一种变转速行星齿轮箱质量评估方法与流程
本发明属于深度学习与故障诊断,具体涉及一种基于角域格拉姆角场和swintransformer的变转速行星齿轮箱质量评估方法。
背景技术:
1、行星齿轮箱是风电机组、直升机、舰船等大型机械设备的关键传动部件,具有传动比大、承载力强、传动平稳的优良特性。然而,由于其经常工作在强震、高温、腐蚀等恶劣环境,导致其内部结构容易发生故障,一旦故障发生,轻则影响设备运行状态,重则造成巨大经济损失甚至人员伤亡。因此,及时对行星齿轮箱的质量评估开展研究,对保证机械设备稳定运行,维护生命财产安全具有重要现实意义。
2、随着现代传感器、计算机通信以及电子技术的发展,基于振动信号的质量评估技术被广泛应用。但在实际工况中,非恒定转速导致测量信号的非平稳性,使传感器采集到的振动信号呈现出非线性、时变性的特点,导致现有大多数质量评估方法不再适用。因此,如何准确及时实现变转速工况下的行星齿轮箱质量评估,是当前研究重点。
3、深度学习方法能够自适应地从海量数据中学习并提取特征,解决传统人工提取的繁琐性和低效性问题。深度学习包含多种方法,特别以卷积神经网络(cnn)作为主干网络的算法在行星齿轮箱质量评估领域得到广泛的应用,但目前仍然存在一些问题,主要包括:cnn做卷积运算时的感受野受到其核大小和层数的严格限制,不利于捕获输入数据的长程依赖性。另一方面,cnn的卷积运算只关注图像的局部信息,这限制了像素间的交流。最近,swin transformer作为一种流行的深度学习模型,具有强大的捕获全局和远程信息的能力,可以识别数据中的相关故障模式,弥补卷积神经网络的不足之处。swin transformer以二维图像作为输入,在以其为基础的质量评估算法中,如何全面且有效地将原始振动信号转换为特征图像并为后续分类提供有利信息也成为一个难点。
技术实现思路
1、(一)要解决的技术问题
2、本发明提出一种基于角域格拉姆角场和swintransformer的变转速行星齿轮箱质量评估方法,以解决如何进行变转速工况下行星齿轮箱故障诊断的技术问题。
3、(二)技术方案
4、为了解决上述技术问题,本发明提出一种变转速行星齿轮箱质量评估方法,该变转速行星齿轮箱质量评估方法包括如下步骤:
5、s1.利用加速度传感器采集不同健康状态下变转速行星齿轮箱的一维振动信号,通过线调频小波路径追踪方法从一维振动信号中提取出离散的瞬时频率曲线,将离散的瞬时频率曲线拟合成连续曲线,再转化为转速曲线;
6、s2.通过转速曲线获取阶比跟踪方法中所需参考轴的等采样频率信号,利用角域采样率进行角域重采样,计算得到等角度时刻,对等角度时刻进行三次样条插值,得到角域信号;
7、s3.将角域信号通过格拉姆角场方法编码为二维图像数据集,采用one-hot的方式为不同故障类型下的二维图像数据集打上标签;从不同故障类型下的数据集中随机取多个样本,将样本划分为训练集和验证集;
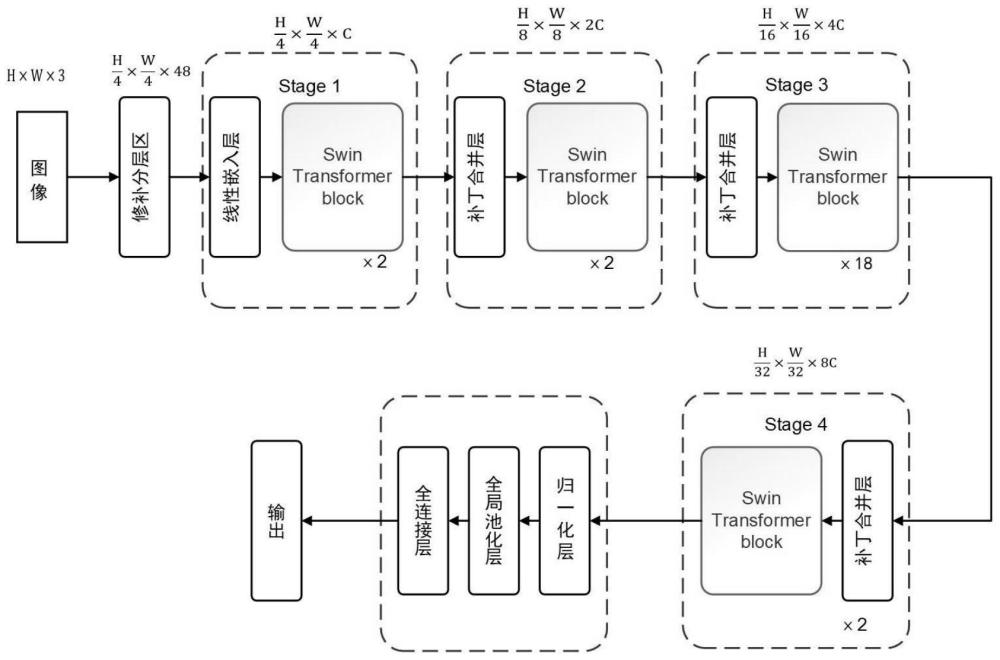
8、s4.建立swin-transformer网络模型,包括修补分层区、线性嵌入层、补丁合并层、swin transformerblock模块、归一化层、全局池化层和全连接层;设置优化器、批处理大小、学习率、迭代次数参数;
9、s5.将步骤s3中通过角域格拉姆角场生成的训练集输入到swin-transformer网络模型中进行训练,直到网络趋于收敛,得到预期的故障状态识别模型,训练完成并保存训练好的故障状态识别模型。
10、s6.将测试集输入到训练好的故障状态识别模型中,获取最终的故障诊断结果。
11、进一步地,步骤s1中,线调频小波路径追踪方法通过如下公式,提取瞬时频率:
12、d{haubui}={haubul(t)}={kaubuiexp[-i(aut+but2)]1i(t)}
13、式中,d为基元函数库;haubui(t)为多尺度线调频基元函数;i为动态分析时间段或时间支撑区,i=[kn2-j~(k+1)n2-j],k为动态时间分析段序号,k=0,1,…,2j-1,n为分析信号的采样长度,j为分析尺度系数,j=0,1,…,log2(n-1);kaubui为归一化系数;au为频率偏置系数;bu为调频率;1i(t)为矩形窗函数;t为时间。
