模态预测方法、装置、设备及存储介质与流程
本发明涉及数据处理,尤其涉及一种模态预测方法、装置、设备及存储介质。
背景技术:
1、机器人的模态仿真分析是一项重要的工程技术,旨在评估机器人的结构设计、优化控制算法以及寻找潜在的问题,有助于提高机器人性能和安全性。同时通过模态仿真分析,可以降低研发与测试的风险和成本。现有方案仅集中在对单一姿态的机器人进行模态分析,没有考虑机器人在运行过程中的动态变化,无法捕捉到机器人在不同位姿下的模态数据。因此,如何实时有效地对机器人在不同的位姿下的模态数据进行预测,成为一个亟待解决的问题。
技术实现思路
1、本发明的主要目的在于提供了一种模态预测方法、装置、设备及存储介质,旨在解决如何实时有效地对机器人在不同的位姿下的模态数据进行预测的技术问题。
2、为实现上述目的,本发明提供了一种模态预测方法,所述模态预测方法包括以下步骤:
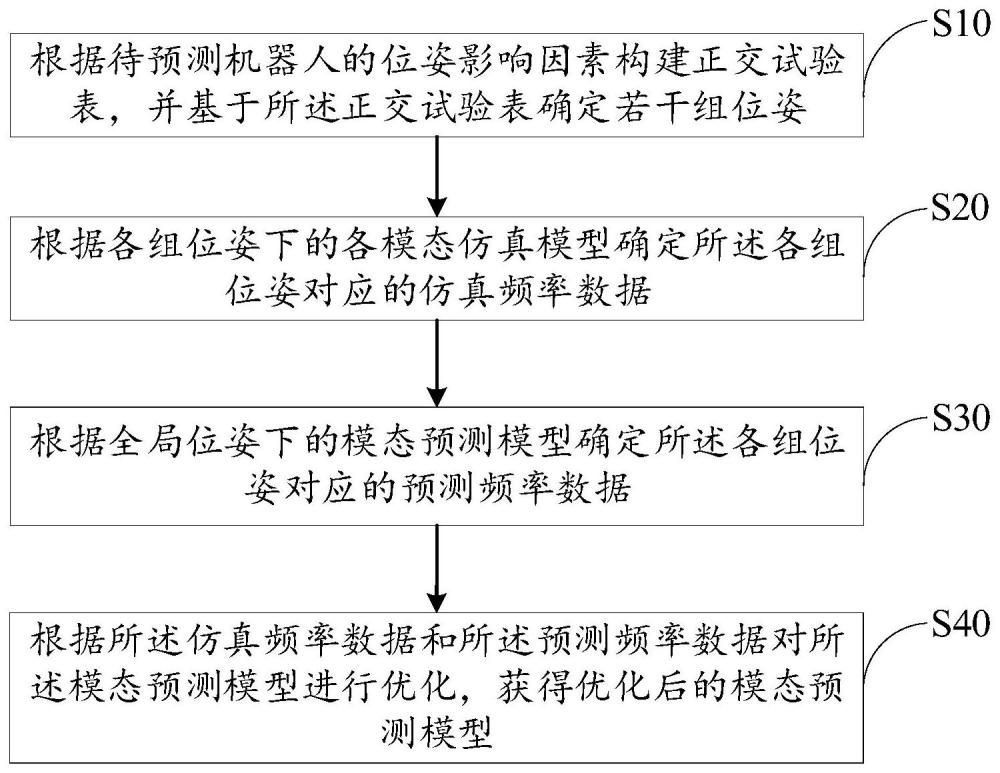
3、根据待预测机器人的位姿影响因素构建正交试验表,并基于所述正交试验表确定若干组位姿;
4、根据各组位姿下的各模态仿真模型确定所述各组位姿对应的仿真频率数据;
5、根据全局位姿下的模态预测模型确定所述各组位姿对应的预测频率数据;
6、根据所述仿真频率数据和所述预测频率数据对所述模态预测模型进行优化,获得优化后的模态预测模型。
7、可选地,所述根据待预测机器人的位姿影响因素构建正交试验表,并基于所述正交试验表确定若干组位姿的步骤,具体包括:
8、获取待预测机器人的位姿影响因素,所述位姿影响因素包括:一轴角度、二轴角度、丝杆移动信息以及负载大小;
9、基于所述一轴角度、所述二轴角度、所述丝杆移动信息以及所述负载大小构建正交试验表;
10、基于所述正交试验表进行正交试验,并根据试验结果确定若干组位姿。
11、可选地,所述根据各组位姿下的各模态仿真模型确定所述各组位姿对应的仿真频率数据的步骤,具体包括:
12、对待检测机器人的初始几何模型进行几何前处理,获得目标几何模型;
13、将所述目标几何模型导入至预设有限元仿真软件中进行有限元仿真,获得初始模态仿真模型;
14、对所述初始模态仿真模型进行训练,获得目标模态仿真模型;
15、根据所述目标模态仿真模型对应的模型参数确定各组位姿下的各模态仿真模型,并根据所述各模态仿真模型确定所述各组位姿对应的仿真频率数据。
16、可选地,所述对所述初始模态仿真模型进行训练,获得目标模态仿真模型的步骤,具体包括:
17、基于所述初始模态仿真模型确定所述待检测机器人在预设位姿下的特定前三阶频率数据和特定前三阶振型;
18、获取所述待检测机器人在所述预设位姿下的实际前三阶频率数据和实际前三阶振型;
19、根据所述特定前三阶频率数据、特定前三阶振型所述实际前三阶频率数据以及所述实际前三阶振型对所述初始模态仿真模型进行训练,获得目标模态仿真模型。
20、可选地,所述根据所述特定前三阶频率数据、特定前三阶振型所述实际前三阶频率数据以及所述实际前三阶振型对所述初始模态仿真模型进行训练,获得目标模态仿真模型的步骤,具体包括:
