汽车零部件缺陷检测方法、系统、计算机及存储介质与流程
本发明属于车检测,具体地涉及汽车零部件缺陷检测方法、系统、计算机及存储介质。
背景技术:
1、随着人们生活水平的提高,人们对汽车的消费也越来越多,汽车零部件的这个市场变得也越来越大。汽车零部件是构成汽车整体的各个单元及服务于汽车的一种产品。汽车零部件的种类繁多,近些年来汽车零部件制造厂也在飞速地发展。在汽车零部件的生产加工中,对汽车零部件进行表面缺陷检测是必不可少的一道工序。
2、目前是主要通过视觉扫描检测仪对汽车零部件进行扫描检测以判定其表面缺陷状况,但是现有的扫描检测仪无法排除检测环境的影响,导致检测效果不佳。
技术实现思路
1、为了解决上述技术问题,本发明提供了汽车零部件缺陷检测方法、系统、计算机及存储介质系统,用于解决现有的扫描检测仪无法排除检测环境的影响,导致检测效果不佳的技术问题。
2、一方面,该发明提供以下技术方案,一种汽车零部件缺陷检测方法,所述方法包括:
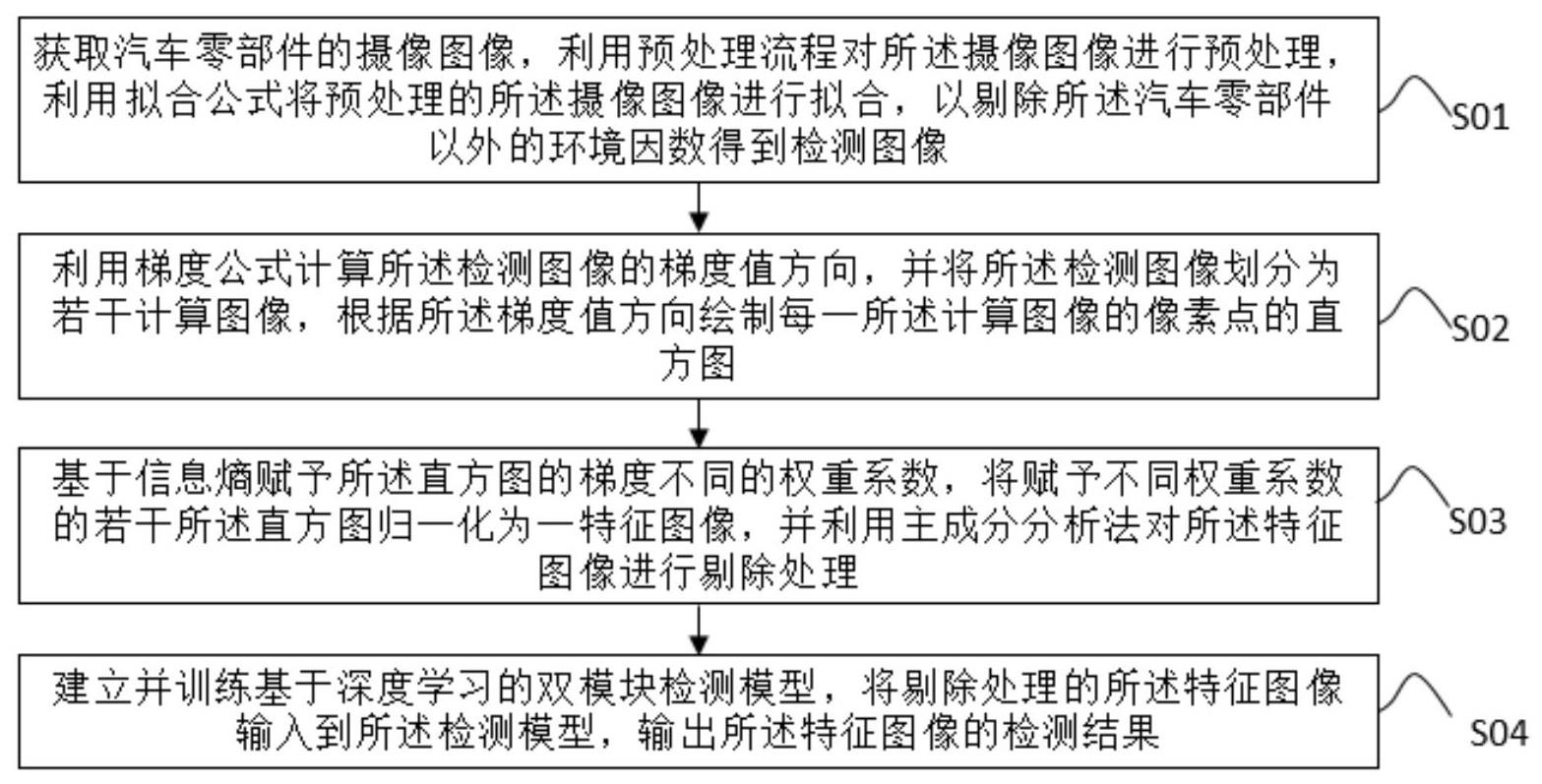
3、获取汽车零部件的摄像图像,利用预处理流程对所述摄像图像进行预处理,利用拟合公式将预处理的所述摄像图像进行拟合,以剔除所述汽车零部件以外的环境因数得到检测图像;
4、利用梯度公式计算所述检测图像的梯度值方向,并将所述检测图像划分为若干计算图像,根据所述梯度值方向绘制每一所述计算图像的像素点的直方图;
5、基于信息熵赋予所述直方图的梯度不同的权重系数,将赋予不同权重系数的若干所述直方图归一化为一特征图像,并利用主成分分析法对所述特征图像进行剔除处理;
6、建立并训练基于深度学习的双模块检测模型,将剔除处理的所述特征图像输入到所述检测模型,输出所述特征图像的检测结果。
7、相比现有技术,本申请的有益效果为:通过拟合公式对图像的进行拟合,以剔除所述汽车零部件以外的环境因数,得到检测图像,使除汽车零部件外其他环境类的图像被排除,提高检测的准确度。
8、进一步的,利用拟合公式将预处理的所述摄像图像进行拟合,以剔除所述汽车零部件以外的环境因数得到检测图像的步骤之前,所述方法还包括:
9、利用canny算子对所述摄像图像中的边缘信息进行检测,获得所述汽车零部件的边缘信息;
10、计算所述汽车零部件边缘信息的圆度,判断所述圆度是否大于第一阈值,若所述圆度小于所述第一阈值,则将所述汽车零部件边缘信息排除。
11、进一步的,所述拟合公式为:
12、
13、式中,,,,,分别表示为检测图像的坐标,表示为(1,2,3…n),表示为圆的圆心,表示为圆的半径,表示为关于变量x,y,z的函数m。
