用于汽车智能驾驶系统的预期功能安全分析方法和系统与流程
本发明属于道路汽车预期功能安全,特别涉及用于汽车智能驾驶系统的预期功能安全分析方法和系统。
背景技术:
1、随着道路车辆智能网联的发展,汽车安全领域成为其中一个热门概念。在安全领域中,功能安全、信息安全、预期功能安全也成为人们越来越关注的方面。目前的汽车功能安全标准中,新增了重型汽车功能安全的相关内容,避免由电子电气系统的异常行为引起的危害带来不合理的风险。作为功能安全的补充,预期功能安全旨在解决因设计不足或性能局限引起的危害带来不合理的风险。
2、在重型汽车方面,由于它不同于乘用车的特殊性,在安全方面十分值得注意,并且智能驾驶系统在其中的渗透率逐年递增,高级别自动驾驶越来越受关注,所以安全显得格外重要。智能驾驶整体功能主要依靠传感器、控制器、执行器共同作用,进行预期功能安全活动的目标是保证不存在由于影响智能驾驶系统某些行为的性能局限或合理可预见的人为误用导致的不合理的风险。预期功能安全领域目前处于初始发展阶段。由于自动驾驶领域仅仅满足功能安全并不能完全满足实际场景中的多样性和未知性需求。
技术实现思路
1、为了解决上述技术问题,本发明提出了用于汽车智能驾驶系统的预期功能安全分析方法和系统,通过分析可能发生的危害事件并采取相应的安全措施,尽可能地避免商用车在道路行驶的过程中因设计定义不足和性能局限引起的危害而导致不合理的风险,增加车辆的安全性与可靠性。
2、为实现上述目的,本发明采用以下技术方案:
3、用于汽车智能驾驶系统的预期功能安全分析方法,包括以下步骤:
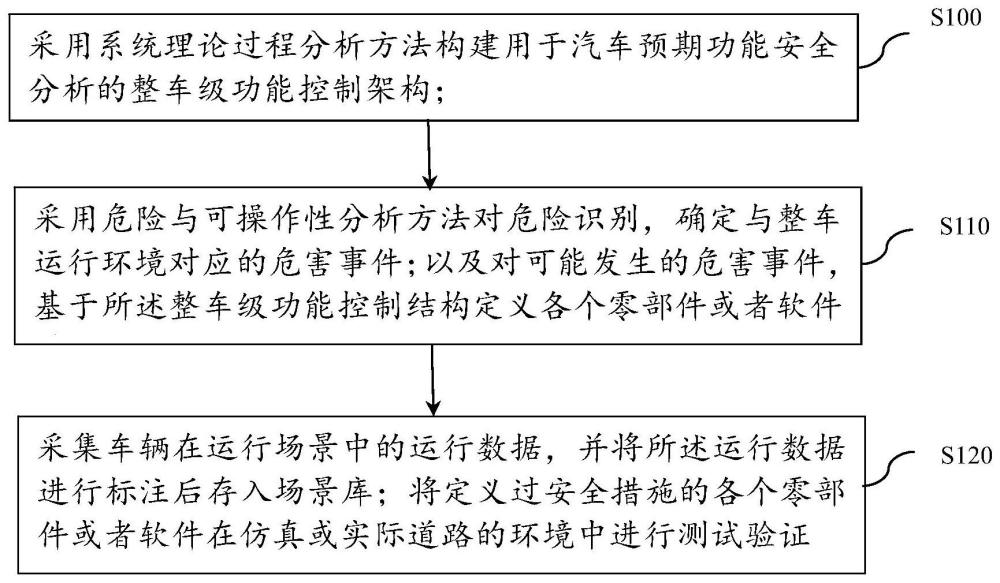
4、采用系统理论过程分析方法构建用于汽车预期功能安全分析的整车级功能控制架构;
5、采用危险与可操作性分析方法对危险识别,确定与整车运行环境对应的危害事件;以及对可能发生的危害事件,基于所述整车级功能控制结构定义各个零部件或者软件对应的安全措施;
6、采集车辆在运行场景中的运行数据,并将所述运行数据进行标注后存入场景库;将定义过安全措施的各个零部件或者软件在仿真或实际道路的环境中进行测试验证。
7、进一步的,所述采用系统理论过程分析方法构建用于汽车预期功能安全分析的整车级功能控制架构具体为:
8、确定整车级功能控制架构中各零部件的组成和各零部件的功能;
9、描述所述整车级功能控制架构的运行设计范围、控制车辆运行的权限、功能激活或关闭的条件及各个运行状态间的转换条件、与外部之间的交互、报警策略、接管的条件和功能降级的方案。
10、进一步的,所述整车级功能控制架构的工作过程包括:开启智能驾驶系统后车辆的信息与雷达摄像头感知到的信息会在感知模块中进行融合处理,结果输出给智能驾驶系统平台,智能驾驶系统平台处理后输出车辆的控制信息结果,发动机制动系统接收到控制信号执行相应动作,同时整车控制平台继续将车辆信息传递,形成数据闭环。
11、进一步的,所述采用危险与可操作性分析方法对危险识别,确定与整车运行环境对应的危害事件的过程包括:采用危险与可操作性分析方法对危险识别,即评估每个危险事件的严重度、暴露率和可控性,在所述严重度、暴露率和可控性任一项不为零时,认为不会发生不合理风险。