21、确定所述特定前三阶频率数据与实际前三阶频率数据之间的频率误差;
22、在所述频率误差高于预设误差和/或所述特征前三阶振型与实际前三阶振型不一致时,对所述初始模态仿真模型中的模型参数进行调整,获得新的初始模态仿真模型;
23、返回所述基于所述初始模态仿真模型确定所述待检测机器人在预设位姿下的特定前三阶频率数据和特定前三阶振型的步骤,直至新的频率误差低于所述预设误差且新的特征前三阶振型与实际前三阶振型一致,并得到目标模态仿真模型。
24、可选地,所述根据全局位姿下的模态预测模型确定所述各组位姿对应的预测频率数据的步骤,具体包括:
25、通过所述仿真频率数据对高斯过程回归模型进行训练,获得全局位姿下的模态预测模型;
26、将所述待预测机器人在所述各组位姿下的位姿影响因素输入至所述模态预测模型中,获得所述各组位姿对应的预测频率数据。
27、可选地,所述根据所述仿真频率数据和所述预测频率数据对所述模态预测模型进行优化,获得优化后的模态预测模型的步骤,具体包括:
28、将所述仿真频率数据和所述预测频率数据进行对比,获得所述仿真频率数据与所述预测频率数据之间的拟合优度;
29、在所述拟合优度小于或等于预设优度时,对所述模态预测模型进行调优,获得新的模态预测模型;
30、返回所述根据全局位姿下的模态预测模型确定所述各组位姿对应的预测频率数据的步骤,直至所述仿真频率数据与新的预测频率数据之间的新的拟合优度大于所述预设优度,并得到优化后的模态预测模型。
31、此外,为实现上述目的,本发明还提供一种模态预测装置,所述模态预测装置包括:
32、正交试验模块,用于根据待预测机器人的位姿影响因素构建正交试验表,并基于所述正交试验表确定若干组位姿;
33、数据仿真模块,用于根据各组位姿下的各模态仿真模型确定所述各组位姿对应的仿真频率数据;
34、数据预测模块,用于根据全局位姿下的模态预测模型确定所述各组位姿对应的预测频率数据;
35、模态预测模块,用于根据所述仿真频率数据和所述预测频率数据对所述模态预测模型进行优化,获得优化后的模态预测模型。
36、此外,为实现上述目的,本发明还提出一种模态预测设备,所述模态预测设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的模态预测程序,所述模态预测程序配置为实现如上文所述的模态预测方法的步骤。
37、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有模态预测程序,所述模态预测程序被处理器执行时实现如上文所述的模态预测方法的步骤。