14、进一步的,主成分分析法的步骤包括:
15、获取所述特征图像的协方差矩阵,并对所述协方差矩阵对角化运算;
16、提取运算后所述协方差矩阵对角线上的向量值,并以所述向量值构成所述特征图像的特征向量。
17、进一步的,所述梯度公式包括:
18、
19、式中,表示为图像的像素点()的水平方向像素值变化,表示为图像的像素点()的垂直方向像素值变化,表示为图像的像素点()的梯度值的方向。
20、进一步的,将剔除处理的所述特征图像输入到所述检测模型,输出所述特征图像的检测结果的步骤还包括:
21、若所述判断值小于第二阈值,则将所述判断值依次输入所述卷积神经网络、所述随机丢失网络及所述前馈神经网络中,输出一预测结果。
22、进一步的,获取汽车零部件的摄像图像的步骤包括:
23、在待采集汽车零部件的一侧设置摄像机及若干补光灯,其中若干所述补光灯环形阵列设于所述摄像机的外侧;
24、所述摄像机获取汽车零部件视频图像,间隔预设时间截取所述视频图像中的一帧图像,将相邻时间内的两帧图像进行差分运算,以获得所述摄像图像。
25、第二方面,该发明提供以下技术方案,所述汽车零部件缺陷检测系统包括:
26、拟合模块,用于获取汽车零部件的摄像图像,利用预处理流程对所述摄像图像进行预处理,利用拟合公式将预处理的所述摄像图像进行拟合,以剔除所述汽车零部件以外的环境因数得到检测图像;
27、计算模块,用于利用梯度公式计算所述检测图像的梯度值方向,并将所述检测图像划分为若干计算图像,根据所述梯度值方向绘制每一所述计算图像的像素点的直方图;
28、剔除模块,用于基于信息熵赋予所述直方图的梯度不同的权重系数,将赋予不同权重系数的若干所述直方图归一化为一特征图像,并利用主成分分析法对所述特征图像进行剔除处理;
29、检测模块,用于建立并训练基于深度学习的双模块检测模型,将剔除处理的所述特征图像输入到所述检测模型,输出所述特征图像的检测结果,其中,所述双模块包括检测模块和预测模块,所述检测模块包括自编码器及损失函数,所述预测模块包括卷积神经网络、随机丢失网络及前馈神经网络;将剔除处理的所述特征图像输入到所述检测模型,输出所述特征图像的检测结果的步骤包括:将所述特征图像输入到所述自编码器内进行重构,重构后的特征图像与所述特征图像一同输入到所述损失函数中,输出一判断值;判断所述判断值是否大于第二阈值,若所述判断值大于第二阈值,则输出所述特征图像有故障。
