目标操作执行方法、装置、电子设备及存储介质与流程
本申请涉及人工智能,尤其涉及一种目标操作执行方法、装置、电子设备及存储介质。
背景技术:
1、当前,知识图谱已在设备故障运维、质量管控、车间调度等智能制造领域得到初步应用,它能实现“人机物”数据融合,为技术人员提供智能化的决策指导,在一定程度上提高生产效率,保障产品质量。但是,由于制造知识专用性强、复杂多样,知识图谱提取知识的能力不高,认知学习能力有待突破,故现有制造领域知识图谱难以保证提供的决策实时、精确、专业。
2、此外,针对焊装质量管控场景,目前技术人员主要通过查询报表或者依靠经验对其进行管控,还未有相关研究将知识图谱应用到该场景。该种方式效率低,成本高,且对技术人员的专业能力也有极高要求,在一定程度上影响了生产节拍,降低了产品质量。
技术实现思路
1、有鉴于此,本申请实施例提供了一种目标操作执行方法、装置、电子设备及存储介质,以解决现有技术中利用知识图谱指导实际生产操作时决策精度不高、效率较低的问题。
2、本申请实施例的第一方面,提供了一种目标操作执行方法,包括:
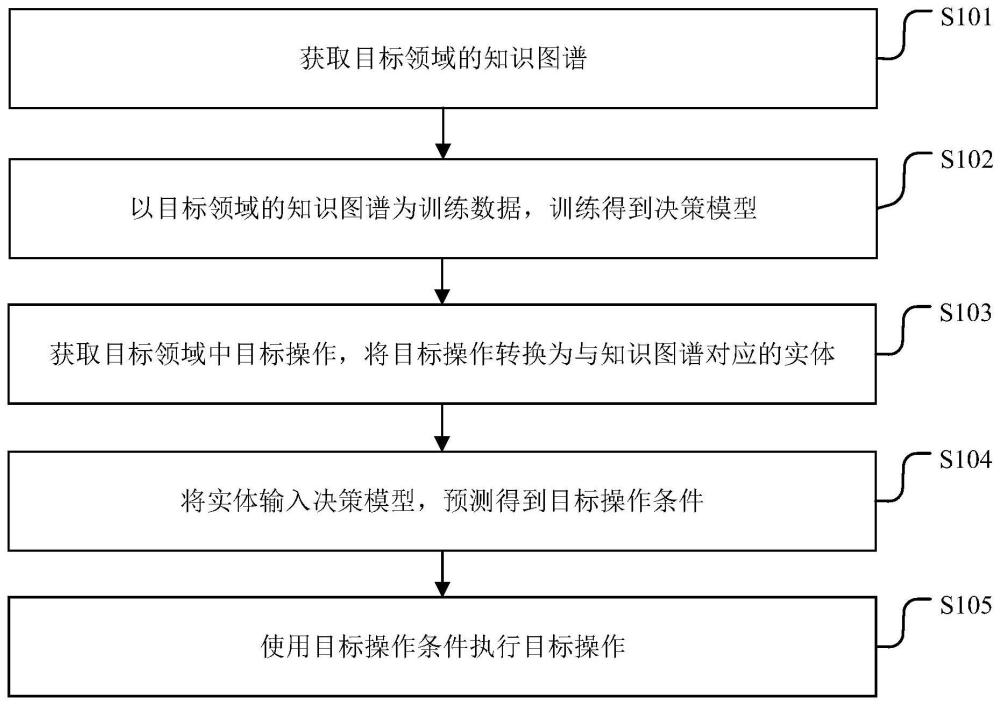
3、获取目标领域的知识图谱;
4、以目标领域的知识图谱为训练数据,训练得到决策模型,决策模型用于基于知识图谱确定目标领域中,操作对应的操作条件;
5、获取目标领域中目标操作,将目标操作转换为与知识图谱对应的实体;
6、将实体输入决策模型,预测得到目标操作条件;
7、使用目标操作条件执行目标操作。
8、本申请实施例的第二方面,提供了一种目标操作执行装置,包括:
9、获取模块,被配置为获取目标领域的知识图谱;
10、训练模块,被配置为以目标领域的知识图谱为训练数据,训练得到决策模型,决策模型用于基于知识图谱确定目标领域中,操作对应的操作条件;
11、转换模块,被配置为获取目标领域中目标操作,将目标操作转换为与知识图谱对应的实体;
12、预测模块,被配置为将实体输入决策模型,预测得到目标操作条件;
13、执行模块,被配置为使用目标操作条件执行目标操作。
14、本申请实施例的第三方面,提供了一种电子设备,包括存储器、处理器以及存储在存储器中并且可在处理器上运行的计算机程序,该处理器执行计算机程序时实现上述方法的步骤。
15、本申请实施例的第四方面,提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现上述方法的步骤。
16、本申请实施例与现有技术相比存在的有益效果是:本申请实施例通过基于目标领域的知识图谱训练决策模型,该决策模型用于基于知识图谱确定目标领域中,操作对应的操作条件,进而针对目标领域中的需要执行的目标操作,首先将该目标操作转换为与知识图谱对应的实体,并将转换后的实体输入训练好的决策模型,预测得到该目标操作对应的模板操作条件,最后使用该目标操作条件执行该目标操作,从而提高操作质量,实现基于目标领域的知识图谱实时、精确、高效指导生产操作,不依赖技术人员的个体经验,提高了操作执行成功的概率,提升了生产效率。
技术特征:
1.一种目标操作执行方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述决策模型包括嵌入表达层、协同编码模块、多模态特征模块和对比学习模块;
3.根据权利要求2所述的方法,其特征在于,所述对所述实体对的第一特征向量进行协同编码,得到第三特征向量,包括:
4.根据权利要求2所述的方法,其特征在于,所述对所述实体对的第二特征向量进行协同编码,得到第四特征向量,包括:
5.根据权利要求2所述的方法,其特征在于,所述在所述多模态特征模块将所述第三特征向量和第四特征向量进行融合,得到融合特征向量,包括:
6.根据权利要求2所述的方法,其特征在于,所述在所述对比学习模块对所述融合特征向量进行对比学习,得到对比学习损失函数,包括:
7.根据权利要求6所述的方法,其特征在于,所述对所述锚定样本、正样本以及负样本分别进行跨模态融合交流编码操作,得到编码向量,包括:
8.根据权利要求1至7中任一项所述的方法,其特征在于,所述对比学习损失函数满足预设条件,包括:
9.一种目标操作执行装置,其特征在于,包括:
10.一种电子设备,包括存储器、处理器以及存储在所述存储器中并且可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至8中任一项所述方法的步骤。
11.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至8中任一项所述方法的步骤。
技术总结
本申请涉及人工智能技术领域,提供了一种目标操作执行方法、装置、电子设备及存储介质。该方法通过基于目标领域的知识图谱训练决策模型,该决策模型用于基于知识图谱确定目标领域中,操作对应的操作条件,进而针对目标领域中的需要执行的目标操作,首先将该目标操作转换为与知识图谱对应的实体,并将转换后的实体输入训练好的决策模型,预测得到该目标操作对应的模板操作条件,最后使用该目标操作条件执行该目标操作,从而提高操作质量,实现基于目标领域的知识图谱实时、精确、高效指导生产操作,不依赖技术人员的个体经验,提高了操作执行成功的概率,提升了生产效率。
技术研发人员:张正萍,李秋,叶松林,李志强,陈继钢
受保护的技术使用者:重庆赛力斯新能源汽车设计院有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!