38、本发明根据待预测机器人的位姿影响因素构建正交试验表,并基于正交试验表确定若干组位姿,然后根据各组位姿下的各模态仿真模型确定各组位姿对应的仿真频率数据,然后根据全局位姿下的模态预测模型确定各组位姿对应的预测频率数据,再根据仿真频率数据和预测频率数据对模态预测模型进行优化,获得优化后的模态预测模型。本发明基于正交试验表确定若干组不同的位姿,能够减少需要确定的位姿的数量,提高获取不同的位姿下的仿真频率数据和预测频率数据的效率,并根据仿真频率数据和预测频率数据对全局位姿下的模态预测模型进行优化,从而能够通过优化后的模态预测模型对机器人在不同的位姿下的模态数据进行实时有效地预测。
技术特征:
1.一种模态预测方法,其特征在于,所述模态预测方法包括以下步骤:
2.如权利要求1所述的模态预测方法,其特征在于,所述根据待预测机器人的位姿影响因素构建正交试验表,并基于所述正交试验表确定若干组位姿的步骤,具体包括:
3.如权利要求1所述的模态预测方法,其特征在于,所述根据各组位姿下的各模态仿真模型确定所述各组位姿对应的仿真频率数据的步骤,具体包括:
4.如权利要求3所述的模态预测方法,其特征在于,所述对所述初始模态仿真模型进行训练,获得目标模态仿真模型的步骤,具体包括:
5.如权利要求4所述的模态预测方法,其特征在于,所述根据所述特定前三阶频率数据、特定前三阶振型所述实际前三阶频率数据以及所述实际前三阶振型对所述初始模态仿真模型进行训练,获得目标模态仿真模型的步骤,具体包括:
6.如权利要求1所述的模态预测方法,其特征在于,所述根据全局位姿下的模态预测模型确定所述各组位姿对应的预测频率数据的步骤,具体包括:
7.如权利要求1~6中任一项所述的模态预测方法,其特征在于,所述根据所述仿真频率数据和所述预测频率数据对所述模态预测模型进行优化,获得优化后的模态预测模型的步骤,具体包括:
8.一种模态预测装置,其特征在于,所述模态预测装置包括:
9.一种模态预测设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的模态预测程序,所述模态预测程序配置为实现如权利要求1至7中任一项所述的模态预测方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有模态预测程序,所述模态预测程序被处理器执行时实现如权利要求1至7中任一项所述的模态预测方法的步骤。
技术总结
本发明公开了一种模态预测方法、装置、设备及存储介质。本发明根据待预测机器人的位姿影响因素构建正交试验表,并基于正交试验表确定若干组位姿,然后根据各组位姿下的各模态仿真模型确定各组位姿对应的仿真频率数据,然后根据全局位姿下的模态预测模型确定各组位姿对应的预测频率数据,再根据仿真频率数据和预测频率数据对模态预测模型进行优化,获得优化后的模态预测模型。本发明基于正交试验表确定若干组不同的位姿,能够减少需要确定的位姿的数量,并根据仿真频率数据和预测频率数据对全局位姿下的模态预测模型进行优化,从而能够通过优化后的模态预测模型对机器人在不同的位姿下的模态数据进行实时有效地预测。
技术研发人员:任忠涛,李奔,李勇俊,孙健
受保护的技术使用者:苏州汇川控制技术有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!