车道线识别方法、系统、电子设备和存储介质与流程
本公开涉及自动驾驶,尤其涉及一种车道线识别方法、系统、电子设备和存储介质。
背景技术:
1、车道线检测是自动驾驶领域的核心技术之一。车道线检测要求在尽量短的时间内正确检测图像内车道线的位置。
2、相关技术中,有些方案能够准确检测车道线的位置,但是检测方案复杂,检测时间长,无法做到实时处理;有些方案车道线检测速度快,但是检测的准确率较低。因此,亟需一种车道线检测识别方案,在保障车道线检测准确率的前提下,提升检测速度。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本公开实施例提供了一种车道线识别方法、系统、电子设备和存储介质,在保障车道线检测准确率的前提下,能够提升检测速度。
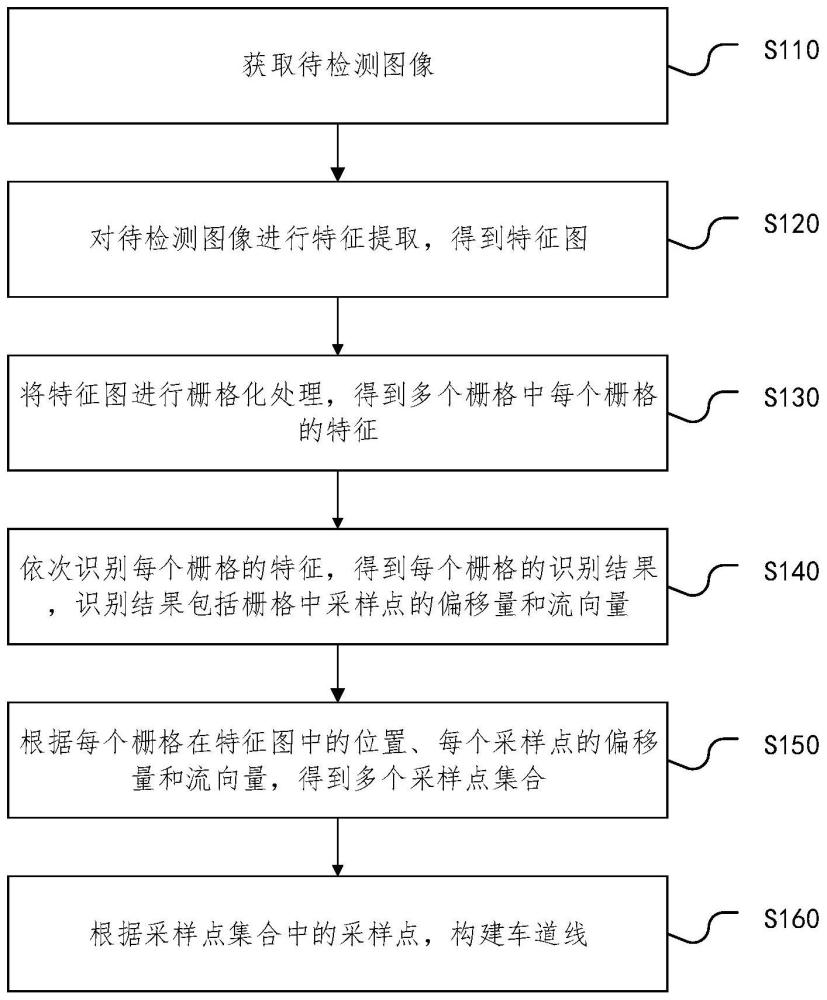
2、第一方面,本公开实施例提供了一种车道线识别方法,该方法包括:
3、获取待检测图像;
4、对待检测图像进行特征提取,得到特征图;
5、将特征图进行栅格化处理,得到多个栅格中每个栅格的特征;
6、依次识别每个栅格的特征,得到每个栅格的识别结果,识别结果包括栅格中采样点的偏移量和流向量;采样点为栅格第一方向的边与车道线的交点;偏移量为第一方向上采样点到当前栅格预设顶点的距离;流向量为当前采样点至下一采样点的方向向量;
7、根据每个栅格在特征图中的位置、每个采样点的偏移量和流向量,得到多个采样点集合;
8、根据采样点集合中的采样点,构建车道线。
9、在本公开的一个实施例中,依次识别每个栅格的特征,得到每个栅格的识别结果,包括:
10、将栅格化处理后的多个栅格的特征输入到预先训练的检测模型中,得到每个栅格的识别结果;
11、其中,检测模型包含第一分支和第二分支;第一分支的输入为栅格的特征,第一分支的输出为采样点的偏移量;第二分支的输入为栅格的特征,第二分支的输出为采样点的流向量。
12、在本公开的一个实施例中,检测模型还包含第三分支;第三分支的输入为栅格的特征,第三分支的输出为车道线类别。
13、在本公开的一个实施例中,识别结果还包括车道线类别;方法还包括:
14、基于采样点集合中多个采样点对应的车道线类别,确定采样点集合对应的车道线的车道线类别。
15、在本公开的一个实施例中,对待检测图像进行特征提取,得到特征图,包括:
16、利用残差网络和特征金字塔结构,对待检测图像进行特征提取,得到特征图。
17、第二方面,本公开实施例还提供了一种车道线识别系统,该系统包括:
18、图像获取模块,被配置为获取待检测图像;
19、特征提取模块,被配置为对待检测图像进行特征提取,得到特征图;
20、栅格化处理模块,被配置为将特征图进行栅格化处理,得到多个栅格中每个栅格的特征;
21、特征识别模块,被配置为依次识别每个栅格的特征,得到每个栅格的识别结果,识别结果包括栅格中采样点的偏移量和流向量;采样点为栅格第一方向的边与车道线的交点;偏移量为第一方向上采样点到当前栅格预设顶点的距离;流向量为当前采样点至下一采样点的方向向量;
22、采样点处理模块,被配置为根据每个栅格在特征图中的位置、每个采样点的偏移量和流向量,得到多个采样点集合;