30、第三方面,该发明提供以下技术方案,一种计算机,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述的汽车零部件缺陷检测方法。
31、第四方面,该发明提供以下技术方案,一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述的汽车零部件缺陷检测方法。
技术特征:
1.一种汽车零部件缺陷检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的汽车零部件缺陷检测方法,其特征在于,利用拟合公式将预处理的所述摄像图像进行拟合,以剔除所述汽车零部件以外的环境因数得到检测图像的步骤之前,所述方法还包括:
3.根据权利要求1所述的汽车零部件缺陷检测方法,其特征在于,所述拟合公式为:
4.根据权利要求1所述的汽车零部件缺陷检测方法,其特征在于,主成分分析法的步骤包括:
5.根据权利要求1所述的汽车零部件缺陷检测方法,其特征在于,所述梯度公式包括:
6.根据权利要求1所述的汽车零部件缺陷检测方法,其特征在于,
7.根据权利要求1所述的汽车零部件缺陷检测方法,其特征在于,获取汽车零部件的摄像图像的步骤包括:
8.一种汽车零部件缺陷检测系统,其特征在于,
9.一种计算机,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的汽车零部件缺陷检测方法。
10.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的汽车零部件缺陷检测方法。
技术总结
本发明提供了一种汽车零部件缺陷检测方法、系统、计算机及存储介质,所述方法包括获取汽车零部件的摄像图像,利用预处理流程对所述摄像图像进行预处理,利用拟合公式将预处理的所述摄像图像进行拟合,以剔除所述汽车零部件以外的环境因数得到检测图像;利用梯度公式计算所述检测图像的梯度值方向,并将所述检测图像划分为若干计算图像,根据所述梯度值方向绘制每一所述计算图像的像素点的直方图;基于信息熵赋予所述直方图的梯度不同的权重系数,将赋予不同权重系数的若干所述直方图归一化为一特征图像,建立并训练基于深度学习的双模块检测模型,将剔除处理的所述特征图像输入到所述检测模型,输出所述特征图像的检测结果,提高检测的准确度。
技术研发人员:万见,涂子文,刘志坚,金飞,李文祥,朱志豪,陈松
受保护的技术使用者:南昌江铃华翔汽车零部件有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!