一种穿梭车柔性化平台建模方法与流程
本发明涉及自动化物流,尤其涉及一种穿梭车柔性化平台建模方法。
背景技术:
1、仓储系统是整个物流企业配送体系的物资和信息中转中心,在一定程度上决定了企业自动化生产的运行效率与成本。穿梭车仓储系统是一种高智能化、高灵活性的密集存储系统,无需提升机即可实现三维实时调度和作业,避免了传统仓储系统设备面积大、运行效率低、灵活性差等缺陷,具有普遍投入实际生产的潜力。
2、在自动化物流系统中,建模是为了方便开发实施人员快速搭建一套与实际场景一致的三维场景,直观地定义物流路径,设计开发柔性化建模平台。通过建模平台不仅可以搭建三维场景,还可以为柔性智能调度系统提供路径、定义基础数据(包括解析协议、控制节点、位置信息和设备关联、设备工作范围等),保证系统能够高效安全的进行交通管理,同时可以通过设置设备运行参数、系统参数等信息,快速估算系统的性能,提高设备利用率、节约运行成本,使系统能够适应不同应用领域、环境和业务需求。
技术实现思路
1、本发明的目的在于:针对现有技术的不足,现提出一种穿梭车柔性化平台建模方法,通过流程和轨道路径的规划建模和调度系统动态解析,使系统能够适应不同应用领域、环境和业务需求,实现了系统整体上具有了柔性的特点;实现安全高效的交通管理,系统需建立合理的地图模型,以便于调度系统的路径表达、规划,区域控制器通过简单的信息按照穿梭车即将要行走的路径完成换层控制。
2、本发明的技术方案如下:
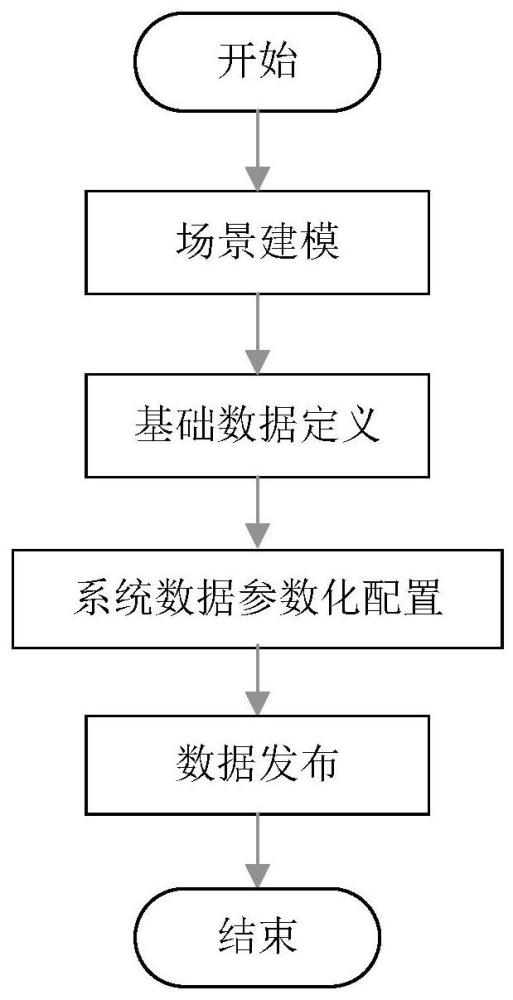
3、本发明公开了一种穿梭车柔性化平台建模方法,包括如下具体步骤:
4、s1、场景建模:搭建三维场景,从项目设备明细表导入设备模型,在场景中添加多个处于不同位置的视角;
5、s2、基础数据定义:根据实际流程和业务需求以及对穿梭车调度系统的动态分析,定义调度系统正常运行所需要的基础数据,包括解析协议信息、控制节点数据、位置信息、路径、设备关联关系和设备工作范围;根据调度系统和穿梭车的通讯协议将连接参数配置成模板,定义控制时选择协议后快速生成连接参数,只需修改ip地址和端口信息;同时定义完控制节点数据后将设备加入控制,自动生成调度系统所需要的设备数据;
6、s3、系统数据参数化配置:动态设置系统任务执行策略、任务执行超时时间和设备工作范围,并配置各个设备作业过程中的参数;在配置任务执行策略时根据项目实际情况或自定义复合策略进行选择;根据项目实际情况定义设备工作范围;
7、s4、通过数据发布功能将定义的数据发布成穿梭车调度系统所需要的数据文件。
8、进一步地,所述步骤s1场景建模包括创建系统、系统下包括仓库、视角和托盘类型;仓库包括至少一个楼层,每个楼层包括至少一个区域,每个区域内根据实际情况创建地板、货架、设备以及路径,每个路径下创建路径节点。
9、以上方法,场景下可以添加多个处于不同位置的观察者(即工具中的视角),以实现不同视角的切换。基于三维空间的场景构建,解决了平面监控中无法实现的分层展现问题,使得监控能够真实反映楼层、区域、设备的物理位置。动态设置系统任务执行策略、任务执行超时时间、设备工作范围,并配置各个设备作业过程中的参数,如移动速度、加速度等,使系统在整体上具有柔性。
10、进一步地,所述场景建模包括对设备的点选、框选、移动、复制、对齐和等大的设置,配合缩放、平移和旋转方法搭建与实际一致的三维监控场景。
11、进一步地,所述步骤s2中基础数据定义的具体步骤为:
12、s2.1、定义解析协议,根据通讯协议定义解析协议信息,包括穿梭车控制系统与设备间的通信协议的解析和转换规则;
13、s2.2、定义控制,定义控制类、协议类以及穿梭车控制系统与穿梭车之间的连接方式、连接参数等,并根据实际业务需求配置系统执行任务时使用的策略;s2.3、定义位置,为穿梭车调度系统提供货位信息和设备位置信息;
14、s2.4、定义路径,根据项目实际需求,分析业务流程定义路径;
15、s2.5、定义设备关联,将穿梭车分别与取货站台、卸货站台和换层提升机进行关联;
16、s2.6、定义设备作业范围,定义穿梭车的作业范围,限定穿梭车可以工作的巷道和层。
