量的估计又与作物的最终产量息息相关,因此,株高是衡量作物长势和育种筛选的重要农学产量。在花生的生长周期内,对花生株高的准确估测可以帮助管理者更好地掌握花生的生长信息,根据长势情况对其进行施肥、浇水等调控。
2、目前,测定花生株高的方法分为传统地面测量法与间接测量法两类。地面测量法则以传统的标尺人工测高为主,这种方法不仅费时费力,而且只能获取离散点的数据,无法得到面上的数据。而间接测量法中的图像处理方法虽然可以获取大范围的作物表层信息,但容易受到光照和天气等因素的影响,测量精度波动较大,更缺少穿透能力,无法实现株高、穗层和地表形貌的精确测量。
技术实现思路
1、为了解决上述问题,本发明提出了一种基于无人机激光雷达的田间花生株高估算方法,使用无人机搭载激光雷达这一主动遥感技术,凭借其对植被冠层具有很强的穿透性、能快速获取冠层详细的三维信息的优点,实现了对花生田地的实时监测,克服了传统方法破坏性强、时效性差、无法准确获取面数据的缺点,可以精准、无损、高效地获取花生株高信息,适合大尺度的农情监测。
2、本发明的技术方案如下:
3、一种基于无人机激光雷达的田间花生株高估算方法,包括如下步骤:
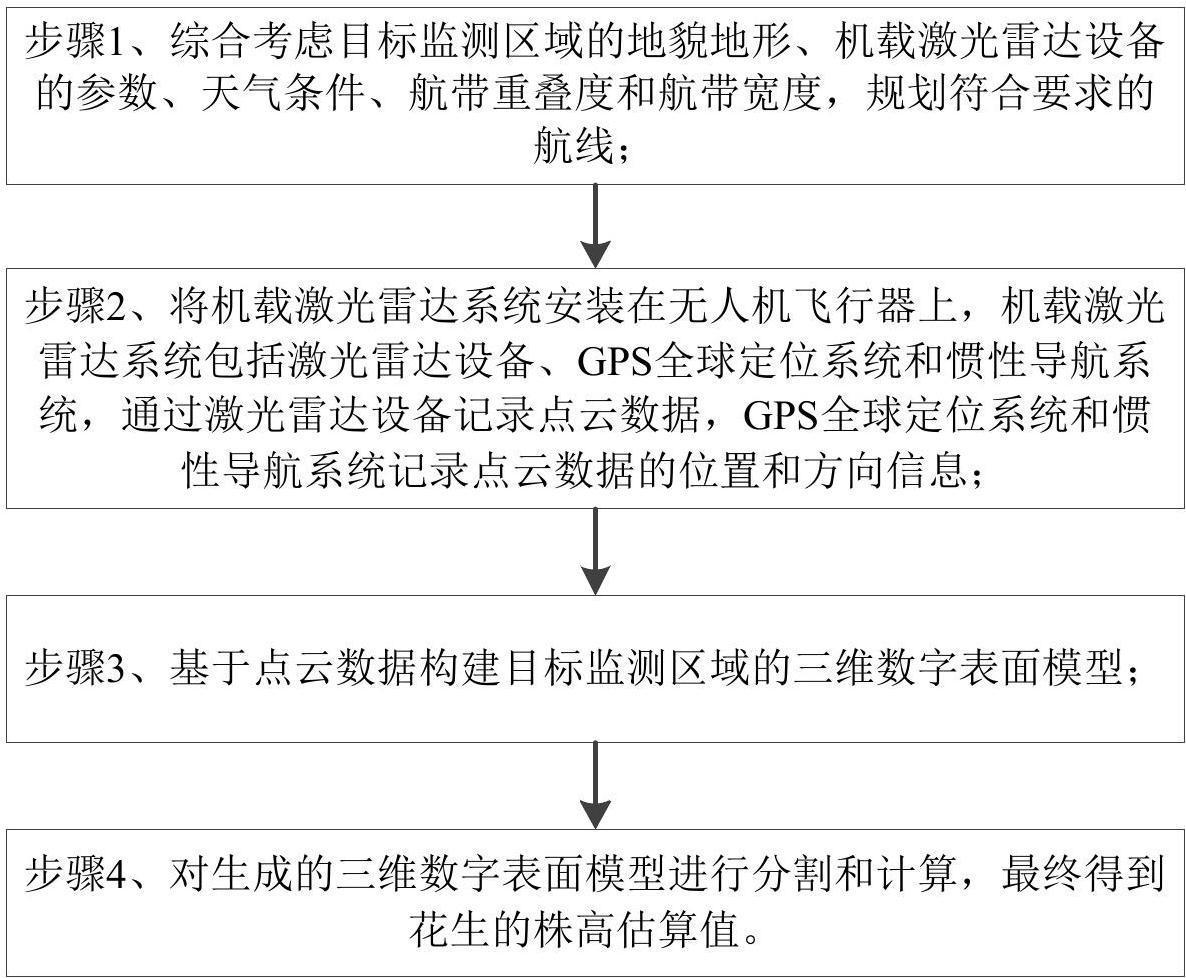
4、步骤1、综合考虑目标监测区域的地貌地形、机载激光雷达设备的参数、天气条件、航带重叠度和航带宽度,规划符合要求的航线;
5、步骤2、将机载激光雷达系统安装在无人机飞行器上,机载激光雷达系统包括激光雷达设备、gps全球定位系统和惯性导航系统,通过激光雷达设备记录点云数据,gps全球定位系统和惯性导航系统记录点云数据的位置和方向信息;
6、步骤3、基于点云数据构建目标监测区域的三维数字表面模型;
7、步骤4、对生成的三维数字表面模型进行分割和计算,最终得到花生的株高估算值。
8、进一步地,步骤1中,机载激光雷达设备的参数包括扫描角、相机镜头焦距、扫描频率;天气条件包括雾、云、烟尘、降雨。
9、进一步地,步骤2中,无人机按照规划的飞行高度和路径对目标监测区域进行数据采集,激光雷达发射激光脉冲并测量脉冲从无人机到地面的回程时间,以此计算距离,进而记录点的坐标信息,坐标信息以点云的形式保存,每个点都包含x、y、z坐标信息,以此来表示点在三维空间中的位置。
10、进一步地,步骤3的具体过程如下:
11、步骤3.1、使用大疆智图软件进行多条航线的点云数据拼接,生成合并后完整实验场景的点云模型;
12、步骤3.2、对拼接后的点云数据进行一次预处理,包括去噪、滤波、校准和分类操作;
13、步骤3.3、采用三维重建算法进行监测区域的三维建模。
14、进一步地,步骤3.2中,去噪操作采用密度聚类法,密度聚类算法将点云按相似性划分为不同的簇,将距离近且密度高的区域划分为同一簇,而将距离远且密度低的区域的点划分为异常点,然后删除异常点;滤波操作采用不规则三角网加密滤波算法,提取地面点;校准操作采用gps全球定位系统和惯性导航系统将点云数据准确定位到地球坐标系;分类操作采用大疆智图软件中的点云分类工具进行处理。
