用于无人驾驶矿车安全运营的数据管理方法与流程
本发明涉及数据处理,具体涉及用于无人驾驶矿车安全运营的数据管理方法。
背景技术:
1、随着网络技术与自动驾驶技术的发展,无人驾驶车辆的应用越来越广泛,例如无人驾驶矿车已广泛应用在矿山和采石场等环境。为确保无人驾驶车辆安全运营,对于无人驾驶车辆的数据管理变得至关重要,例如若无人驾驶矿车的数据管理不当,可能会导致无人驾驶矿车异常行驶,导致矿山或采石场的秩序混乱,甚至出现安全事故,或者导致无人驾驶矿车非正常停工造成矿山和采石场效率低下。
2、目前通常通过指数平滑法根据无人驾驶车辆的历史数据的变化趋势进行数据预测,根据预测结果识别无人驾驶车辆的异常情况。但指数平滑法对变化单一、较为平稳的数据预测更加准确,而无人驾驶车辆在运行过程中会有加速、减速以及匀速形式的情况,直接根据无人驾驶车辆的历史数据进行数据预测会在无人驾驶车辆运行状态发生变化时预测不准确,影响无人驾驶车辆的异常情况监测。
技术实现思路
1、为了解决上述问题,本发明提供用于无人驾驶矿车安全运营的数据管理方法,该方法包括以下步骤:
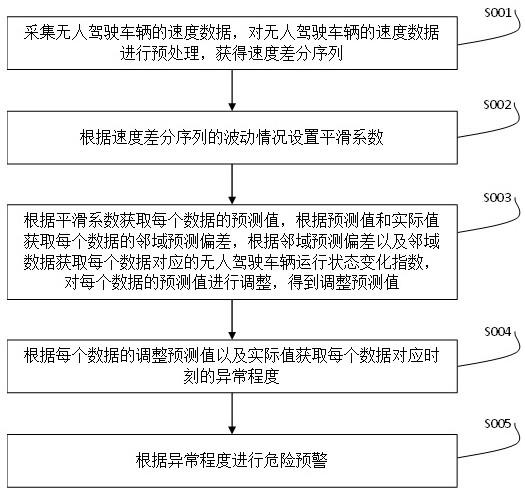
2、采集无人驾驶车辆的速度数据,根据速度数据获取速度差分序列;根据速度差分序列的波动情况设置平滑系数;
3、根据平滑系数通过指数平滑法获取速度差分序列中每个数据的预测值;据速度差分序列中每个数据的所有邻域数据的预测值和实际值获取每个数据的邻域预测偏差;根据每个数据的邻域预测偏差以及所有邻域数据获取每个数据对应的无人驾驶车辆运行状态变化指数;根据所述无人驾驶车辆运行状态变化指数对每个数据的预测值进行调整,得到调整预测值;
4、根据每个数据的调整预测值以及实际值获取每个数据对应时刻的异常程度,根据所述异常程度进行危险预警。
5、优选的,所述根据速度差分序列的波动情况设置平滑系数,包括的具体步骤如下:
6、随机在速度差分序列中截取任意长度的子串,作为样本数据;通过多次随机,得到多个样本数据;获取每个样本数据的波动程度,将所有样本数据的波动程度的均值作为平滑系数。
7、优选的,所述获取每个样本数据的波动程度,包括的具体步骤如下:
8、
9、其中,表示样本数据的波动程度,表示样本数据中包含的数据个数,表示样本数据中第个数据,表示样本数据的平均值,、分别表示样本数据中最大值和最小值。
10、优选的,所述邻域数据的获取方法如下:
11、预设局部数据数量;对于速度差分序列中前个数据中的每个数据,将每个数据之前的所有数据作为每个数据的邻域数据;对于速度差分序列中第个数据之后的每个数据,将每个数据之前的个数据作为每个数据的邻域数据。
12、优选的,所述根据速度差分序列中每个数据的所有邻域数据的预测值和实际值获取每个数据的邻域预测偏差,包括的具体步骤如下:
13、
14、其中,表示速度差分序列中第个数据的邻域预测偏差,表示速度差分序列中第个数据的第个邻域数据的预测值,表示速度差分序列中第个数据的第个邻域数据的实际值,表示速度差分序列中第个数据的邻域数据的数量。
15、优选的,所述根据每个数据的邻域预测偏差以及所有邻域数据获取每个数据对应的无人驾驶车辆运行状态变化指数,包括的具体步骤如下:
16、
17、其中,表示速度差分序列中第个数据对应的无人驾驶车辆运行状态变化指数,表示速度差分序列中第个数据的邻域预测偏差,表示速度差分序列中第个数据的邻域数据的数量,表示速度差分序列中第个数据的第个邻域数据,表示速度差分序列中第个数据的所有邻域数据的平均值,表示速度差分序列中第个数据的所有邻域数据的极差。
18、优选的,所述根据所述无人驾驶车辆运行状态变化指数对每个数据的预测值进行调整,得到调整预测值,包括的具体步骤如下:
19、
20、其中,表示速度差分序列中第个数据的调整预测值,表示速度差分序列中第个数据对应的无人驾驶车辆运行状态变化指数,表示速度差分序列中第个数据的预测值。
21、优选的,所述根据每个数据的调整预测值以及实际值获取每个数据对应时刻的异常程度,包括的具体步骤如下:
22、
23、其中,表示速度差分序列中第个数据对应时刻的异常程度,表示速度差分序列中第个数据的实际值,表示速度差分序列中第个数据的调整预测值。
