基于航迹数据的多船搭靠行为检测方法和系统与流程
本发明涉及水面管控,具体地,涉及一种基于航迹数据的多船搭靠行为检测方法和系统。
背景技术:
1、船舶在水面作业时,船舶之间可能相互靠近,然后进行货物转移活动,但是由于船舶搭靠的地方通常在隐蔽的非近岸水域,无法通过视频画面进行监控、预防。因此如何解决有效发现在水面发生的搭靠行为是水面船舶管理行业的一大痛点。
2、专利文献cn106094676a公开了一种船舶位置监控系统,包括两个用于检测停靠船舶与码头平台之间距离的激光位移传感器,两个激光位移传感器将检测到的船舶位置信号传输至一控制器进行处理后,传输至监控终端,所述监控终端包括数据存储单元、显示单元、报警单元、异常数据判断单元和与数据存储单元、显示单元、报警单元和异常数据判断单元相连接的控制单元。然而该专利无法完全解决目前存在的技术问题。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种基于航迹数据的多船搭靠行为检测方法和系统。
2、根据本发明提供的基于航迹数据的多船搭靠行为检测方法,包括:
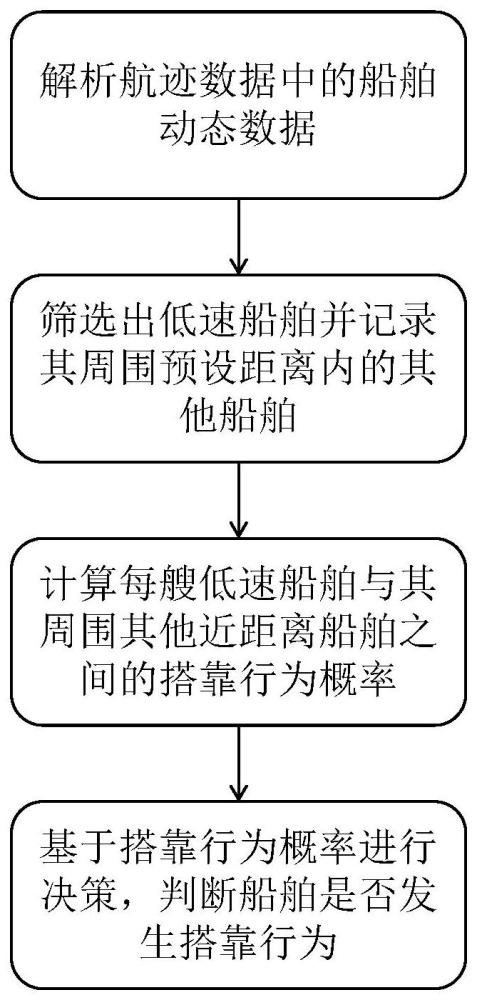
3、步骤s1:解析航迹数据中的船舶动态数据;
4、步骤s2:筛选出预设低速范围内的低速船舶并记录每个低速船舶周围预设距离内的其他船舶;
5、步骤s3:计算每艘低速船舶与其周围其他近距离船舶之间的搭靠行为概率;
6、步骤s4:基于搭靠行为概率进行决策,判断船舶是否发生实际搭靠。
7、优选地,从航迹数据解析到的船舶动态数据包括:位置点的经纬度;位置点的航向、航速;位置点的时间;位置点的船舶身份;位置点的船舶大小。
8、优选地,筛选低速船舶周围的其他船舶的过程为:设置初步筛选的距离阈值;以该距离为步进将地球按照经纬度进行网格化划分,网格坐标为实际经纬度除以步进,记录每个网格中的船舶;取出低速船舶周围9个网格中的所有目标。
9、优选地,船舶之间的搭靠行为概率计算过程为:
10、取出需要计算的两艘船的航迹列表;
11、
12、
13、其中,为第1艘船舶第n时刻的时间;为第1艘船舶第n时刻的经度;为第1艘船舶第n时刻的维度;为第1艘船舶第n时刻的速度;
14、判断两条航迹在时间上是否重叠;
15、若或则两艘船航迹时间不重叠;
16、若并且则两艘船航迹时间重叠范围为
17、若并且则两艘船航迹时间重叠范围为
18、若并且则两艘船航迹时间重叠范围为
19、若并且则两艘船航迹时间重叠范围为
20、计算两艘船航迹时间重叠范围内的距离及航速;
21、用近似平面距离作为两个经纬度的球面距离,表达式为:
22、
23、其中,i、j为序列号,1≤i、j≤n;
24、用两艘船的平均航速作为搭靠航速,表达式为:
25、
26、根据距离和航速序列计算搭靠行为概率;
27、序列值为:data=[(dst1,speed1),(dst2,speed2),...,(dstn,speedn)]
28、
29、最终概率:p=(m/n+r/n)*0.5;
30、其中,r、m为过程参数。
31、优选地,根据搭靠行为概率进行决策的过程为:
32、计算历史实际发生过的搭靠船舶的真实概率p真实={p1,p2,...,pn};
33、按照高斯分布对真实概率进行拟合,得到高斯分布的均值pmean;
34、根据最终概率p与均值pmean的关系进行决策;
35、当p≥pmean则认为船舶发生了实际搭靠;
36、当p<pmean则认为船舶没有发生实际搭靠。
37、根据本发明提供的基于航迹数据的多船搭靠行为检测系统,包括:
38、模块m1:解析航迹数据中的船舶动态数据;
39、模块m2:筛选出预设低速范围内的低速船舶并记录每个低速船舶周围预设距离内的其他船舶;
40、模块m3:计算每艘低速船舶与其周围其他近距离船舶之间的搭靠行为概率;
41、模块m4:基于搭靠行为概率进行决策,判断船舶是否发生实际搭靠。
42、优选地,从航迹数据解析到的船舶动态数据包括:位置点的经纬度;位置点的航向、航速;位置点的时间;位置点的船舶身份;位置点的船舶大小。
43、优选地,筛选低速船舶周围的其他船舶的过程为:设置初步筛选的距离阈值;以该距离为步进将地球按照经纬度进行网格化划分,网格坐标为实际经纬度除以步进,记录每个网格中的船舶;取出低速船舶周围9个网格中的所有目标。
