绳系小行星探测系统的动力学建模与稳定性分析方法
本发明涉及深空探测,具体涉及一种绳系小行星探测系统的动力学建模与稳定性分析方法。
背景技术:
1、小行星系留探测是一种新型的环绕探测方式,探测器与小行星伴飞并通过柔性绳索与小行星连接,类似于绳系卫星。探测器可实现长期对小行星的伴飞/驻留探测,具有拓扑构型稳定、观测条件好、无燃料消耗等优点,为小行星表面采样、探测器辅助着陆、机器人着陆和附着等任务提供了一种可行性高的途径,是一种极具潜力的小行星原位探测方式。
2、绳系小行星探测系统具有广阔的应用前景。系绳与小行星连接后,在系绳的作用下可实现对小行星的近距离探测,同时也可用于小行星等大型捕获目标的变轨或消旋。此外,绳系小行星探测系统还可用于辅助着陆。由于小行星引力场微弱,小行星探测器着陆时极容易发生反弹。可以通过绳索先将探测器与小行星相连,然后回收绳索,使探测器接近小行星并实现着陆,如“罗塞塔”彗星探测器。
3、探测器与小行星组成的系留系统中,小行星对探测器的引力不可忽略。此外,小行星一般存在一定的自旋运动,对探测器的运动、系绳的动力学特征将产生较大的影响。在研究小行星系留系统动力学和稳定性的研究中,系绳大多被简化为无质量刚性杆,忽略了小行星引力场对系统中系绳的影响,影响系留系统动力学响应分析与稳定性。且实际探测器进行系留小行星时,系绳长度可达几公里,其质量也不应忽略。因此,开展绳系小行星探测系统的多柔体动力学建模与稳定性分析对小行星抵近探测以及采样任务等具有重要意义和价值。
技术实现思路
1、本发明目的是提供一种在不规则小行星附近引力场中运行的系绳探测器的动力学建模与稳定性分析方法,用于分析探测器在初始条件下的动力学响应,准确获取探测器稳定运行的可行域,精确分析系绳质量、弹性和张力对探测器系留稳定性的影响,为绳系小行星探测系统的工程实现提供理论支撑。
2、为解决上述技术问题,本发明采用的技术方案如下:
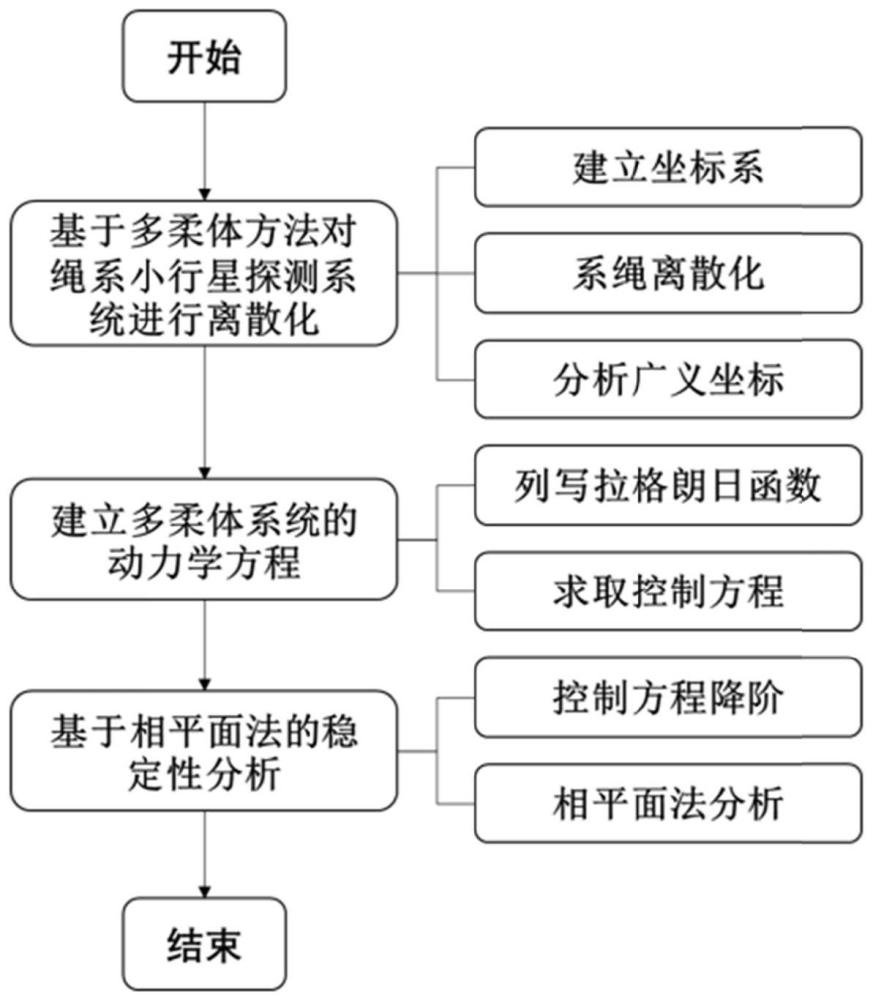
3、一种绳系小行星探测系统的动力学建模与稳定性分析方法,该方法包括以下步骤:
4、s1,基于多柔体方法对绳系小行星探测系统进行离散化;
5、所述绳系小行星探测系统的系统组成包括小行星、绳系小行星探测器和柔性系绳;
6、根据绳系小行星探测系统的系统组成,建立描述绳系小行星探测器和柔性系绳运动的坐标系,将探测器-系绳系统离散为多柔体模型,分析用于描述探测器运动的广义坐标;
7、s2,基于耗散系统的第二类拉格朗日方程建立多柔体系统的动力学方程;
8、采用面外角β作为广义坐标描述探测器的运动,采用系绳长度li(i=1,2,…,n)作为广义坐标描述系绳节点i的运动,其中i=1,2,…,n表示系绳节点编号,n为系绳的总节点数量;
9、绳系小行星探测器运动的动力学方程为:
10、
11、式中,mk表示系绳中节点k的质量,li表示第i段系绳的长度,ii表示第i段系绳的长度变化率,σ2和σ3为中间变量,表达式分别为σ2=rlxωcos(λ+β)+rlyωsin(λ+β)和其中β表示面外角,表示面外角变化率,表示面外角的角加速度,ω表示小行星自转角速度,λ表示锚点纬度,rlx和rly分别表示小行星质心到锚点在x和y方向上的距离,和分别表示节点k所受到的小行星引力加速度在x和y方向上的分量;
12、柔性系绳中节点的动力学方程为
13、
14、式中,k表示系绳等效刚度,cdj表示第j段系绳等效阻尼系数,lj0表示第j段系绳的初始长度,σ1为中间变量,表达式为σ1=rlxωsin(λ+β)-rlyωcos(λ+β),表示第i段系绳的长度变化率的导数;
15、由探测器运动的动力学方程和系绳中节点的动力学方程共同构成了绳系小行星探测系统的多柔体动力学方程;
16、s3,基于相平面法进行系统的稳定性分析;
17、基于相平面图分析面外角β以及面外角变化率的取值对系留系统稳定性的影响,探测器的稳定域为初始条件下面外角和面外角变化率应满足的条件;