12、进一步的,所述方法还包括在所述严重度、暴露率和可控性均不为零时,对当前安全事件采取相应的安全措施。
13、进一步的,所述对可能发生的危害事件,基于所述整车级功能控制结构定义安全措施的过程包括:采用因果树或失效模式与影响分析的方法自上而下的分析发生危害的原因,将整车功能级危害分解到系统中各个零部件及软件的功能不足;对各个零部件或者软件的功能不足,采取相应的安全措施。
14、进一步的,所述安全措施包括系统修改、功能限制、权限移交和解决误用。
15、进一步的,所述采集车辆在运行场景中的运行数据,并将所述运行数据进行标注后存入场景库之后还包括:如果再有场景生成,则重新定义相应零部件或者软件对应的安全措施。
16、本发明还提出了用于汽车智能驾驶系统的预期功能安全分系统,包括构建模块、定义模块和验证模块;
17、所述构建模块用于采用系统理论过程分析方法构建用于汽车预期功能安全分析的整车级功能控制架构;
18、所述定义模块用于采用危险与可操作性分析方法对危险识别,确定与整车运行环境对应的危害事件;以及对可能发生的危害事件,基于所述整车级功能控制结构定义各个零部件或者软件对应的安全措施;
19、所述验证模块用于采集车辆在运行场景中的运行数据,并将所述运行数据进行标注后存入场景库;将定义过安全措施的各个零部件或者软件在仿真或实际道路的环境中进行测试验证。
20、进一步的,构建模块中所述整车级功能控制架构的工作过程包括:开启智能驾驶系统后车辆的信息与雷达摄像头感知到的信息会在感知模块中进行融合处理,结果输出给智能驾驶系统平台,智能驾驶系统平台处理后输出车辆的控制信息结果,发动机制动系统接收到控制信号执行相应动作,同时整车控制平台继续将车辆信息传递,形成数据闭环。
21、
技术实现要素:
中提供的效果仅仅是实施例的效果,而不是发明所有的全部效果,上述技术方案中的一个技术方案具有如下优点或有益效果:
22、本发明提出了用于汽车智能驾驶系统的预期功能安全分析方法和系统,该方法包括以下步骤:采用系统理论过程分析方法构建用于汽车预期功能安全分析的整车级功能控制架构;采用危险与可操作性分析方法对危险识别,确定与整车运行环境对应的危害事件;以及对可能发生的危害事件,基于所述整车级功能控制结构定义各个零部件或者软件对应的安全措施;采集车辆在运行场景中的运行数据,并将所述运行数据进行标注后存入场景库;将定义过安全措施的各个零部件或者软件在仿真或实际道路的环境中进行测试验证。基于用于汽车智能驾驶系统的预期功能安全分析方法,还提出了用于汽车智能驾驶系统的预期功能安全分析系统。本发明通过分析可能发生的危害事件并采取相应的安全措施,尽可能地避免商用车在道路行驶的过程中因设计定义不足和性能局限引起的危害而导致不合理的风险,增加车辆的安全性与可靠性。
技术特征:
1.用于汽车智能驾驶系统的预期功能安全分析方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的用于汽车智能驾驶系统的预期功能安全分析方法,其特征在于,所述采用系统理论过程分析方法构建用于汽车预期功能安全分析的整车级功能控制架构具体为:
