一种密集堆叠场景下的机器人目标抓取检测方法
本发明涉及图像处理领域,尤其涉及一种密集堆叠场景下的机器人目标抓取检测方法。
背景技术:
1、机器人目标抓取涉及环境感知、抓取检测和运动控制等诸多难点,特别是堆叠目标抓取对机器人来说极具挑战性的任务。现有目标抓取研究方法优点参差不齐,堆叠场景下的目标抓取效果差强人意,机器人抓取方法性能还有很大的提升空间。
技术实现思路
1、为了解决上述问题,本发明提出了一种密集堆叠场景下的机器人目标抓取检测方法。
2、具体方案如下:
3、一种密集堆叠场景下的机器人目标抓取检测方法,包括:构建抓取检测模型,通过训练集对模型进行训练,通过训练后的模型进行抓取检测;
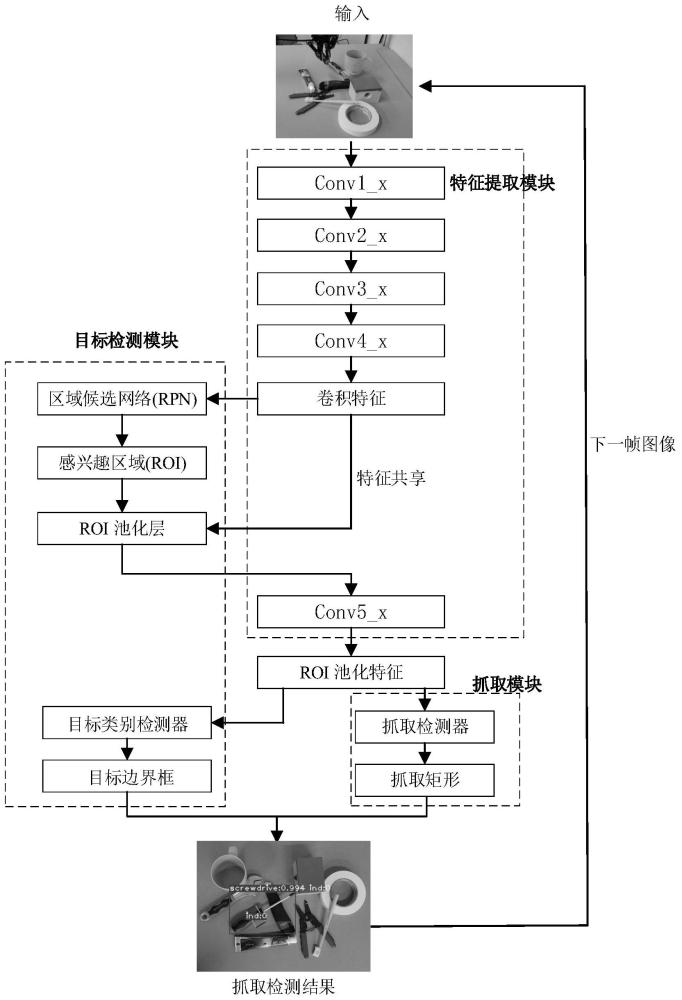
4、模型包括特征提取模块、目标检测模块和抓取模块;
5、特征提取模块中包括五个卷积子模块,其中,前四个卷积子模块采用端到端串联方式链接;第四个卷积子模块输出的卷积特征图一方面输入至目标检测模块的rpn网络中,另一方面通过特征共享输入至目标检测模块的roi池化层中,而rpn网络输出得到的roi区域作为roi池化层的另一个输入;roi池化层的输出作为第五个卷子模块的输入,第五个卷子模块输出roi池化特征;
6、目标检测模块中包括rpn网络、roi池化层和目标类别检测器;rpn网络输出的roi区域输入roi池化层,与特征提取模块中第五个卷积子模块共同将roi特征组合成roi池化特征;roi池化特征输入目标类别检测器后,输出分类结果;
7、抓取模块由抓取检测器组成,抓取检测器的输入为roi池化特征,抓取检测器以一个由3个卷积层组成的残差块作为roi池化特征的检测头。
8、进一步的,抓取检测模型对应的目标函数为:
9、
10、其中,i表示输入图像,g*表示物体的最佳抓取,q表示抓取置信度,g={g1,g2,...,gn}表示所有抓取组成的向量,i∈[1,n]表示物体的抓取个数,gi表示物体的第i个抓取,gi={x,y,h,w,θ,cls},其中,(x,y)表示抓取矩形框中心位置的图像坐标,h和w分别表示抓取矩形框的长和宽,θ表示抓取矩形框相对水平轴的夹角,cls表示抓取物体的类别,prob(.)表示求概率,s表示第s类目标。
11、进一步的,rpn网络中包含三个卷积核大小为3×3的卷积层,分别为中间卷积层、roi区域回归器和roi区域检测器,且roi区域回归器和roi区域检测器同时与中间卷积层级联,输出图像的roi区域。
12、进一步的,目标类别检测器包括由9个卷积层组成的残差块,该残差块作为roi池化特征的检测头。
13、进一步的,抓取检测器执行以下步骤:
14、抓取检测器将每个roi拆分成w×h个网格单元,每个网格单元对应roi池化特征图上的一个像素,抓取检测器在每个网格单元上以定向锚框作为先验,输出候选抓取框;w和h分别表示roi的宽和高包括的网格单元数量;
15、抓取检测器在每个滑动窗口位置生成多个抓取建议,用k来表示最大抓取建议数,回归层输出5k个元素,用于编码k个抓取建议的坐标;
