一种AMT主箱被控对象模型搭建方法、系统及参数标定方法与流程
本发明涉及汽车行业的车辆动力学模型搭建领域,特别涉及一种电控机械式自动变速器的动力学模型的搭建,具体是一种amt主箱被控对象模型搭建方法、系统及参数标定方法。
背景技术:
1、中国专利“变速箱仿真试验系统”,公开号cn107121281a,公开日2017.09.01,公开一种变速箱仿真试验系统,包括工作台、主机、驱动电机、变速箱、变速箱控制器、连接机构、支座、测量部件和停止器,所述主机设置在工作台的非动作区域,所述驱动电机固定在工作台的一端,所述驱动电机通过连接机构与变速箱连接,并且变速箱通过支座与工作台固定连接,主机根据仿真条件中对驱动电机的转速和变速箱的输出转速计算出实际传动比,并输出实际传动比至显示设备上。
2、上述专利存在以下问题:
3、缺点一、仿真系统基于三维空间模型搭建,运算时数据量大,实时性差;
4、缺点二、系统只适用于计算变速箱的转速比和扭矩输入/输出比等,模型扩展性比较差。如果需要分析变速箱输入轴扭矩以及转速变化的细节则无法体现。
技术实现思路
1、针对背景技术中存在的问题,本发明的目的在于提供一种对计算机算例要求比较小的,高实时性的,适用于硬件在环这种实时仿真环境的amt主箱被控对象模型搭建方法、系统及参数标定方法。
2、为达到上述目的,第一方面,本发明设计的amt主箱被控对象模型搭建方法,包括以下步骤:将amt主箱的多个档位的传动比存储在向量v中;根据多个同步器的位移情况,选择对应档位的传动比进行输出;判断在同一时刻只有一个同步器起作用,其余同步器传动比输出为0;根据换挡位移判断同步器处于锁止状态、未锁止状态或换挡状态,并输出相应的扭矩。
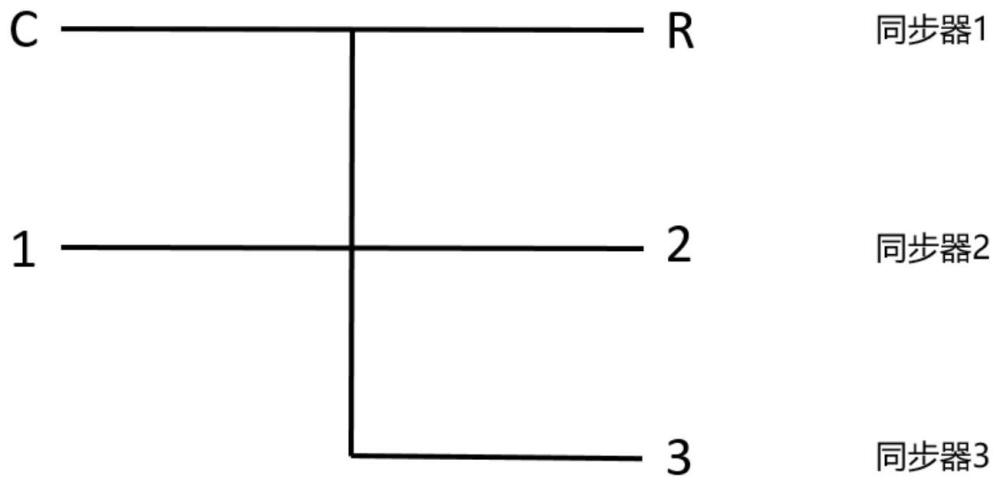
3、优选的,所述多个档位包括c档、r档、1档、2档和3档。
4、优选的,所述根据多个同步器位移情况选择对应档位传动比的步骤包括:当第一同步器位移大于0时,输出c档传动比;当第一同步器位移小于0时,输出r档传动比;当第一同步器位移等于0时,输出0;当第二同步器位移大于0时,输出2档传动比;当第二同步器位移小于0时,输出1档传动比;当第二同步器位移等于0时,输出0;当第三同步器位移大于0时,输出3档传动比;当第三同步器位移等于0时,输出0。
5、优选的,所述判断同步器锁止状态的步骤包括:当换挡位移大于第一预设值时,确定为锁止状态;当换挡位移小于第二预设值时,确定为未锁止状态;当换挡位移位于第一预设值和第二预设值之间时,确定为换挡状态。
6、与现有技术相比,该方案模型简易、实时性强,能用于硬件在环仿真。
7、第二方面,本发明设计的amt主箱被控对象模型搭建系统,包括:
8、传动比存储模块,用于存储amt主箱的档位传动比;
9、同步器判断模块,用于判断同步器的位移情况;
10、传动比选择模块,用于根据同步器位移选择对应的传动比;
11、锁止判断模块,用于根据换挡位移判断同步器是否锁止;
12、输出模块,用于综合判断后输出最终的传动比或扭矩。
13、该系统通过存储传动比、判断同步器状态、选择传动比的模式搭建amt主箱模型,能用于各种仿真环境。
14、优选的,所述传动比存储模块存储的多个档位包括c档、r档、1档、2档和3档。
15、优选的,所述传动比选择模块具体用于:当第一同步器位移大于0时,输出c档传动比;当第一同步器位移小于0时,输出r档传动比;当第一同步器位移等于0时,输出0;当第二同步器位移大于0时,输出2档传动比;当第二同步器位移小于0时,输出1档传动比;当第二同步器位移等于0时,输出0;当第三同步器位移大于0时,输出3档传动比;当第三同步器位移等于0时,输出0。
16、优选的,所述锁止判断模块具体用于:当换挡位移大于第一预设值时,确定为锁止状态;当换挡位移小于第二预设值时,确定为未锁止状态;当换挡位移位于第一预设值和第二预设值之间时,确定为换挡状态。
17、第三方面,本发明设计的amt主箱被控对象模型的参数标定方法,包括以下步骤:获取实车变速过程中的传动比和扭矩数据;调整模型中的同步器判定参数,使模型输出的换挡时刻与实测换挡时刻一致;调整模型中的摩擦因数,使模型输出的扭矩与实测扭矩一致。该方法通过标定提高模型精度,可用于实车匹配及动力学仿真。
18、优选的,所述获取实车数据的步骤包括:测试实车变速过程中的输入轴扭矩和输出轴转速。
19、优选的,所述调整同步器判定参数的步骤包括:调整同步器轴向位移的判断阈值。
20、优选的,还包括:重复调整同步器判定参数和摩擦因数,直至模型输出结果与实测结果达到要求精度。