3.根据权利要求1所述的用于汽车智能驾驶系统的预期功能安全分析方法,其特征在于,所述整车级功能控制架构的工作过程包括:开启智能驾驶系统后车辆的信息与雷达摄像头感知到的信息会在感知模块中进行融合处理,结果输出给智能驾驶系统平台,智能驾驶系统平台处理后输出车辆的控制信息结果,发动机制动系统接收到控制信号执行相应动作,同时整车控制平台继续将车辆信息传递,形成数据闭环。
4.根据权利要求1所述的用于汽车智能驾驶系统的预期功能安全分析方法,其特征在于,所述采用危险与可操作性分析方法对危险识别,确定与整车运行环境对应的危害事件的过程包括:采用危险与可操作性分析方法对危险识别,即评估每个危险事件的严重度、暴露率和可控性,在所述严重度、暴露率和可控性任一项不为零时,认为不会发生不合理风险。
5.根据权利要求4所述的用于汽车智能驾驶系统的预期功能安全分析方法,其特征在于,所述方法还包括在所述严重度、暴露率和可控性均不为零时,对当前安全事件采取相应的安全措施。
6.根据权利要求1所述的用于汽车智能驾驶系统的预期功能安全分析方法,其特征在于,所述对可能发生的危害事件,基于所述整车级功能控制结构定义安全措施的过程包括:采用因果树或失效模式与影响分析的方法自上而下的分析发生危害的原因,将整车功能级危害分解到系统中各个零部件及软件的功能不足;对各个零部件或者软件的功能不足,采取相应的安全措施。
7.根据权利要求6所述的用于汽车智能驾驶系统的预期功能安全分析方法,其特征在于,所述安全措施包括系统修改、功能限制、权限移交和解决误用。
8.根据权利要求6所述的用于汽车智能驾驶系统的预期功能安全分析方法,其特征在于,所述采集车辆在运行场景中的运行数据,并将所述运行数据进行标注后存入场景库之后还包括:如果再有场景生成,则重新定义相应零部件或者软件对应的安全措施。
9.用于汽车智能驾驶系统的预期功能安全分系统,其特征在于,包括构建模块、定义模块和验证模块;
10.根据权利要求9所述的用于汽车智能驾驶系统的预期功能安全分系统,其特征在于,构建模块中所述整车级功能控制架构的工作过程包括:开启智能驾驶系统后车辆的信息与雷达摄像头感知到的信息会在感知模块中进行融合处理,结果输出给智能驾驶系统平台,智能驾驶系统平台处理后输出车辆的控制信息结果,发动机制动系统接收到控制信号执行相应动作,同时整车控制平台继续将车辆信息传递,形成数据闭环。
技术总结
本发明提出了用于汽车智能驾驶系统的预期功能安全分析方法和系统,该方法包括:采用系统理论过程分析方法构建用于汽车预期功能安全分析的整车级功能控制架构;采用危险与可操作性分析方法对危险识别,确定与整车运行环境对应的危害事件;以及对可能发生的危害事件,基于整车级功能控制结构定义各个零部件或者软件对应的安全措施;采集车辆在运行场景中的运行数据,并将运行数据进行标注后存入场景库;将定义过安全措施的各个零部件或者软件在仿真或实际道路的环境中进行测试验证。基于该方法,还提出了用于汽车智能驾驶系统的预期功能安全分析系统。本发明使整个系统在车辆道路安全方面考虑的更加全面,架构更加完整。
技术研发人员:闫新宇,霍艳艳,田磊,郭鹏
受保护的技术使用者:中国重汽集团济南动力有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!