16、抓取分类器提供2k个置信度分数,分别表示锚框可抓取和不可抓取的概率;对于每个roi,抓取检测器将预测w×h×k个候选抓取。
17、进一步的,模型的总损失由目标检测损失lod和抓取检测损失lgd两部分组成;
18、目标检测损失lod的计算公式为:
19、
20、其中,ncls表示训练rpn的一个批次样本的锚框数,i表示第i个锚框,nreg表示训练目标回归器的正样本数,p(i)表示第i个锚框被正确分类的概率,r(i)和分别表示第i个锚框预测的roi和真实roi标签,系数α用于平衡目标分类和回归损失;smoothl1(.)表示smooth l1损失函数;
21、抓取检测损失lgd的计算公式为:
22、
23、其中,ng表示训练抓取检测器roi上的抓取锚框数,npos和nneg分别表示抓取正样本和负样本数,和分别表示第i个锚框被分类为“可抓取”和“不可抓取”的概率,g(i)和分别表示第i个锚框预测的抓取和真实抓取标签,系数β用于平衡抓取检测和回归损失。
24、本发明采用如上技术方案,实现了机器人密集堆叠抓取检测任务,既能够实现多目标类别检测,又能实现目标抓取位置的精确检测。
技术特征:
1.一种密集堆叠场景下的机器人目标抓取检测方法,其特征在于,包括:构建抓取检测模型,通过训练集对模型进行训练,通过训练后的模型进行抓取检测;
2.根据权利要求1所述的密集堆叠场景下的机器人目标抓取检测方法,其特征在于:抓取检测模型对应的目标函数为:
3.根据权利要求1所述的密集堆叠场景下的机器人目标抓取检测方法,其特征在于:rpn网络中包含三个卷积核大小为3×3的卷积层,分别为中间卷积层、roi区域回归器和roi区域检测器,且roi区域回归器和roi区域检测器同时与中间卷积层级联,输出图像的roi区域。
4.根据权利要求1所述的密集堆叠场景下的机器人目标抓取检测方法,其特征在于:目标类别检测器包括由9个卷积层组成的残差块,该残差块作为roi池化特征的检测头。
5.根据权利要求1所述的密集堆叠场景下的机器人目标抓取检测方法,其特征在于:抓取检测器执行以下步骤:
6.根据权利要求1所述的密集堆叠场景下的机器人目标抓取检测方法,其特征在于:模型的总损失由目标检测损失lod和抓取检测损失lgd两部分组成;
技术总结
本发明涉及一种密集堆叠场景下的机器人目标抓取检测方法,包括:构建抓取检测模型,通过训练集对模型进行训练,通过训练后的模型进行抓取检测;模型包括特征提取模块、目标检测模块和抓取模块;特征提取模块用于目标特征提取,目标检测模块用于目标类别检测,抓取模块用于目标的抓取检测。本发明实现了机器人密集堆叠抓取检测任务,既能够实现多目标类别检测,又能实现目标抓取位置的精确检测。
技术研发人员:仲训杲,赵晶,龚涛,苗春晓,关健生,杨贵志
受保护的技术使用者:厦门理工学院
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!