14、进一步地,步骤s2中,角域采样定理为:
15、0s≥2×07,77ax
16、式中,os为角域采样率;omax为角域信号的最高阶次,计算公式如下:
17、
18、式中,fc为低通滤波器的截止频率,nmin为参考轴的最小转速;
19、根据以下公式,求得在任意转角θi时所产生的等角度时刻ti:
20、
21、式中,系数b0、b1、b2通过如下公式与三个连续到达的准确脉冲时刻t1、t2、t3及对应转角θ1、θ2、θ3进行矩阵运算:
22、
23、进一步地,步骤s3中,将角域信号通过格拉姆角场方法编码为224*224*3的二维图像数据集,采用one-hot的方式为牙有裂纹、缺齿、齿根故障、表面损伤、健康齿轮五种不同故障类型下的二维图像数据集打上标签;从五种不同故障类型下的数据集中随机取600个样本,共得到3000个样本,将样本按照8:2的比例划分为训练集和验证集。
24、进一步地,步骤s3中,通过格拉姆角场方法编码的过程为:
25、根据以下公式,对角域信号归一化,使所有值缩放至区间[-1,1]:
26、
27、根据以下公式,将归一化后的数值转换为极坐标形式:
28、
29、式中,α为序列经反余弦函数转换所得极坐标下的角度;si为i时刻的时间戳;n为正则化极坐标系统张成空间的常数因子;ri为转换后的极坐标半径;
30、将原始数据转换到极坐标系统后,将归一化后极坐标形式的数值构造为角域格拉姆角场,其构造矩阵如下式:
31、
32、进一步地,步骤s5中,通过调节内部参数,使准确率达到最优。
33、(三)有益效果
34、本发明提出一种变转速行星齿轮箱质量评估方法,首先利用线调频小波路径追踪算法拟合出原始时域信号的转速曲线,结合转速曲线和计算阶比跟踪方法完成时域信号的等角度重采样,将信号从时域转换到角域,消除非平稳性的影响;其次,根据格拉姆角场编码原理将角域信号编码为二维特征图像;最后,将特征图输入到信号移位窗口转换网络中进行质量特征的识别和分类,通过试验验证该方法对质量评估的准确性优于传统方法,能够提升变转速工况下行星齿轮箱的故障诊断准确率。
技术特征:
1.一种变转速行星齿轮箱质量评估方法,其特征在于,所述变转速行星齿轮箱质量评估方法包括如下步骤:
2.如权利要求1所述的变转速行星齿轮箱质量评估方法,其特征在于,步骤s1中,线调频小波路径追踪方法通过如下公式,提取瞬时频率:
3.如权利要求1所述的变转速行星齿轮箱质量评估方法,其特征在于,步骤s2中,角域采样定理为:
4.如权利要求1所述的变转速行星齿轮箱质量评估方法,其特征在于,步骤s3中,将角域信号通过格拉姆角场方法编码为224*224*3的二维图像数据集,采用one-hot的方式为牙有裂纹、缺齿、齿根故障、表面损伤、健康齿轮五种不同故障类型下的二维图像数据集打上标签;从五种不同故障类型下的数据集中随机取600个样本,共得到3000个样本,将样本按照8:2的比例划分为训练集和验证集。
5.如权利要求4所述的变转速行星齿轮箱质量评估方法,其特征在于,步骤s3中,通过格拉姆角场方法编码的过程为:
6.如权利要求1所述的变转速行星齿轮箱质量评估方法,其特征在于,步骤s5中,通过调节内部参数,使准确率达到最优。
技术总结
本发明提出一种变转速行星齿轮箱质量评估方法,首先利用线调频小波路径追踪算法拟合出原始时域信号的转速曲线,结合转速曲线和计算阶比跟踪方法完成时域信号的等角度重采样,将信号从时域转换到角域,消除非平稳性的影响;其次,根据格拉姆角场编码原理将角域信号编码为二维特征图像;最后,将特征图输入到信号移位窗口转换网络中进行质量特征的识别和分类,通过试验验证该方法对质量评估的准确性优于传统方法,能够提升变转速工况下行星齿轮箱的故障诊断准确率。
技术研发人员:张强,程燕,许晋,王乐,张玉东,邢庆坤,李亮,张静,李新毅,唐沛,贾爽,张鹤
受保护的技术使用者:中国北方车辆研究所
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!