一种X光安检设备的危险物品自动识别方法与流程
本发明涉及自动识别,尤其涉及一种x光安检设备的危险物品自动识别方法。
背景技术:
1、传统的安检机目标检测方法需要前端和后端的配合,涉及到图像的传输、处理和反馈等多个环节,最终还需要把目标检测功能集成到扫描软件当中,这无疑增加了系统的复杂性,影响了目标检测的效率,并且对运行环境的要求比较高,需要配置高性能的计算机设备才能运行,对于没有nvidia显卡的电脑来说,无法运行某些基于gpu的计算模型。
技术实现思路
1、本发明的目的在于提供一种x光安检设备的危险物品自动识别方法,具备检测效率高的优点,解决了传统安检设备需要配置高性能计算机的问题。
2、根据本发明实施例的一种x光安检设备的危险物品自动识别方法,包括以下步骤:
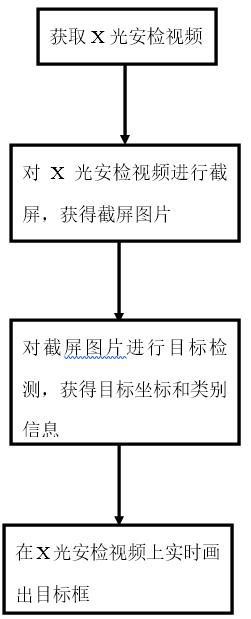
3、s1、获得x光安检视频,并在显示设备上进行显示;
4、s2、使用python的mss库对显示设备的屏幕指定区域进行截屏,获得截屏图像数据流;
5、s3、将上述s2步骤中截屏图片数据送入yolov5算法,通过yolov5算法中的自定义模型进行检测,获得目标框的坐标和类别信息;
6、s4、从yolov5模型的输出中,读取目标框的坐标信息,使用tkinter和canvas在x光安检视频的显示设备上实时画出坐标信息相对应的目标框。
7、进一步的,步骤s3中的yolov5算法中的自定义模型的生成包括以下步骤:
8、准备对照样本数据集:采集包含违禁物的包裹或人体的x光透视图像;
9、将对照样本数据集中的样本图像进行人工标注,人工标注是将样本图像中的违禁物使用矩形框框选,并标注框选的特征类别,将人工标注后的样本画像生成.xml文件,.xml文件及与之对应的样本图像存储为yolov预训练样本对照数据集;
10、利用上述步骤中得到的样本对照数据集,在yolov5s预训练模型基础上进行训练,获得自定义模型。
11、进一步的,所述违禁物品包括刀具、枪、剪刀、钳子、扳手、锤子中的一种或多种。
12、进一步的,所述.xml文件中包括图像名称、图像存储位置、矩形框的坐标,人工标注的矩形框按左上角点的横坐标以及矩形框右下角的横纵坐标定位保存。
13、本发明与现有技术相比具有的有益效果是:本发明通过自动化截屏和目标检测,可以大幅提高x光安检违禁物品的检测速度;通过将所有目标检测步骤进行集成,省去了前后端的对接过程,简化了系统结构。降低了硬件的要求,可以在没有nvidia显卡的电脑上运行。
技术特征:
1.一种x光安检设备的危险物品自动识别方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种x光安检设备的危险物品自动识别方法,其特征在于:步骤s3中的yolov5算法中的自定义模型的生成包括以下步骤:
3.根据权利要求1所述的一种x光安检设备的危险物品自动识别方法,其特征在于:所述违禁物品包括刀具、枪、剪刀、钳子、扳手、锤子中的一种或多种。
4.根据权利要求2所述的一种x光安检设备的危险物品自动识别方法,其特征在于:所述.xml文件中包括图像名称、图像存储位置、矩形框的坐标,人工标注的矩形框按左上角点的横坐标以及矩形框右下角的横纵坐标定位保存。
技术总结
本发明公开了一种X光安检设备的危险物品自动识别方法,包括以下步骤:S1、获得X光安检视频,并在显示设备上进行显示;S2、使用python的MSS库对显示设备的屏幕指定区域进行截屏,获得截屏图像数据流;S3、通过YOLOv5算法中的自定义模型进行检测,获得目标框的坐标和类别信息。S4、从YOLOv5模型的输出中,读取目标框的坐标信息,使用Tkinter和Canvas在X光安检视频的显示设备上实时画出坐标信息相对应的目标框。本发明通过自动化截屏和目标检测,可以大幅提高X光安检违禁物品的检测速度;通过将所有目标检测步骤进行集成,省去了前后端的对接过程,简化了系统结构。降低了硬件的要求,可以在没有NVIDIA显卡的电脑上运行。
技术研发人员:赵群礼,夏国平,袁翔
受保护的技术使用者:安徽启路达光电科技有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!