18、首先,选定柔性系绳的分段数量与材质,得到参数系绳等效刚度k、系绳的总节点数量n和系绳各节点的质量,并代入绳系小行星探测系统的多柔体动力学方程;然后将绳系小行星探测系统的多柔体动力学方程进行降阶,得到降阶后的一阶微分方程组;再次,给定面外角β以及面外角变化率的取值范围,以处于所述面外角β以及面外角变化率的取值范围内的值作为初值并基于降阶后的一阶微分方程组进行仿真计算,得到某初值下面外角以及面外角变化率的动力学响应曲线,并将所述动力学响应曲线绘制在xy平面上,得到相轨迹;最后,根据相轨迹分析某初值下的系统稳定性,获得使探测器保持稳定的可行域。
19、进一步的,探测器在质心固连坐标系中的三维坐标由锚点经度锚点纬度λ、面内角α、面外角β和系绳长度l五个独立坐标完全确定。
20、进一步的,步骤s1中,柔性系绳被离散为n段并形成n个节点,且每段系绳的质量均匀分布在各节点上,节点与节点之间连接的模型采用无质量弹簧与阻尼器模型,每个节点受到弹力和阻尼力的作用。
21、进一步的,步骤s3中,认为系绳不可伸长,每段系绳的长度变化率段以及每段系绳长度变化率的导数均为零。
22、进一步的,步骤s3中,采用四阶龙格-库塔法对降阶后的一阶微分方程组进行仿真计算。
23、和现有技术相比,本发明取得的有益效果如下:
24、1)利用本发明所提出的绳系小行星探测系统的动力学建模与稳定性分析方法,可以精确分析系绳质量、长度、弹性及绳内张力等因素对探测器系留稳定性的影响,具体包括这些因素对探测器的动力学特性、引力平衡点的位置等的影响;
25、2)本发明对于使用绳系的小行星抵近探测以及采样任务等应用研究具有重要意义。与传统的无质量刚性杆假设相比,系绳视为含质量与阻尼的弹性拉索,仅能承受张力,在此假设条件下得到的探测器系统多柔体动力学模型可以准确地反应系统的动力学特性,准确获取探测器稳定运动的可行域,为绳系小行星探测任务的工程实施奠定理论基础。
技术特征:
1.一种绳系小行星探测系统的动力学建模与稳定性分析方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的绳系小行星探测系统的动力学建模与稳定性分析方法,其特征在于,所述探测器在质心固连坐标系中的三维坐标由锚点经度锚点纬度λ、面内角α、面外角β和系绳长度l五个独立坐标确定。
3.根据权利要求1所述的绳系小行星探测系统的动力学建模与稳定性分析方法,其特征在于,所述步骤s1中,所述柔性系绳被离散为n段并形成n个节点,且每段系绳的质量均匀分布在各节点上,节点与节点之间连接的模型采用无质量弹簧与阻尼器模型,每个节点受到弹力和阻尼力的作用。
4.根据权利要求1所述的绳系小行星探测系统的动力学建模与稳定性分析方法,其特征在于,所述步骤s3中,基于相平面法进行系统的稳定性分析时,配置使得系绳不可伸长,每段系绳的长度变化率段以及每段系绳长度变化率的导数均为零。
5.根据权利要求1~4中任意一项所述的绳系小行星探测系统的动力学建模与稳定性分析方法,其特征在于,所述步骤s3中,采用四阶龙格-库塔法对降阶后的一阶微分方程组进行仿真计算。
技术总结
本发明公开了一种绳系小行星探测系统的动力学建模与稳定性分析方法,涉及深空探测技术领域。本发明所述方法针对一种在不规则小行星附近引力场中运行的系绳探测器提出,包括S1基于多柔体方法对绳系小行星探测系统离散化、S2利用耗散系统的第二类拉格朗日方程建立多柔体系统的动力学方程、S3基于相平面法进行稳定性分析等步骤。本发明所述方法可用于分析系绳探测器在初始条件下的动力学响应,准确获取系绳探测器稳定运行的可行域,并能够精确分析系绳质量、弹性和张力对探测器系留稳定性的影响,从而可为绳系小行星探测系统的工程实现提供理论支撑。
技术研发人员:王杰,张涛,刘望
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!