17、进一步地,所述步骤s2.3中货位信息为根据添加的货架模型中填写的巷道数、排数、列数、层数和深度信息自动生成货位以及根据巷道口和巷道层调度系统执行出入库任务需要的位置信息。
18、进一步地,所述步骤s2.3中设备位置信息根据场景中定义的穿梭车、换层提升机和取卸货站台设备自动生成对应的位置信息。
19、进一步地,所述货位信息按巷道数三位+左右排数一位+列数三位+层数三位+深度三位进行编码。
20、进一步地,所述步骤s2.4中定义路径包括穿梭车入库路径和穿梭车出库路径,所述穿梭车入库路径为取货站台到货位,定义取货站台到对应巷道层的所有货位;所述穿梭车出库路径为货位到卸货站台。
21、进一步地,所述步骤s4中数据发布时根据选择的服务器数据库类型生成对应的数据文件供穿梭车调度系统使用。
22、与现有的技术相比本发明的有益效果是:
23、本发明采用3d展现技术实现项目三维场景的快速搭建。基于三维空间的场景,解决了平面监控中无法实现的分层展现问题,使得监控能够真实反映楼层、区域、设备的物理位置。以自主的类指令语言系统作为流程建模工具,通过流程和轨道路径的规划建模和调度系统动态解析,使系统整体上具有了柔性;通过配置穿梭车关联设备、穿梭车作业范围等信息为系统完成穿梭车换层控制提供有效数据;通过设置设备运行参数、系统参数、任务策略等信息,快速估算系统的性能,提高设备利用率、节约运行成本,使系统能够适应不同应用领域、环境和业务需求。
技术特征:
1.一种穿梭车柔性化平台建模方法,其特征在于,包括如下具体步骤:
2.根据权利要求1所述的一种穿梭车柔性化平台建模方法,其特征在于,所述步骤s1场景建模包括创建系统、系统下包括仓库、视角和托盘类型;仓库包括至少一个楼层,每个楼层包括至少一个区域,每个区域内根据实际情况创建地板、货架、设备以及路径,每个路径下创建路径节点。
3.根据权利要求2所述的一种穿梭车柔性化平台建模方法,其特征在于,所述场景建模包括对设备的点选、框选、移动、复制、对齐和等大的设置,配合缩放、平移和旋转方法搭建与实际一致的三维监控场景。
4.根据权利要求1所述的一种穿梭车柔性化平台建模方法,其特征在于,所述步骤s2中基础数据定义的具体步骤为:
5.根据权利要求4所述的一种穿梭车柔性化平台建模方法,其特征在于,所述步骤s2.3中货位信息为根据添加的货架模型中填写的巷道数、排数、列数、层数和深度信息自动生成货位以及根据巷道口和巷道层调度系统执行出入库任务需要的位置信息。
6.根据权利要求4所述的一种穿梭车柔性化平台建模方法,其特征在于,所述步骤s2.3中设备位置信息根据场景中定义的穿梭车、换层提升机和取卸货站台设备自动生成对应的位置信息。
7.根据权利要求5所述的一种穿梭车柔性化平台建模方法,其特征在于,所述货位信息按巷道数三位+左右排数一位+列数三位+层数三位+深度三位进行编码。
8.根据权利要求4所述的一种穿梭车柔性化平台建模方法,其特征在于,所述步骤s2.4中定义路径包括穿梭车入库路径和穿梭车出库路径,所述穿梭车入库路径为取货站台到货位,定义取货站台到对应巷道层的所有货位;所述穿梭车出库路径为货位到卸货站台。
9.根据权利要求1所述的一种穿梭车柔性化平台建模方法,其特征在于,所述步骤s4中数据发布时根据选择的服务器数据库类型生成对应的数据文件供穿梭车调度系统使用。
技术总结
本发明公开一种穿梭车柔性化平台建模方法,包括如下具体步骤:S1、场景建模:搭建三维场景,在场景中添加多个处于不同位置的视角;S2、基础数据定义:根据实际流程和业务需求以及对穿梭车调度系统的动态分析,定义调度系统正常运行所需要的基础数据;S3、系统数据参数化配置:动态设置系统任务执行策略、任务执行超时时间和设备工作范围;S4、通过数据发布功能将定义的数据发布成穿梭车调度系统所需要的数据文件。本发明为柔性智能调度提供路径、基础数据和运行参数模型,以自主的类指令语言系统作为流程建模工具,通过流程和轨道路径的规划建模和调度系统动态解析,使系统能够适应不同应用领域、环境和业务需求。
技术研发人员:段双艳,徐元飞,刘佳喜,李全梁,颜韬,时国栋
受保护的技术使用者:昆船智能技术股份有限公司
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!