15、进一步地,步骤3.3的具体过程为:首先,通过构建三角网格生成地表的平滑模型,将点云数据网格化;然后,使用局部拟合曲面来逼近点云数据,通过曲面重建的方法转换为连续的三维表面;再然后,将采集的纹理信息映射到表面模型;最后,从表面模型中提取花生顶部的高程信息,分别生成裸土期数字表面模型和饱果成熟期数字表面模型。
16、进一步地,步骤4的具体过程如下:
17、步骤4.1、分别从裸土期数字表面模型和饱果成熟期数字表面模型中获取裸土期、饱果成熟期两个时期的点云数据,然后对裸土期、饱果成熟期两个时期的点云数据进行配准;
18、步骤4.2、将点云数据转为带有坐标信息的tiff格式文件,再对数据进行二次预处理,包括图像重采样和图像掩膜提取;
19、步骤4.3、利用arcmap中的栅格计算器工具,对饱果成熟期数字表面模型与裸土期数字高模型进行相减运算,得出目标监测区域的花生冠层高度模型;
20、步骤4.4、通过局部极大值估计算法,对整片田间上的各地块进行小区域划分,统计各地块上小区域的花生冠层高度模型的最大值,将最大值作为各地块上小区域的株高估算值,统计地块上小区域株高估算值的平均株高作为当前地块花生的株高,再对所有地块采用相同的估计方法进行计算,最终得到整片田间的花生株高估算值。
21、进一步地,步骤4.2中,图像重采样选择最邻近法,将与当前图像中距离某像元位置最近的像元值作为像元的新值,重采样输出像元大小与裸土期的数字高程模型的像元大小一致;图像掩膜提取的过程为:制作能覆盖整个目标监测区域的矢量文件,将矢量文件叠加在裸土期和饱果成熟期两幅图像上,按照矢量范围对图像进行掩膜提取。
22、本发明所带来的有益技术效果:低空无人机搭载激光雷达遥感技术为花生这一田间作物株高的提取提供了一种高效、便捷、高精度的技术。这一技术通过激光雷达系统,获取目标监测区域的点云数据,进而生成数字表面模型,从而实现快速的三维模型重建。结合栅格计算工具和局部极大值估计算法可以自动提取目标监测区域中花生的株高,并且保证较高的精度,从而可以高效率、高精度地获取全部区域内花生株高的变化情况,能够解决人工观测耗时耗力、以点代面、数据精度不一致等问题。本发明提出的新的花生株高监测技术具有采样速度快、采样精度高、采样范围广、无接触测量等显著优势。基于无人机激光雷达的低空遥感技术在花生的农情监测中拥有广阔的应用前景。它不仅有助于准确衡量作物的长势、实现精准农业的定量化和实时化,而且还为产量预测、育种筛选等应用领域提供了详实而丰富的数据支持。
技术特征:
1.一种基于无人机激光雷达的田间花生株高估算方法,其特征在于,包括如下步骤:
2.根据权利要求1所述基于无人机激光雷达的田间花生株高估算方法,其特征在于,所述步骤1中,机载激光雷达设备的参数包括扫描角、相机镜头焦距、扫描频率;天气条件包括雾、云、烟尘、降雨。