23、车道线构建模块,被配置为根据采样点集合中的采样点,构建车道线。
24、第三方面,本公开实施例还提供了一种电子设备,所述电子设备包括:一个或多个处理器;存储装置,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如上所述的车道线识别方法。
25、第四方面,本公开实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上所述的车道线识别方法。
26、本公开实施例提供的一种车道线识别方法,将待检测图像对应的特征图进行栅格化处理,得到多个栅格中每个栅格的特征,然后依次识别每个栅格的特征,得到每个栅格的识别结果,识别结果包括栅格中采样点的偏移量和流向量,其中,流向量既判断了方向又提取了采样点,使得检测网络更加精简,无需计算热力图,运算量更少,处理速度更快;根据每个栅格在特征图中的位置、每个采样点的偏移量和流向量,得到多个采样点集合,并根据采样点集合中的采样点构建车道线,两两相邻采样点的线段可以用直线表示,车道线构建过程更简单,并且对于弯道的检测结果更为准确。
技术特征:
1.一种车道线识别方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,根据每个栅格在所述特征图中的位置、每个采样点的偏移量和流向量,得到多个采样点集合,包括:
3.根据权利要求2所述的方法,其特征在于,根据每个采样点在所述特征图中的全局位置和流向量,得到多个采样点集合,包括:
4.根据权利要求2所述的方法,其特征在于,根据每个采样点在所述特征图中的全局位置和流向量,得到多个采样点集合,包括:
5.根据权利要求3或4所述的方法,其特征在于,根据上一采样点的全局位置和上一采样点的流向量,确定上一采样点的流向量所在的第一直线,包括:
6.根据权利要求1所述的方法,其特征在于,依次识别每个栅格的特征,得到每个栅格的识别结果,包括:
7.根据权利要求6所述的方法,其特征在于,所述检测模型还包含第三分支;所述第三分支的输入为栅格的特征,所述第三分支的输出为车道线类别。
8.一种车道线识别系统,其特征在于,所述系统包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一项所述车道线识别方法。
技术总结
本公开实施例公开了一种车道线识别方法、系统、电子设备和存储介质,涉及自动驾驶技术领域。该方法包括:获取待检测图像;对待检测图像进行特征提取,得到特征图;将特征图进行栅格化处理,得到多个栅格中每个栅格的特征;依次识别每个栅格的特征,得到每个栅格的识别结果,识别结果包括栅格中采样点的偏移量和流向量;根据每个栅格在特征图中的位置、每个采样点的偏移量和流向量,得到多个采样点集合;根据采样点集合中的采样点,构建车道线。本公开实施例在保障车道线检测准确率的前提下,能够提升检测速度。
技术研发人员:郭钰,李思洋,李强,张丹,耿秀军
受保护的技术使用者:驭势(上海)汽车科技有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!