21、与现有技术相比,该方法标定简单有效,提高了模型精度。
22、本发明有益效果是:
23、1、使用数学模型对amt选换挡被控对象模型进行描述,模型简易,对计算机算例要求低,实时性强,能够广泛用于硬件在环等实时性要求比较高的仿真环境中。
24、2、根据当前选档位移与换挡位移的实时位置,选择匹配的传动比,传动比更新快。
25、3、使用向量与传动比的组合描述出当前选档位移与换挡位移的位置,简单方便,同时还仿真出真实amt的锁止机构的功能。
26、4、可扩展性强,可对选换挡位移进行处理,搭建故障注入模型,模拟实车遇到的各种卡滞故障。
27、5、具有同步器模型,能仿真换挡时的同步过程,工况适应性更好,模型仿真精度更高。
28、本发明包括传动比的选择、选档位移与换挡位移的判断、传动比的计算、同步器模块等。通过对选档位移与换挡位移的检测,确定当前哪一个同步器处于激活状态,从而输出匹配的传动比。本发明基于数学模型搭建,实时性好,广泛用于硬件在环测试等实时性要求比较高的仿真测试环境中。
技术特征:
1.一种amt主箱被控对象模型搭建方法,其特征在于,包括以下步骤:将amt主箱的多个档位的传动比存储在向量v中;根据多个同步器的位移情况,选择对应档位的传动比进行输出;判断在同一时刻只有一个同步器起作用,其余同步器传动比输出为0;根据换挡位移判断同步器处于锁止状态、未锁止状态或换挡状态,并输出相应的扭矩。
2.根据权利要求1所述的amt主箱被控对象模型搭建方法,其特征在于:所述多个档位包括c档、r档、1档、2档和3档。
3.根据权利要求1所述的amt主箱被控对象模型搭建方法,其特征在于:所述根据多个同步器位移情况选择对应档位传动比的步骤包括:当第一同步器位移大于0时,输出c档传动比;当第一同步器位移小于0时,输出r档传动比;当第一同步器位移等于0时,输出0;当第二同步器位移大于0时,输出2档传动比;当第二同步器位移小于0时,输出1档传动比;当第二同步器位移等于0时,输出0;当第三同步器位移大于0时,输出3档传动比;当第三同步器位移等于0时,输出0。
4.根据权利要求1所述的amt主箱被控对象模型搭建方法,其特征在于:所述判断同步器锁止状态的步骤包括:当换挡位移大于第一预设值时,确定为锁止状态;当换挡位移小于第二预设值时,确定为未锁止状态;当换挡位移位于第一预设值和第二预设值之间时,确定为换挡状态。
5.一种amt主箱被控对象模型搭建系统,包括:
6.根据权利要求5所述的amt主箱被控对象模型搭建方法,其特征在于:所述传动比选择模块具体用于:当第一同步器位移大于0时,输出c档传动比;当第一同步器位移小于0时,输出r档传动比;当第一同步器位移等于0时,输出0;当第二同步器位移大于0时,输出2档传动比;当第二同步器位移小于0时,输出1档传动比;当第二同步器位移等于0时,输出0;当第三同步器位移大于0时,输出3档传动比;当第三同步器位移等于0时,输出0。
7.根据权利要求5所述的amt主箱被控对象模型搭建方法,其特征在于:所述锁止判断模块具体用于:当换挡位移大于第一预设值时,确定为锁止状态;当换挡位移小于第二预设值时,确定为未锁止状态;当换挡位移位于第一预设值和第二预设值之间时,确定为换挡状态。
8.一种amt主箱被控对象模型的参数标定方法,包括以下步骤:获取实车变速过程中的传动比和扭矩数据;调整模型中的同步器判定参数,使模型输出的换挡时刻与实测换挡时刻一致;调整模型中的摩擦因数,使模型输出的扭矩与实测扭矩一致。
9.根据权利要求8所述的amt主箱被控对象模型搭建方法,其特征在于:所述获取实车数据的步骤包括:测试实车变速过程中的输入轴扭矩和输出轴转速;所述调整同步器判定参数的步骤包括:调整同步器轴向位移的判断阈值。
10.根据权利要求8所述的amt主箱被控对象模型搭建方法,其特征在于:还包括:重复调整同步器判定参数和摩擦因数,直至模型输出结果与实测结果达到要求精度。
技术总结
本发明公开一种AMT主箱被控对象模型搭建方法、系统及参数标定方法。包括传动比的选择、选档位移与换挡位移的判断、传动比的计算、同步器模块等。通过对选档位移与换挡位移的检测,确定当前哪一个同步器处于激活状态,从而输出匹配的传动比。本发明基于数学模型搭建,实时性好,广泛用于硬件在环测试等实时性要求比较高的仿真测试环境中。
技术研发人员:赵毅,李栋文,陈大伟,徐世杰,敬丹青,熊自远,黄冲,杨海波,曾振威,江朋
受保护的技术使用者:东风商用车有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!