44、优选地,船舶之间的搭靠行为概率计算过程为:
45、取出需要计算的两艘船的航迹列表;
46、
47、
48、其中,为第1艘船舶第n时刻的时间;为第1艘船舶第n时刻的经度;为第1艘船舶第n时刻的维度;为第1艘船舶第n时刻的速度;
49、判断两条航迹在时间上是否重叠;
50、若或则两艘船航迹时间不重叠;
51、若并且则两艘船航迹时间重叠范围为
52、若并且则两艘船航迹时间重叠范围为
53、若并且则两艘船航迹时间重叠范围为
54、若并且则两艘船航迹时间重叠范围为
55、计算两艘船航迹时间重叠范围内的距离及航速;
56、用近似平面距离作为两个经纬度的球面距离,表达式为:
57、
58、其中,i、j为序列号,1≤i、j≤n;
59、用两艘船的平均航速作为搭靠航速,表达式为:
60、
61、根据距离和航速序列计算搭靠行为概率;
62、序列值为:data=[(dst1,speed1),(dst2,speed2),...,(dstn,speedn)]
63、
64、最终概率:p=(m/n+r/n)*0.5;
65、其中,r、m为过程参数。
66、优选地,根据搭靠行为概率进行决策的过程为:
67、计算历史实际发生过的搭靠船舶的真实概率p真实={p1,p2,…,pn};
68、按照高斯分布对真实概率进行拟合,得到高斯分布的均值pmean;
69、根据最终概率p与均值pmean的关系进行决策;
70、当p≥pmean则认为船舶发生了实际搭靠;
71、当p<pmean则认为船舶没有发生实际搭靠。
72、与现有技术相比,本发明具有如下的有益效果:
73、本发明利用航迹数据进行搭靠行为检测,解决了视频发现不到搭靠行为的问题;本发明通过航迹数据进行搭靠行为检测,支持雷达或ais作为信号传感器进行航迹采集,可实现全天候搭靠检测。
技术特征:
1.一种基于航迹数据的多船搭靠行为检测方法,其特征在于,包括:
2.根据权利要求1所述的基于航迹数据的多船搭靠行为检测方法,其特征在于,从航迹数据解析到的船舶动态数据包括:位置点的经纬度;位置点的航向、航速;位置点的时间;位置点的船舶身份;位置点的船舶大小。
3.根据权利要求1所述的基于航迹数据的多船搭靠行为检测方法,其特征在于,筛选低速船舶周围的其他船舶的过程为:设置初步筛选的距离阈值;以该距离为步进将地球按照经纬度进行网格化划分,网格坐标为实际经纬度除以步进,记录每个网格中的船舶;取出低速船舶周围9个网格中的所有目标。
4.根据权利要求1所述的基于航迹数据的多船搭靠行为检测方法,其特征在于,船舶之间的搭靠行为概率计算过程为:
5.根据权利要求4所述的基于航迹数据的多船搭靠行为检测方法,其特征在于,根据搭靠行为概率进行决策的过程为:
6.一种基于航迹数据的多船搭靠行为检测系统,其特征在于,包括:
7.根据权利要求6所述的基于航迹数据的多船搭靠行为检测系统,其特征在于,从航迹数据解析到的船舶动态数据包括:位置点的经纬度;位置点的航向、航速;位置点的时间;位置点的船舶身份;位置点的船舶大小。
8.根据权利要求6所述的基于航迹数据的多船搭靠行为检测系统,其特征在于,筛选低速船舶周围的其他船舶的过程为:设置初步筛选的距离阈值;以该距离为步进将地球按照经纬度进行网格化划分,网格坐标为实际经纬度除以步进,记录每个网格中的船舶;取出低速船舶周围9个网格中的所有目标。
9.根据权利要求6所述的基于航迹数据的多船搭靠行为检测系统,其特征在于,船舶之间的搭靠行为概率计算过程为:
10.根据权利要求9所述的基于航迹数据的多船搭靠行为检测系统,其特征在于,根据搭靠行为概率进行决策的过程为:
技术总结
本发明提供了一种基于航迹数据的多船搭靠行为检测方法和系统,包括:步骤S1:解析航迹数据中的船舶动态数据;步骤S2:筛选出预设低速范围内的低速船舶并记录每个低速船舶周围预设距离内的其他船舶;步骤S3:计算每艘低速船舶与其周围其他近距离船舶之间的搭靠行为概率;步骤S4:基于搭靠行为概率进行决策,判断船舶是否发生实际搭靠。通过该方法可实现船舶搭靠行为的实时识别,及时获知船舶在水面可能进行的货物转移等相关活动。
技术研发人员:陶鹏宇,林德银
受保护的技术使用者:上海鹰觉科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!