3.根据权利要求1所述基于无人机激光雷达的田间花生株高估算方法,其特征在于,所述步骤2中,无人机按照规划的飞行高度和路径对目标监测区域进行数据采集,激光雷达发射激光脉冲并测量脉冲从无人机到地面的回程时间,以此计算距离,进而记录点的坐标信息,坐标信息以点云的形式保存,每个点都包含x、y、z坐标信息,以此来表示点在三维空间中的位置。
4.根据权利要求1所述基于无人机激光雷达的田间花生株高估算方法,其特征在于,所述步骤3的具体过程如下:
5.根据权利要求4所述基于无人机激光雷达的田间花生株高估算方法,其特征在于,所述步骤3.2中,去噪操作采用密度聚类法,密度聚类算法将点云按相似性划分为不同的簇,将距离近且密度高的区域划分为同一簇,而将距离远且密度低的区域的点划分为异常点,然后删除异常点;滤波操作采用不规则三角网加密滤波算法,提取地面点;校准操作采用gps全球定位系统和惯性导航系统将点云数据准确定位到地球坐标系;分类操作采用大疆智图软件中的点云分类工具进行处理。
6.根据权利要求4所述基于无人机激光雷达的田间花生株高估算方法,其特征在于,所述步骤3.3的具体过程为:首先,通过构建三角网格生成地表的平滑模型,将点云数据网格化;然后,使用局部拟合曲面来逼近点云数据,通过曲面重建的方法转换为连续的三维表面;再然后,将采集的纹理信息映射到表面模型;最后,从表面模型中提取花生顶部的高程信息,分别生成裸土期数字表面模型和饱果成熟期数字表面模型。
7.根据权利要求1所述基于无人机激光雷达的田间花生株高估算方法,其特征在于,所述步骤4的具体过程如下:
8.根据权利要求7所述基于无人机激光雷达的田间花生株高估算方法,其特征在于,所述步骤4.2中,图像重采样选择最邻近法,将与当前图像中距离某像元位置最近的像元值作为像元的新值,重采样输出像元大小与裸土期的数字高程模型的像元大小一致;图像掩膜提取的过程为:制作能覆盖整个目标监测区域的矢量文件,将矢量文件叠加在裸土期和饱果成熟期两幅图像上,按照矢量范围对图像进行掩膜提取。
技术总结
本发明公开了一种基于无人机激光雷达的田间花生株高估算方法,属于无人机遥感测量及图像处理技术领域,包括如下步骤:步骤1、综合考虑目标监测区域的地貌地形、机载激光雷达设备的参数、天气条件、航带重叠度和航带宽度,规划符合要求的航线;步骤2、将机载激光雷达系统安装在无人机飞行器上,机载激光雷达系统包括激光雷达设备、GPS全球定位系统和惯性导航系统;步骤3、基于点云数据构建目标监测区域的三维数字表面模型;步骤4、对生成的三维数字表面模型进行分割和计算,最终得到花生的株高估算值。本发明可以精准、无损、高效地获取花生株高信息,适合大尺度的农情监测。
技术研发人员:乔丹,杨俊涛,李国卫,白波,李振海,杨吉顺
受保护的技术使用者:山东科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!