24、优选的,所述根据所述异常程度进行危险预警,包括的具体步骤如下:
25、获取速度差分序列中所有数据对应的时刻的异常程度的均值,作为整体平均异常程度;获取当前时刻的数据以及其所有邻域数据对应的时刻的异常程度的均值,作为当前时刻的局部平均异常程度;根据当前时刻的局部平均异常程度与整体平均异常程度的大小关系进行危险预警。
26、优选的,所述根据当前时刻的局部平均异常程度与整体平均异常程度的大小关系进行危险预警,包括的具体步骤如下:
27、若当前时刻的局部平均异常程度大于整体平均异常程度,则发出无人驾驶车辆的异常预警,呼叫维护人员进行检查。
28、本发明的技术方案的有益效果是:本发明根据每个数据的所有邻域数据的预测值和实际值获取每个数据的邻域预测偏差,根据每个数据的邻域预测偏差以及所有邻域数据获取每个数据对应的无人驾驶车辆运行状态变化指数,对每个数据的预测值进行调整,使得得到的调整预测值充分考虑了无人驾驶车辆运行状态的变化情况,预测结果更加准确,依据调整预测值得到的每个时刻的异常程度更加准确,提高了无人驾驶车辆异常情况监测的准确性以及异常处置及时性,提高了无人驾驶车辆运行的安全性。进一步的,本发明获取无人驾驶车辆的速度差分序列,根据速度差分序列的波动情况设置平滑系数,考虑到速度差分序列相较于速度时序序列变化更加平缓,对于变化平缓的数据利用指数平滑得到的预测值更加准确,提高了无人驾驶车辆异常情况监测的准确性。
技术特征:
1.用于无人驾驶矿车安全运营的数据管理方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的用于无人驾驶矿车安全运营的数据管理方法,其特征在于,所述根据速度差分序列的波动情况设置平滑系数,包括的具体步骤如下:
3.根据权利要求2所述的用于无人驾驶矿车安全运营的数据管理方法,其特征在于,所述获取每个样本数据的波动程度,包括的具体步骤如下:
4.根据权利要求1所述的用于无人驾驶矿车安全运营的数据管理方法,其特征在于,所述邻域数据的获取方法如下:
5.根据权利要求1所述的用于无人驾驶矿车安全运营的数据管理方法,其特征在于,所述根据速度差分序列中每个数据的所有邻域数据的预测值和实际值获取每个数据的邻域预测偏差,包括的具体步骤如下:
6.根据权利要求1所述的用于无人驾驶矿车安全运营的数据管理方法,其特征在于,所述根据每个数据的邻域预测偏差以及所有邻域数据获取每个数据对应的无人驾驶车辆运行状态变化指数,包括的具体步骤如下:
7.根据权利要求1所述的用于无人驾驶矿车安全运营的数据管理方法,其特征在于,所述根据所述无人驾驶车辆运行状态变化指数对每个数据的预测值进行调整,得到调整预测值,包括的具体步骤如下:
8.根据权利要求1所述的用于无人驾驶矿车安全运营的数据管理方法,其特征在于,所述根据每个数据的调整预测值以及实际值获取每个数据对应时刻的异常程度,包括的具体步骤如下:
9.根据权利要求1所述的用于无人驾驶矿车安全运营的数据管理方法,其特征在于,所述根据所述异常程度进行危险预警,包括的具体步骤如下:
10.根据权利要求9所述的用于无人驾驶矿车安全运营的数据管理方法,其特征在于,所述根据当前时刻的局部平均异常程度与整体平均异常程度的大小关系进行危险预警,包括的具体步骤如下:
技术总结
本发明涉及数据处理技术领域,具体涉及用于无人驾驶矿车安全运营的数据管理方法,包括:获取无人驾驶车辆的速度差分序列,根据速度差分序列的波动情况设置平滑系数,根据平滑系数获取每个数据的预测值,根据每个数据的所有邻域数据的预测值和实际值获取每个数据的邻域预测偏差,根据每个数据的邻域预测偏差以及所有邻域数据获取每个数据对应的无人驾驶车辆运行状态变化指数,根据所述无人驾驶车辆运行状态变化指数对每个数据的预测值进行调整,得到调整预测值,根据每个数据的调整预测值以及实际值获取每个数据对应时刻的异常程度,根据所述异常程度进行危险预警。本发明对无人驾驶车辆的异常监测更加准确,提高了无人驾驶车辆运行的安全性。
技术研发人员:杨扬,胡心怡
受保护的技术使用者:上海伯镭智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!